1.本实用新型属于工业生产智能设备领域,具体涉及一种自动充电智能平板车。
背景技术:
2.在冶金企业中常见往返运输物料的平板车,根据其平板上搭载的不同模具,可以运输如钢包、渣包、成品型材等不同物料,其驱动方式由直流,交流两种驱动方式,大多都是通过拖缆进行电力传输,在控制方式上有人工现场操作,有固定站点集中操作,而无线直流驱动的则只是经过车载蓄电池进行供电,但是在充电过程中极为不方便,尤其冬季低温天气下电池性能下降,一旦不能及时进行充电、电池性能及状态无法自动检测且维护不到位时,在续航及日常工作方面将存在极大的不便。且应用与工业场景下的板车大多为有轨设计,无轨的只能通过人工干预才能行走,基于上述种种不便,结合当前物联网,大数据,5g通信,gprs定位、大功率无线充电,图像识别、寻迹传感器等多项技术的背景下设计一款自动充电智能平板车,可以在有轨及无轨方式进行定制化生产运行,可应用与多种工业场合。
技术实现要素:
3.本实用新型的目的是提供一种自动充电智能平板车,以解决现有工业生产用平板车存在的充电不便、需要人工控制行走的问题。
4.本实用新型的技术方案是:一种自动充电智能平板车,包括车体,车体上设有动力系统,还包括控制系统,车体上设有电力检测装置,在车体底部设有寻迹传感器、自动停车传感器和自动充电体,地面上设有与寻迹传感器相配合的标记线、与自动停车传感器相配合的停车感应标记、与自动充电体相配合的自动充电桩,电力检测装置、自动停车传感器和动力系统分别与控制系统相连。
5.作为本实用新型的进一步改进,车体上设有手动充电接头。
6.作为本实用新型的进一步改进,控制系统连接远程控制中心。
7.作为本实用新型的进一步改进,寻迹传感器设有2个且对称设置在车体两端。
8.作为本实用新型的进一步改进,自动停车传感器设有2个且对称设置在车体两端。
9.作为本实用新型的进一步改进,车体上设有gprs导航定位装置,gprs导航定位装置与控制系统相连。
10.作为本实用新型的进一步改进,车体上设有摄像头,摄像头与控制系统相连。
11.作为本实用新型的进一步改进,车体上设有车载屏幕,车载屏幕与控制系统相连。
12.作为本实用新型的进一步改进,车体上设有智能警示灯和智能语音装置,智能警示灯和智能语音装置分别与控制系统相连。
13.本实用新型的有益效果是:本实用新型根据实际需求可采用无轨或有轨设计,采用无轨设计时,车体可由寻迹传感器识别地面上的标记线寻迹行走,无需人工干预车体即可沿设计路线自动行走。在走行路线上,gprs定位导航装置可将车体的实时位置传送给控制系统和远程控制中心,车体通过寻迹传感器与搭载的gprs定位导航装置双重确认路径,
行走过程中通过算法拟合行走路径并通过摄像头实时与拟合轨迹比较,识别场景,进行轨迹及位置纠偏。同时,gprs定位导航装置和摄像头向远程控制中心实时发送数据,监控人员可通过远程控制中心对车体进行监控。当车体电量低时,电力检测装置向控制系统发送信息,控制系统开启自动停车传感器,当自动停车传感器识别到停车感应标记,向控制系统发送信息,控制系统控制动力系统关闭,此时车体停在充电位置,自动充电桩向自动充电体充电。当控制系统接收到工作指令,控制系统关闭自动停车传感器并开启动力系统,车体继续寻迹行走,在无工作指令的间隙中,控制系统开启自动停车传感器,车体可返回充电。本实用新型智能化程度高,可有效提高工作效率。
附图说明
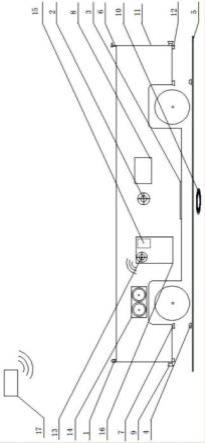
14.图1是本实用新型的结构示意图;
15.图2是本实用新型具体实施方式的工作流程图。
