1.本实用新型涉及工件打磨技术领域,尤其涉及一种桌面级打磨实训平台。
背景技术:
2.随着科技的发展,越来越复杂的产品在推向市场,越来越多的机壳为了达到其精度和品质要求需要打磨处理,打磨工艺在现代工业中有着悠久的历史,从汽车到轮船到火箭甚至航天都有用到,打磨工艺同样也适用于音响壳的制造。另外,打磨工艺的好坏与打磨设备及打磨的方式或方法有着密不可分的关系。当普通人力生产满足不了生产需求的时候,更高效的打磨自动化设备被开发出来,但是自动化设备开发是个有较高技术含量的事情,在打磨方面,经验、技术、人力都有一定的约束,在某些手机壳、音响壳、ipad壳中的生产中,由于这些手机壳、音响壳、ipad壳均为硅胶壳,其都是需要油压成型后再进行打磨毛边。
3.公告号cn207387272u公开了一种六轴机械手打磨设备,通过用机械手带动打磨装置对自动送料装置中的物料产品进行打磨,同时配合自动换砂纸装置来实现自动更换砂纸,整个过程自动进行,有效避免人工操作上不同的技术以及力度问题给产品所带来的影响,但该打磨设备需要借助自动送料装置进行送料,需要将自动送料装置和机械手同时配置适当,才能使得待打磨件在理想状态下得到更好的成品。并且该打磨设备的打磨装置在对待打磨件进行打磨过程中,会对待打磨件施力,造成打磨件偏移,使得与打磨效果与理想状态具有偏差。
技术实现要素:
4.有鉴于此,有必要提供一种桌面级打磨实训平台,用以解决上述背景技术所涉及的技术问题。
5.根据本实用新型的一个方面,提供一种桌面级打磨实训平台,包括:
6.试验台,其桌面上分别间隔设有打磨区域和安装区域;
7.机械臂,包括机械臂本体、转动机构及两个电磁定位机构,所述机械臂本体固定安装于所述安装区域且可在三维空间任意轨迹运动,所述转动机构设于所述机械臂本体的输出端上,两个所述电磁定位机构分别设于所述转动机构的相对两侧且均与所述机械臂本体电性连接;
8.打磨平台,固定于所述打磨区域,所述打磨平台包括磨台、夹持组件及压力传感器,所述磨台的台面设有限位凹槽、所述压力传感器安装于所述限位凹槽内,所述夹持组件设于所述限位凹槽的周边以夹持所述限位凹槽内的待打磨件;
9.抓取件载具,与其中一个所述电磁定位机构电磁连接以抓取待打磨件;
10.打磨件载具,与另一个所述电磁定位机构电磁连接以打磨待打磨件;
11.plc控制器,其输入端与所述压力传感器电性连接,其输出端分别与所述夹持组件和所述机械臂电性连接。
12.根据一些实施例,所述抓取件载具包括第一安装部、吸盘及抽吸气路系统,所述安
装部与其中一个所述电磁定位机构配合嵌入且电磁连接,抽吸气路系统的输入端与所述安装部电性连接,所述吸盘与所述抽吸气路系统的输出端连接以吸取待打磨件。
13.根据一些实施例,所述打磨件载具包括打磨盘本体和第二安装部,所述安装部与另一个所述电磁定位机构配合嵌入且电磁连接,所述打磨盘本体与所述第二安装部电性连接以打磨待打磨件。
14.根据一些实施例,所述限位凹槽边缘设有向所述磨台的台面倾斜向上延伸的延伸环面。
15.根据一些实施例,所述夹持组件包括驱动机构、丝杆、导向杆及两个夹持板,所述驱动机构安装于所述试验台上,所述导向杆的相对两端固定于所述试验台的相对两侧,所述丝杆与所述导向杆间隔且平行设置,两个所述夹持板一侧的底部与所述导向杆滑动连接,其顶部与所述丝杆螺纹连接。
