1.本实用新型涉及机器人技术领域,尤其是涉及一种动力模组及具有其的机器人。
背景技术:
2.在机器人等机器中,通常用到动力模组驱动机器人运动。在相关技术中,动力模组的工作过程中其内部产生大量的热,而动力模组内的热量堆积后容易对动力模组的正常功能产生影响,因此如何实现动力模组的内部散热成为了本领域丞待解决的技术问题。
技术实现要素:
3.本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型的一个目的在于提出一种动力模组,所述动力模组具有较好的散热效果。
4.本实用新型还旨在提出一种具有上述动力模组的机器人。
5.根据本实用新型实施例的动力模组,包括:壳体,所述壳体形成有收容腔、第一开口和第二开口;定子和转子,所述转子可相对所述定子转动,所述转子包括转子支架和转子磁铁,所述转子支架设置于所述收容腔内并与所述转子磁铁连接,所述转子磁铁和所述定子间隔相对设置;减速机构,所述减速机构的输入端与所述转子支架联动;法兰盘,所述法兰盘可转动地设置于所述壳体的第一开口处,所述法兰盘与所述减速机构的输出端连接;支撑部,所述支撑部设置于所述壳体内的收容腔,所述支撑部和所述壳体为一体结构或者为可拆卸的连接结构;所述支撑部包括支撑壁和管路防护壁,所述支撑壁的一端与壳体连接,所述支撑壁与所述壳体的内周壁间隔开,形成用于容纳所述转子和所述定子的第一容纳空间,所述定子固定于所述支撑部上;所述支撑壁的另一端与所述管路防护壁连接,所述管路防护壁和支撑壁形成第二容纳空间;冷却管路和散热管路,所述冷却管路至少部分收容于所述第二容纳空间内,所述散热管路设置于所述壳体外周,所述散热管路与所述冷却管路相连并导通构成回路,所述冷却介质在所述冷却管路内吸热相变以驱动所述冷却介质在所述回路内流动。
6.根据本实用新型实施例的动力模组,冷却介质能够在冷却管路和散热管路形成的导通回路中循环流动,且冷却介质在冷却管路时吸热,在散热管路时放热,将第二容纳空间内的热量吸收并散发到动力模组外。从而能够减少动力模组内的热量堆积,提高动力模组的散热效果,减少由于动力模组过热导致对其功能的影响。
7.在一些实施例中,所述冷却管路包括:第一进水段和第一出水段,所述第一进水段与所述第一出水段部分盘绕于所述支撑壁和/或所述管路防护壁,所述第一进水段与所述第一出水段在转子转动的轴向上交替设置。
8.进一步地,所述散热管路包括:第二进水段和第二出水段,所述第二进水段与所述第二出水段至少部分盘绕于所述壳体外周,所述第二进水段与所述第二出水段在转子转动的轴向上交替设置,所述第二进水段和所述第二出水段通过紧固件连接和/或粘接方式与所述壳体固定,所述第二进水段的起始端与所述第一出水段的末端连通,所述第二进水段
的末端与所述第二出水段的起始端连通,所述第二出水段的末端与所述第一进水段的起始端连通。
9.具体地,所述动力模组还包括:连接管,所述连接管可拆卸地连接于所述第一出水段的末端与所述第二进水段的起始端,和/或所述第一进水段的起始端与所述第二出水段的末端。
10.在一些实施例中,所述动力模组还包括第二端盖,所述第二端盖盖设于所述壳体的第二开口,所述第一出水段的末端与所述第一进水端的起始端伸出第二端盖。
11.进一步地,所述壳体的第二开口处还凸设有环形壁,所述第一出水段的末端与所述第一进水端的起始端穿过所述环形壁,伸出所述壳体。
12.在一些实施例中,所述转子支架还设有凸起环,所述管路防护壁还设有抵接环,所述管路防护壁的抵接环和所述转子支架的凸起环之间通过转子轴承转动连接。
13.进一步地,所述动力模组限位件,所述限位件设置于所述管路防护壁上且至少部分与所述冷却管路在转子转动的轴向上正对,所述限位件用于防止冷却管路发生位移。
14.在一些实施例中,所述转子支架还设有中心凸轴,所述中心凸轴与所述凸起环之间形成有第三容纳空间,在所述第三容纳空间内设有第一感测件,所述减速机构包括行星架,在所述行星架上设有第一磁性件,且与所述第一感测件间隔相对设置,在所述中心凸轴远离减速机构的方向的一端设有第二磁性件,在电路板上设有第二感测件,所述第二感测件和所述第二磁性件间隔相对设置。
