1.本实用新型涉及半导体技术领域,具体为一种晶圆表面粗糙度自动检测系统。
背景技术:
2.众所周知,半导体材料是芯片制作过程中最关键的材料,可以用于制作各类半导体器件,并被广泛用于电力电子领域;随着科技的发展,对半导体器件的各方面性能也提出了更高的要求,而半导体器件制造基于材料本身,因此,同样对半导体材料质量也提出了高要求;目前,产业中的半导体材料主要是硅晶圆、碳化硅晶圆、氧化镓晶圆等,表征测试的性能包括表面粗糙度、晶圆尺寸、厚度、主次定位边长度、表面翘曲度等,所采用的设备包括晶圆几何参数测试仪、原子力显微镜、晶圆缺陷检测仪等。
3.其中,晶圆的表面粗糙度一般是用原子力显微镜测试,即先得到晶圆表面形貌图,之后用分析软件得到晶圆表面粗糙度;而在测试过程中,为了得到一张清晰的形貌图,需要手动调节测试相关的参数,这些参数受诸多因素的影响如:晶圆表面颗粒数量、探针针尖曲率大小等。在实际晶圆生产过程中,为了保证出货产品质量稳定,控制检测设备的测试参数一致,规范而流程化地批量测试同样很关键。而且目前,检测半导体晶圆表面粗糙度仍然采取传统的方法,即由操作员手动测试,依照晶圆编号轮流重复测试;出货的半导体晶圆主要采用抽检形式,测试结果很大程度受操作人员的操作方法和测试环境影响,测试结果不稳定,违背测试的严谨性;其中主要表现在:在测试过程中,每次测完一个晶圆,需要换上新的晶圆重新测试,整个过程需要花费较多的时间,此外,在换取晶圆的过程中晶圆有被污染的风险;手动调节晶圆的位置无法使前后两个晶圆的测试位置相同,因此如何高效且大批量测试晶圆,是目前半导体晶圆生产过程中亟待解决的问题。
技术实现要素:
4.本实用新型的目的在于克服晶圆表面粗糙度检测效率不高的问题,提供了一种晶圆表面粗糙度自动检测系统。
5.为了实现上述目的,本实用新型提供一种晶圆表面粗糙度自动检测系统,包括:显微镜、机械手臂和晶圆装置;所述晶圆装置用于存放多个晶圆,所述显微镜用于对放置在样品台上的晶圆表面的粗糙度进行检测,所述机械手臂用于依次将存放在所述晶圆装置中的晶圆取出并移动放置到所述显微镜的样品台上再将检测完成的所述晶圆从所述显微镜的样品台上移动存放到所述晶圆装置中。
6.作为一种可实施方式,所述机械手臂包括机械手臂底座、设于所述机械臂底座上方的旋转部和设于所述旋转部上方的机械臂,所述旋转部带动所述机械臂进行旋转,使得所述机械臂能够分别移动到所述晶圆装置处和所述显微镜的样品台处。
7.作为一种可实施方式,所述机械臂包括固定部和吸取部,所述固定部安装在所述旋转部上方,所述吸取部与所述固定部活动连接,用于进入所述晶圆装置进行取放晶圆;所述吸取部设有真空吸口,用于当所述吸取部进入所述晶圆装置后通过所述真空吸口以真空
吸取的方式取出存放在所述晶圆装置中的晶圆并移动放置到所述显微镜的样品台上,再通过所述吸取部的真空吸口以真空吸取的方式将检测完成的所述晶圆从所述显微镜的样品台上移动存放到所述晶圆装置中。
8.作为一种可实施方式,所述样品台设有真空吸孔,所述真空吸孔用于当所述晶圆放置在样品台表面时对所述晶圆进行真空吸附,防止所述晶圆滑落。
9.作为一种可实施方式,所述样品台还设有陶瓷针脚,所述陶瓷针脚位于所述真空吸孔的四周;所述陶瓷针脚用于当未接触到所述晶圆时上升并保持在预定高度,当接触到所述晶圆时下降,使得所述晶圆贴合在所述样品台表面。
10.作为一种可实施方式,所述晶圆装置包括固定基座和晶圆存放装置,所述固定基座用于固定所述晶圆存放装置,所述晶圆存放装置用于存放多个晶圆。
11.作为一种可实施方式,所述固定基座包括固定底座和固定凸块,所述固定凸块设于所述固定底座的上方;所述晶圆存放装置包括晶圆架、设于所述晶圆架底部的固定凹槽和设于所述晶圆架内部的多个竖直设立的卡槽,其中,每个所述卡槽都用于存放一个晶圆,所述固定凹槽与所述固定凸块相对应,所述固定基座通过将所述固定凸块嵌入到所述固定凹槽中与所述晶圆存放装置相固定。
