技术特征:
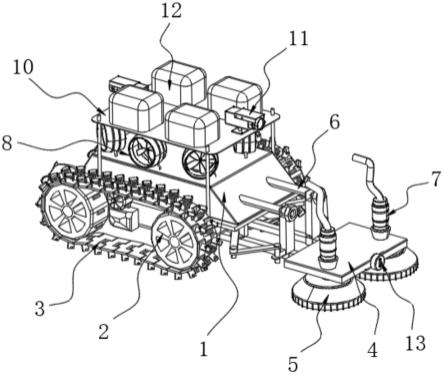
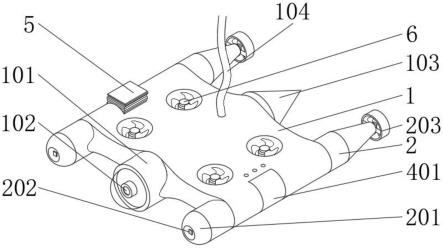
1.一种磁吸履带式水下清洗机器人,包括有线遥控的机体,机体后端安装有行走螺旋桨,机体上安装有行走相机,其特征在于:所述机体左右两侧对撑安装有驱动轮,左右驱动轮上安装有履带,履带包括单节体,多个单节体相互铰接连接,单节体顶部靠左右两侧位置分别通过固定架活动安装有橡胶辊,单节体顶部中间位置安装有永磁体组,机体前侧通过支撑架安装有清洗盘架,清洗盘架底部靠左右位置分别安装有清洗盘;清洗盘顶部通过轴承与清洗盘架活动套装安装有中空管,中空管底部伸至清洗盘架底部,中空管底部安装有射流喷头,清洗盘底部射流喷头外周位置安装有毛刷一,清洗盘底部外周位置安装有毛刷二,毛刷一与毛刷二之间的清洗盘底部安装有刮刀。2.根据权利要求1所述的一种磁吸履带式水下清洗机器人,其特征在于:所述永磁体组采用海尔贝克阵列设置。3.根据权利要求1所述的一种磁吸履带式水下清洗机器人,其特征在于:所述清洗盘架底部中间位置安装有驱动马达,驱动马达与中空管之间通过清洗盘架内的驱动齿轮组相传动连接。4.根据权利要求3所述的一种磁吸履带式水下清洗机器人,其特征在于:所述清洗盘架顶部安装有抵至中空管的输水管。5.根据权利要求1所述的一种磁吸履带式水下清洗机器人,其特征在于:所述机体顶部安装有对应左前、右前、左、右、左下以及右下六个方向的转向螺旋桨,转向螺旋桨采用无轴螺旋桨。6.根据权利要求5所述的一种磁吸履带式水下清洗机器人,其特征在于:所述机体上方通过螺栓安装有顶台,行走相机安装于顶台顶部对应机体前后位置,顶台顶部均匀安装有四个浮块。7.根据权利要求3所述的一种磁吸履带式水下清洗机器人,其特征在于:所述清洗盘架前端安装有与机体信号连接的接近感应器。
技术总结
本实用新型涉及机器人技术领域,且公开了一种磁吸履带式水下清洗机器人,包括有线遥控的机体,机体后端安装有行走螺旋桨,所述机体左右两侧对撑安装有驱动轮,左右驱动轮上安装有履带,履带包括单节体,多个单节体相互铰接连接,单节体顶部靠左右两侧位置分别通过固定架活动安装有橡胶辊,单节体顶部中间位置安装有永磁体组,机体前侧通过支撑架安装有清洗盘架,清洗盘架底部靠左右位置分别安装有清洗盘。通过利用磁吸方式将机器人与船体固定,同时依靠履带方式贴在船体表面移动,搭配遥控机器人,船舶不进港也可进行船底的清洗,清洗操作方便,成本低,同时相较现有人工高压水枪清洗方式,清洗效率也得到提升。清洗效率也得到提升。清洗效率也得到提升。
技术研发人员:何昌洪 刘金阳 贺子言 黄泽宇 严毓成
受保护的技术使用者:中国海洋大学
技术研发日:2022.08.10
技术公布日:2022/10/21
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。