15.根据本实用新型实施例的机器人,包括:主体;与所述主体连接的动力模组,所述动力模组上述实施例中任意一项所述的动力模组。
16.根据本实用新型实施例的机器人,通过采用上述实施例中的任意一项的动力模组,动力模组具有较好的散热,能够保证机器人的动力供应较为可靠,从而提高机器人整体的功能可靠性
17.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
18.本实用新型的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
19.图1是根据本实用新型第一实施例的动力模组的结构剖视图;
20.图2是图1实施例的动力模组的部分结构爆炸图;
21.图3是图1实施例的动力模组的另一部分结构爆炸图;
22.图4是图1实施例的动力模组的冷却管路安装位置示意图;
23.图5是根据本实用新型第二实施例的动力模组的结构剖视图;
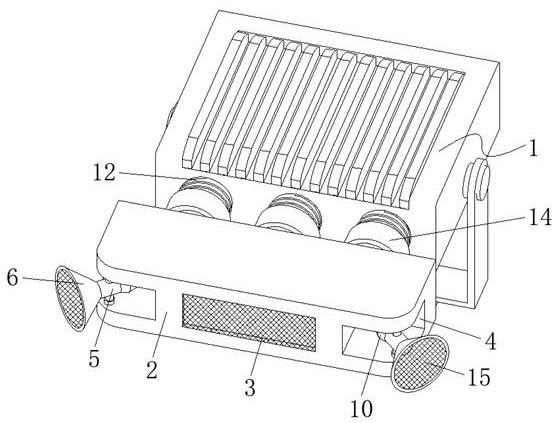
24.图6是根据本实用新型实施例的机器人的结构示意图。
25.附图标记:
26.机器人1000、
27.动力模组100、
28.壳体11、收容腔110、第一开口111、第二开口112、环形壁113、
29.定子12、
30.转子13、
31.转子支架131、凸起环1311、中心凸轴1312、第三容纳空间1313、第二磁性件1314、
32.转子磁铁132、转子轴承133、
33.减速机构14、
34.输入端141、输出端142、
35.行星架143、第一磁性件1431、
36.法兰盘15、
37.支撑部16、
38.支撑壁161、
39.管路防护壁162、抵接环1621、
40.第一容纳空间163、第二容纳空间164、
41.冷却管路17、第一进水段171、第一出水段172、
42.散热管路18、第二进水段181、第二出水段182、
43.连接管19、
44.第二端盖20、
45.限位件21、
46.第一感测件22、第二感测件23、
47.机械腿200、主体300。
具体实施方式
48.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。
49.在本实用新型的描述中,需要理解的是,术语“中心”、“长度”、“内”、“外”、“轴向”、“径向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
50.此外,在本实用新型的描述中,“第一特征”、“第二特征”可以包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上。
51.需要说明的是,在本实用新型的描述中,第一特征在第二特征“之上”或“之下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。在本实用新型的描述中,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。
52.下面参考附图描述根据本实用新型实施例的动力模组100及具有其的机器人1000。
53.如图1、图2和图4所示,根据本实用新型实施例的动力模组100,包括:壳体11、定子
12和转子13、减速机构14、法兰盘15、支撑部16以及冷却管路17和散热管路18。
54.其中,壳体11形成有收容腔110、第一开口111和第二开口112。
55.转子13可相对定子12转动,转子13包括转子支架131和转子磁铁132,转子支架131设置于收容腔110内并与转子磁铁132连接,转子磁铁132和定子12间隔相对设置。
56.减速机构14的输入端141与转子支架131联动。
57.法兰盘15可转动地设置于壳体11的第一开口111处,法兰盘15与减速机构14的输出端142连接。
58.支撑部16设置于壳体11内的收容腔110,支撑部16和壳体11为一体结构或者为可拆卸的连接结构。支撑部16包括支撑壁161和管路防护壁162,支撑壁161的一端与壳体11连接,支撑壁161与壳体11的内周壁间隔开,形成用于容纳转子13和定子12的第一容纳空间163,定子12固定于支撑部16上。支撑壁161的另一端与管路防护壁162连接,管路防护壁162和支撑壁161形成第二容纳空间164。