12.作为一种可实施方式,所述固定基座还包括固定支架,所述固定支架设于所述固定底座的上方且为包围所述固定凸块的包围结构,所述固定支架内部用于容纳所述晶圆存放装置。
13.作为一种可实施方式,还包括减震装置,所述显微镜、所述机械手臂和所述晶圆装置都放置在所述减震装置中进行操作。
14.作为一种可实施方式,所述显微镜为原子力显微镜。
15.本实用新型的有益效果:本实用新型提供一种晶圆表面粗糙度自动检测系统,包括:显微镜、机械手臂和晶圆装置;晶圆装置用于存放多个晶圆,显微镜用于对放置在样品台上的晶圆表面的粗糙度进行检测,机械手臂用于依次将存放在所述晶圆装置中的晶圆取出并移动放置到所述显微镜的样品台上再将检测完成的所述晶圆移动存放到所述晶圆装置中。通过使用本实用新型的自动检测系统提高了晶圆表面粗糙度的检测效率,用时也降低了晶圆在转移过程中被污染的风险。
附图说明
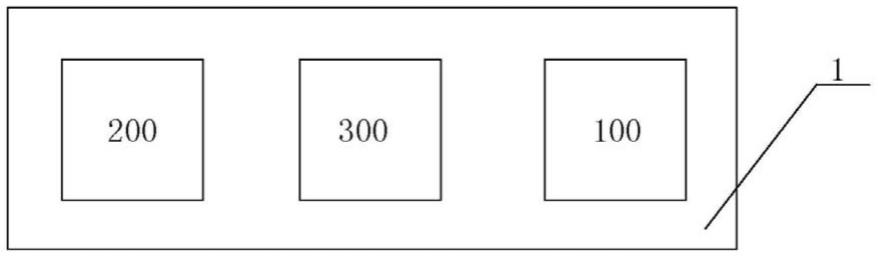
16.图1为本实用新型实施例晶圆表面粗糙度自动检测系统中显微镜、机械手臂和晶圆装置的位置示意图;
17.图2为本实用新型实施例晶圆表面粗糙度自动检测系统中样品台的结构示意图;
18.图3为本实用新型实施例晶圆表面粗糙度自动检测系统中陶瓷针脚和真空吸孔的位置示意图;
19.图4为本实用新型实施例晶圆表面粗糙度自动检测系统中机械手臂的结构示意图;
20.图5为本实用新型实施例晶圆表面粗糙度自动检测系统中固定基座的结构示意图;
21.图6为本实用新型实施例晶圆表面粗糙度自动检测系统中晶圆存放装置的结构示
意图。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.本实施例提供一种技术方案:一种晶圆表面粗糙度自动检测系统,包括:显微镜、机械手臂和晶圆装置;所述晶圆装置用于存放多个晶圆,所述显微镜用于对放置在样品台上的晶圆表面的粗糙度进行检测,所述机械手臂用于依次将存放在所述晶圆装置中的晶圆取出并移动放置到所述显微镜的样品台上再将检测完成的所述晶圆从所述显微镜的样品台上移动存放到所述晶圆装置中。
24.其中,所述显微镜具体为原子力显微镜,本实施例的晶圆表面粗糙度自动检测系统还包括减震装置,所述显微镜、所述机械手臂和所述晶圆装置都放置在所述减震装置中进行操作,进一步降低了检测过程中被污染的风险,以及提高了检测过程中的稳定性;如图1所示为显微镜200、机械手臂300和晶圆装置100放在减震装置1中的位置示意图。
25.如图4所示为机械手臂,其中,图4中的(a)为所述机械手臂的正视图,图4中的(b)为所述机械手臂的侧视图,图4中的(c)为所述机械手臂的俯视图,所述机械手臂包括机械手臂底座350、设于所述机械臂底座350上方的旋转部310和设于所述旋转部310上方的机械臂340,所述旋转部310带动所述机械臂340进行旋转,使得所述机械臂340能够分别移动到所述晶圆装置处和所述显微镜的样品台处。
26.所述机械臂包括固定部341和吸取部342,所述固定部341安装在所述旋转部上方,所述吸取部342与所述固定部341活动连接,用于进入所述晶圆装置进行取放晶圆;所述吸取部342设有真空吸口330,用于当所述吸取部342进入所述晶圆装置后通过所述真空吸口330以真空吸取的方式取出存放在所述晶圆装置中的晶圆并移动放置到所述显微镜的样品台上,再通过所述吸取部342的真空吸口330以真空吸取的方式将检测完成的所述晶圆从所述显微镜的样品台移动存放到所述晶圆装置中。
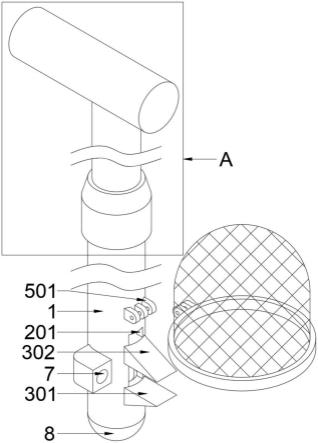
27.如图2所示为显微镜的样品台10,所述样品台表面20上方为显微镜的扫描探针30,所述样品台设有真空吸孔21,所述真空吸孔21用于当所述晶圆放置在所述样品台表面20的晶圆放置区域22时对所述晶圆进行真空吸附,防止所述晶圆滑落。