16.图中:1-智能警示灯;2-手动充电接头;3-自动充电体;4-停车感应标记;5-标记线;6-摄像头;7-自动停车传感器;8-车载屏幕;9-智能语音装置;10-自动充电桩;11-车体;12-寻迹传感器;13-gprs导航定位装置;14-动力系统;15-电力检测装置;16-控制系统;17-远程控制中心。
具体实施方式
17.以下结合附图对本实用新型进行详细说明。
18.实施例1、
19.动力系统14采用直流调速驱动。
20.寻迹传感器12根据电磁式或光电式原理工作,标记线5可以通过预埋或地面明装方式实现。
21.如图1所示,一种自动充电智能平板车,包括车体11,车体11上设有动力系统14,还包括控制系统16,车体11上设有电力检测装置15,在车体11底部设有寻迹传感器12、自动停车传感器7和自动充电体3,地面上设有与寻迹传感器12相配合的标记线5、与自动停车传感器7相配合的停车感应标记4、与自动充电体3相配合的自动充电桩10,电力检测装置15、自动停车传感器7和动力系统14分别与控制系统16相连。
22.车体11上设有手动充电接头2。
23.控制系统16连接远程控制中心17。控制系统16获得的所有数据及控制情况均反馈至远程控制中心17,便于工作人员进行监控。
24.寻迹传感器12设有2个且对称设置在车体11两端。自动停车传感器7设有2个且对称设置在车体11两端。
25.车体11上设有gprs导航定位装置13,gprs导航定位装置13与控制系统16相连。
26.车体11上设有摄像头6,摄像头6与控制系统16相连。
27.车体11上设有车载屏幕8,车载屏幕8与控制系统16相连。
28.车体11上设有智能警示灯1和智能语音装置9,智能警示灯1和智能语音装置9分别与控制系统16相连。
29.本实施例的工作流程如图2所示。
30.车体11可由寻迹传感器12识别地面上的标记线5寻迹行走,无需人工干预车体11即可沿设计路线自动行走。在走行路线上,gprs定位导航装置13可将车体的实时位置传送给控制系统16和远程控制中心17,摄像头6将拍摄的影响实时传送给控制系统16和远程控制中心17,车体11通过寻迹传感器12与搭载的gprs定位导航装置13双重确认路径,行走过程中通过算法拟合行走路径并通过摄像头6实时与拟合轨迹比较,识别场景,进行轨迹及位置纠偏。同时,gprs定位导航装置13和摄像头6向远程控制中心实时发送数据,监控人员可通过远程控制中心对车体进行监控。当车体电量低时,电力检测装置15向控制系统16发送信息,控制系统16开启自动停车传感器7,当自动停车传感器7识别到停车感应标记4,向控制系统16发送信息,控制系统16控制动力系统14关闭,此时车体11停在充电位置,自动充电桩10向自动充电体3充电。当控制系统16接收到工作指令,控制系统16关闭自动停车传感器7并开启动力系统14,车体继续寻迹行走工作,在无工作指令的间隙中,控制系统16开启自动停车传感器7,车体11可返回充电,由此可以有效利用工作间隙时间在停车位置感应充电。
31.在无线感应充电出现异常或者需要快速充电时,可直接使用手动充电接头2对电池蓄能。
32.自动行走过程中,控制系统16根据摄像头6拍摄的场景,控制智能警示灯1和智能语音装置全程声光提示。车载屏幕8实时显示载物重量、车辆检测数据、报警等记录信息。
33.车体11可以模块化加装物联网,大数据采集等功能模块,与现场生产过程相衔接,根据自动接收到的生产状态自动工作,对接收的生产计划与工作记录进行数据云传输并产生相应的报表,同时将采集到的机械,电气、仪表等过程数据产生分析结果,自动生成设备维检修计划发送至维修人员及设备管理人员,实现全过程智能化控制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。