59.冷却管路17至少部分收容于第二容纳空间164内,散热管路18设置于壳体11外周,散热管路18与冷却管路17相连并导通构成回路,冷却介质在冷却管路17内吸热相变以驱动冷却介质在回路内流动。
60.需要说明的是,在动力模组100工作时,定子12需要通电产生磁场以驱动转子13转动,在驱动转子13转动的过程中进行做工并产生大量热量,而转子13上绕组的温度升高将影响到电机的性能,并且在不及时散热的情况下将导致安全隐患的发生。
61.可以理解的是,定子12和转子13设置在第一容纳空间163内,第一容纳空间163与第二容纳空间164通过支撑壁161分隔开,此时,定子12和转子13产生的热量能够从第一容纳空间163经过支撑壁161传递到第二容纳空间164内。通过设置至少部分收容于第二容纳空间164内的冷却管路17,且冷却介质的温度低于第二容纳空间164的温度,冷却管路17内的冷却介质能够吸收第二容纳空间164内的热量,冷却介质吸热后相变并驱动冷却介质沿回路流动到散热管路18中,此时,冷却介质的温度高于散热管路18外侧的温度,从而冷却介质在散热管路18实现放热,放热降温后的冷却介质通过回路重新流动到冷却管路17内,可再次吸收第二容纳空间164的热量。冷却管路17与散热管路18形成回路,并在冷却介质吸热后产生相变并进行流动,利用冷却管路17所吸收的热量使冷却介质自发进行流动,无需驱动单元,结构简单,降低了动力模组整体的重量。
62.由此,本技术的动力模组100,冷却介质能够在冷却管路17和散热管路18形成的导通回路中循环流动,且冷却介质在冷却管路17时吸热,在散热管路18时的放热,将第二容纳空间164内的热量吸收并散发到动力模组100外。从而能够减少动力模组100内的热量堆积,提高动力模组100的散热效果,减少由于动力模组100过热导致对其功能的影响。
63.在一些实施例中,如图1所示,冷却管路17包括:第一进水段171和第一出水段172。
64.其中,第一进水段171与第一出水段172部分盘绕于支撑壁161或管路防护壁162、或同时缠绕于支撑壁161和管路防护壁162上。第一进水段171与第一出水段172连通,在第二容纳空间164中形成冷却管路。且第一进水段171的进水口和第一出水段172的出水口设置在壳体11外部,上述的进水口和出水口用于与壳体11外部的散热管路18连通,如此设置将冷却介质由进水口输入至冷却管路17中,并将吸热后的冷却介质由出水口排出至壳体11外部的散热管路18内进行降温,如此设置通过冷却管路17对壳体11内部进行降温,从而确
保动力模组100稳定有效运行。
65.而通过缠绕的方式将第一进水段171与第一出水段172设置在第二容纳空间164内,能够增大冷却管路17在第二容纳空间164内的长度,提高冷却介质在冷却管路17内的流动距离和流动时间,提高冷却介质在第二容纳空间164内的换热效果。
66.而第一进水段171与第一出水段172在转子13转动的轴向上交替设置,使得冷却管路17的进水口和出水口能够并列设置,能够方便冷却管路17在第二容纳空间164内的排布设置。
67.进一步地,在本技术的一些实施例中,支撑壁161和管路防护壁162共同围成冷却通道,即可以将上述实施例中的第二容纳空间164作为冷却通道,且冷却介质可以在该冷却通道内有序流动,以便对壳体11的内部进行降温。
68.进一步地,散热管路18包括:第二进水段181和第二出水段182。
69.其中,第二进水段181与第二出水段182至少部分盘绕于壳体11外周,第二进水段181与第二出水段182在转子13转动的轴向上交替设置,第二进水段181和第二出水段182通过紧固件连接或粘接方式、或同时采用紧固件连接和粘接方式与壳体11固定。由此,一方面能够保证散热管路18在动力模组100上的固定连接,且散热管路18的进水口和出水口能够并列设置,能够方便散热管路18在壳体11外周的排布设置。另一方面能够增大散热管路18在壳体11外周的长度,提高提高冷却介质在散热管路18内的流动距离和流动时间,保证冷却介质在动力模组100外的热交换效果,使冷却介质能够充分放热。