28.如图3所示,所述样品台还设有陶瓷针脚24,所述陶瓷针脚24位于所述真空吸孔21的四周;所述陶瓷针脚用于当未接触到所述晶圆时自动上升并保持在预定高度,当接触到所述晶圆时自动下降,使得所述晶圆贴合在样品台表面20。
29.具体的,当检测开始时所述陶瓷针脚24上升,所述机械手臂将存放到所述晶圆装置中的晶圆取出并移动放置到所述陶瓷针脚24上,所述陶瓷针脚24接触到所述晶圆后下降,使得所述晶圆贴合在样品台表面20,同时,所述真空吸孔开启对所述晶圆的真空吸附,所述显微镜完成检测后,所述陶瓷针脚24上升,所述机械手臂将放置在所述陶瓷针脚24上的晶圆移动存放到所述晶圆装置中;重复上述步骤,所述机械手臂再依次将存放在到所述晶圆装置中的其他晶圆取出进行检测。
30.所述晶圆装置包括固定基座和晶圆存放装置,所述固定基座用于固定所述晶圆存放装置,所述晶圆存放装置用于存放多个晶圆。
31.如图5所示为固定基座,其中,图5中的(a)为所述固定基座的正视图,图5中的(b)为所述固定基座的侧视图,图5中的(c)为图5中的(a)的a-a面剖视图,所述固定基座包括固定底座110、固定支架120和固定凸块140,所述固定凸块140设于所述固定底座110的上方中部,所述固定支架120设于所述固定底座110的上方且为包围所述固定凸块的包围结构,所述固定支架120内部用于容纳所述晶圆存放装置。
32.如图6所示为晶圆存放装置,其中,图6中的(a)为所述晶圆存放装置的正视图,图6中的(b)为所述晶圆存放装置的侧视图,图6中的(c)为所述晶圆存放装置的俯视图,所述晶圆存放装置包括晶圆架230、设于所述晶圆架230底部的固定凹槽210和设于所述晶圆架230内部的多个竖直设立的卡槽220,其中,每个所述卡槽220都用于存放一个晶圆,即当所述晶圆放置在所述卡槽中时,所述晶圆是竖直放在其中,所述固定凹槽210与所述固定凸块140相对应,所述固定基座通过将所述固定凸块140嵌入到所述固定凹槽210中与所述晶圆存放装置相固定。
33.需要注意的是,为了方便取放晶圆,如图6所示,本实施例设置的卡槽220是竖直设立的,而放在卡槽内的多个晶圆是面与面相对的,因此,机械手臂的吸取部需要进入晶圆装置中抵达所述晶圆表面从而能够吸取晶圆的表面将晶圆取出,并在检测完成后将晶圆放入卡槽,再依次取出其他晶圆进行检测。
34.使用本实施例的具体操作方法为:首先打开原子力显微镜,原子力显微镜上的陶瓷针脚上升;接着,将待测晶圆依次放入晶圆装置的卡槽中,之后将晶圆装置固定在固定基座上,使固定凹槽和固定凸块相互匹配嵌入,将减震装置的罩子合上,使测试环境封闭,机械手臂的吸取部依次获取晶圆装置中的晶圆,准确的放在原子力显微镜的样品台上的陶瓷针头上,陶瓷针头接触到晶圆后,自动下落,真空吸口开启真空吸附功能,接着由原子力显微镜进行自动检测分析,检测完成后,真空吸口关闭真空吸附功能,陶瓷针脚再次上升,机械手臂的吸取部将测试完成的晶圆放回晶圆装置,再取出下一枚晶圆进行测试,测试过程与上一枚晶圆一致。
35.本实用新型公开的晶圆表面粗糙度自动检测系统可以同时测试较多数量的晶圆的粗糙度,其中,具体数量根据卡槽的数量而定,同时可以自动换取晶片,提高了测试效率,降低了晶圆在转移过程中被污染的风险,并使测试流程化,保证出货晶片测试参数的一致。
36.本实用新型虽然己以较佳实施例公开如上,但其并不是用来限定本实用新型,任何本领域技术人员在不脱离本实用新型的精神和范围内,都可以利用上述揭示的方法和技术内容对本实用新型技术方案做出可能的变动和修改,因此,凡是未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本实用新型技术方案的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。