16.根据一些实施例,还包括储存架,所述储存架上间隔设有多个放置卡槽,每个所述放置卡槽均配置为可放置所述抓取件载具或所述打磨件载具的结构。
17.根据一些实施例,还包括垛码架,安装于所述试验台上,用于放置待打磨件。
18.根据一些实施例,还包括四个滚轮,呈矩形阵列布置于所述工作台底部,以供所述工作台移动。
19.根据一些实施例,还包括多个吸盘底座,多个所述吸盘底座均匀布置于所述试验台底部。
20.根据一些实施例,所述试验台的安装区域设有安装孔,所述打磨平台的底部与所述安装孔配合卡接。
21.与现有技术相比,本实用新型的有益效果如下:
22.该桌面级打磨实训平台在对待打磨件进行打磨实操时,机械臂输出端上电磁连接的抓取件载具,抓取待打磨件置于限位凹槽内,此时,位于限位凹槽内的压力传感器同时将受压信号输送至plc控制器,由plc控制器控制夹持组件夹紧限位凹槽内的待打磨件,与此同时plc控制器经机械臂本体控制转动机构转动预设角度,使得转动机构上电磁连接的打磨件载具转动至适配的位置,由打磨件载具对夹紧的待打磨件进行打磨作业,从而同时了对待打磨件的打磨效率和打磨效果。
附图说明
23.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
24.图1为本实用新型提供的一种桌面级打磨实训平台的等轴测结构示意图;
25.图2为本实用新型提供的一种桌面级打磨实训平台的主视结构示意图;
26.图3为图2中局部放大结构示意图。
27.图中:试验台1、机械臂2、机械臂本体21、转动机构22、电磁定位机构23、打磨平台3、磨台31、限位凹槽32、抓取件载具4、打磨件载具5、plc控制器6、垛码架7。
具体实施方式
28.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
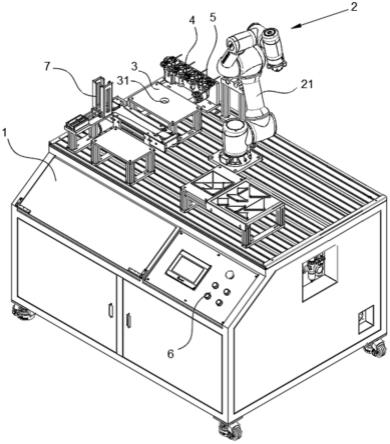
29.请参阅图1-3所示,本实用新型提供一种桌面级打磨实训平台,该桌面级打磨实训平台包括试验台1、机械臂2、打磨平台3、抓取件载具4、打磨件载具5及plc控制器6,其中抓取件载具4和打磨件载具5均可与机械臂2的输出端电磁连接,以便于装卸,同时通过打磨平台3与机械臂2的配合以及结合plc控制器6的自动化控制,可对待打磨件进行自动化打磨,极大的提高了对打磨工件的打磨效率,其具体方案如下。
30.试验台1的桌面上分别间隔设有打磨区域和安装区域,其中机械臂2包括机械臂本体21、转动机构22及两个电磁定位机构23,机械臂本体21固定安装于安装区域且可在三维空间任意轨迹运动,转动机构22设于机械臂本体21的输出端上,两个电磁定位机构23分别设于转动机构22的相对两侧且均与机械臂本体21电性连接。
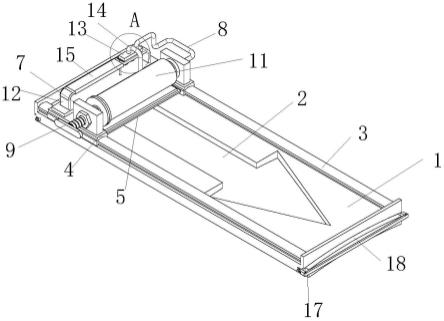
31.打磨平台3固定于打磨区域,打磨平台3包括磨台31、夹持组件(未在图中示出)及压力传感器(未在图中示出),磨台31的台面设有限位凹槽32,压力传感器安装于限位凹槽32内,夹持组件设于限位凹槽32的周边以夹持限位凹槽32内的待打磨件。
32.抓取件载具4与其中一个电磁定位机构23电磁连接以抓取待打磨件;打磨件载具5与另一个电磁定位机构23电磁连接以打磨置于限位凹槽32内且被夹持组件所加持的待打磨件。另外,plc控制器6的输入端与压力传感器电性连接,其输出端分别与夹持组件和机械臂2电性连接。