70.而第二进水段181的起始端与第一出水段172的末端连通,第二进水段181的末端与第二出水段182的起始端连通,第二出水段182的末端与第一进水段171的起始端连通。在这样的结构下,冷却管路17与散热管路18形成单向导通的封闭回路,使冷却介质能够在回路中循环流动,实现对动力模组100内的持续散热。
71.具体地,动力模组100还包括:连接管19。连接管19可拆卸地连接于第一出水段172的末端与第二进水段181的起始端,或可拆卸地连接于第一进水段171的起始端与第二出水段182的末端,或同时可拆卸地连接于第一出水段172的末端与第二进水段181的起始端和第一进水段171的起始端与第二出水段182的末端。在这样的结构下,通过将连接管19拆卸,可方便地实现对冷却管路17和散热管路18内添加或更换冷却介质等操作,使动力模组100的使用更为方便。
72.在一些实施例中,如图1和图3所示,动力模组100还包括第二端盖20,第二端盖20盖设于壳体11的第二开口112,通过第二端盖20封闭第二开口112,能够防止壳体11外的灰尘等杂质进入壳体11内对动力模组100的功能产生影响。而第一出水段172的末端与第一进水端的起始端伸出第二端盖20,使冷却管路17与散热管路18的连接位置位于第二端盖20朝向壳体11外的一侧,当需要拆卸散热管路18或向冷却管路17中添加冷却介质时,无需拆卸第二端盖20,操作较为方便。
73.进一步地,壳体11的第二开口112处还凸设有环形壁113,第一出水段172的末端与第一进水端的起始端穿过环形壁113,伸出壳体11。由此,第一出水段172的末端与第一进水段171的起始端在环形壁113内具有一定长度,使得第一出水段172和第一进水段171在环形壁113处的固定更为稳固。此外,冷却管路17与散热管路18的连接位置位于壳体11外,当需要拆卸散热管路18或向冷却管路17中添加冷却介质时,在壳体11外即可完成,无需拆卸壳
体11,操作较为方便。
74.需要说明的是,当动力模组100设有连接管19时,连接管19可根据使用需求设置在相对第二端盖20的不同位置。例如,在图1的示例中,连接管19设置在第二端盖20的远离壳体11的一侧,此时,连接管19位于动力模组100的外侧,对连接管19的拆卸较为方便,不需要将第二端盖20从壳体11上拆下。又例如,在图5的示例中,连接管19设置在第二端盖20与壳体11之间,此时,连接管19穿设在环形壁113上,连接管19的一部分穿过环形壁113伸出动力模组100的外侧在这样的结构下,环形壁113对连接管19具有固定作用,且连接管19部分位于动力模组100内,不易受到损坏,能够降低连接管19的故障率,而连接管19的部分设置于动力模组100内,也能够使动力模组100的结构更为紧凑,有利于减小动力模组100的体积。
75.在一些实施例中,如图1所示,转子支架131还设有凸起环1311,管路防护壁162还设有抵接环1621,管路防护壁162的抵接环1621和转子支架131的凸起环1311之间通过转子轴承133转动连接。由此,通过抵接环1621与凸起环1311的配合,管路防护壁162对转子支架131起到限位的作用,能够减少转子支架131在转子13转动的径向晃动,而抵接环1621与凸起环1311之间通过转子轴承133转动连接,能够减小抵接环1621与凸起环1311之间的摩擦力。
76.进一步地,动力模组100还包括:限位件21,限位件21设置于管路防护壁162上且至少部分与冷却管路17在转子13转动的轴向上正对,限位件21用于防止冷却管路17发生位移。由此,限位件21能够将冷却管路17的一部分限定在第二容纳空间164内,防止冷却管路17从第二容纳空间164内脱出,保证冷却管路17在第二容纳空间164内的热交换效果。同时,限位件21对冷却管路17在第二容纳空间164内的固定起到补充作用,提高冷却管路17固定的牢固性。
77.在一些实施例中,如图1所示,转子支架131还设有中心凸轴1312,中心凸轴1312与凸起环1311之间形成有第三容纳空间1313,在第三容纳空间1313内设有第一感测件22,减速机构14包括行星架143,在行星架143上设有第一磁性件1431,且与第一感测件22间隔相对设置。
78.需要补充的是,法兰盘15连接在减速机构14背离转子支架131的一端,法兰盘15的中心轴线与壳体的中心轴线重合,法兰盘15绕着壳体的中心轴线转动。法兰盘15的形状是圆盘状。法兰盘15作为动力模组100的最终输出部件,以及作为下一级部件的输入部件。由于多个行星轮安装在行星架143上,齿圈与行星轮啮合,法兰盘15通过销轴与行星架143固定连接,如此设置使得法兰盘15与行星架143配合将行星轮夹在齿圈中。
79.具体地,中心凸轴1312朝向背离减速机构14的方向凸起,中心凸轴1312与凸起环1311间隔设置,中心凸轴1312的中心轴线与转子支架131的中心轴线重合。在转子支架131的轴向方向,中心凸轴1312和凸起环1311的凸起高度相等,中心凸轴1312和凸起环1311共同围成第三容纳空间1313,第一感测件22为霍尔元件,第一感测件22具有多个,多个第一感测件22间隔设置在第三容纳空间1313内,多个第一感测件22绕着转子支架131的中心轴线等角度均匀分布。多个第一感测件22随着转子支架131一起转动。行星架143为上述实施例中的行星架143,行星架143与壳体相对固定连接,第一磁性件1431为编码器磁铁,第一磁性件1431固定连接在行星架143上,沿着转子支架131的轴向方向,第一磁性件1431与第一感测件22相对设置,第一磁性件1431相对第一感测件22固定不动,如此设置通过第一感测件
22和第一磁性件1431的共同配合以检测转子支架131的转动圈数。
80.进一步地,第二磁性件1314为编码器磁铁,第二磁性件1314固定设置在中心凸轴1312背离减速机构14的一端,第二磁性件1314随着转子支架131一起转动。第二感测件23为编码器芯片,第二感测件23和第二磁性件1314相对间隔设置,第二感测件23固定连接在电路板上,电路板固定连接在支撑部16上,第二磁性件1314相对第二感测件23转动,如此设置通过第二磁性件1314和第二感测件23共同配合以检测转子支架131的转动角度,进而得出转子13的旋转角度。
81.由此,通过第一感测件22和第二感测件23得到的数据,较准确的得到转子13的转动圈数和角度,有利于准确地控制转子13的转动,从而检测和控制动力模组100的输出动力,使得动力模组100更好地驱动下一级部件。
82.在本技术中,第一感测件22和第二感测件23可设置为霍尔感应件。第一磁性件1431和第二磁性件1314分别为第一感测件22和第二感测件23提供磁场。第一磁性件1431和第二磁性件1314的形状能够设置为片状磁铁、块状磁铁或者是圆环状磁铁,本技术并不对第一磁性件1431和第二磁性件1314的具体形状做限制。
83.在图1的示例中,第一感测件22设置在第三容纳空间1313内,设有第二磁性件1314的电路板设置在第一感测件22远离转子支架131的一侧,能够充分利用壳体11内的空间,使动力模组100的内部结构更为紧凑。
84.如图6所示,根据本实用新型实施例的机器人1000,主体和与主体连接的动力模组100。动力模组100为上述实施例中的任意一项的动力模组100。
85.可以理解的是,在图6的示例中,机器人1000的多个机械腿200通过动力模组100连接在主体300上,机械腿200与动力模组100一一对应设置,动力模组100为机械腿200相对主体300摆动提供动力。
86.本技术的机器人1000,通过采用上述实施例中的任意一项的动力模组100,动力模组100具有较好的散热,能够保证机器人1000的动力供应较为可靠,从而提高机器人1000整体的功能可靠性。
87.根据本实用新型实施例的动力模组100及具有其的机器人1000的其他构成以及操作对于本领域普通技术人员而言都是已知的,这里不再详细描述。
88.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
89.尽管已经示出和描述了本实用新型的实施例,本领域的普通技术人员可以理解:在不脱离本实用新型的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。