33.上述方案中,该桌面级打磨实训平台在对待打磨件进行打磨实操时,机械臂2输出端上电磁连接的抓取件载具4,抓取待打磨件置于限位凹槽32内,此时,位于限位凹槽32内的压力传感器同时将受压信号输送至plc控制器6,由plc控制器6控制夹持组件夹紧限位凹槽32内的待打磨件,与此同时plc控制器6经机械臂本体21控制转动机构22转动预设角度,使得转动机构22上电磁连接的打磨件载具5转动至适配的位置,由打磨件载具5对夹紧的待打磨件进行自动化的打磨作业,极大的提高了对打磨工件的打磨效率。
34.根据一些实施例,夹持组件包括驱动机构、丝杆、导向杆及两个夹持板,驱动机构安装于试验台1上,导向杆的相对两端固定于试验台1的相对两侧,丝杆与导向杆间隔且平行设置,两个夹持板一侧的底部与导向杆滑动连接,其顶部与丝杆螺纹连接,通过两个夹持板协同配合以将待打磨件夹紧。
35.根据一些实施例,抓取件载具4包括第一安装部、吸盘及抽吸气路系统,安装部与其中一个电磁定位机构23配合嵌入且电磁连接,抽吸气路系统的输入端与安装部电性连接,吸盘与抽吸气路系统的输出端连接以吸取待打磨件。
36.另外,打磨件载具5包括打磨盘本体和第二安装部,安装部与另一个电磁定位机构23配合嵌入且电磁连接,打磨盘本体与第二安装部电性连接以打磨待打磨件。
37.进一步地,考虑到抓取件载具4在抓取待打磨件放置于限位凹槽32内时,其抓取精准度存在一定误差,由此为了提高待打磨件被抓取后释放时的精准度,限位凹槽32边缘设有向磨台31的台面倾斜向上延伸的延伸环面(未在图中示出)。使得待打磨件落在限位凹槽32边缘时,通过楔形的延伸环面使得待打磨件落入到限位凹槽32的中间位置。
38.该桌面级打磨实训平台还包括储存架,储存架上间隔设有多个放置卡槽,每个放置卡槽均配置为可放置抓取件载具4或打磨件载具5的结构,将抓取件载具4或打磨件载具5有序放置,而降低抓取件载具4或打磨件载具5被损坏的概率。
39.该桌面级打磨实训平台还包括垛码架7,安装于试验台1上,用于放置待打磨件,将需要打磨的待打磨件置于垛码架7上以便于机械手上的抓取件载具4便于抓取。
40.该桌面级打磨实训平台还包括四个滚轮,呈矩形阵列布置于工作台底部,以供工作台移动。该桌面级打磨实训平台也可以包括多个吸盘底座,多个吸盘底座均匀布置于试验台1底部,通过吸盘底座将试验台1固定在地面,保证机器人工作过程的稳定性。试验台1的安装区域设有安装孔,打磨平台3的底部与安装孔配合卡接,而便于使得打磨平台3便于装卸。
41.工作原理:该桌面级打磨实训平台在对待打磨件进行打磨实操时,机械臂2输出端上电磁连接的抓取件载具4,抓取待打磨件置于限位凹槽32内,此时,位于限位凹槽32内的压力传感器同时将受压信号输送至plc控制器6,由plc控制器6控制夹持组件夹紧限位凹槽32内的待打磨件,与此同时plc控制器6经机械臂本体21控制转动机构22转动预设角度,使得转动机构22上电磁连接的打磨件载具5转动至适配的位置,由打磨件载具5对夹紧的待打磨件进行打磨作业,从而同时了对待打磨件的打磨效率和打磨效果。
42.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本实用新型的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。