1.本技术涉及气腹机技术领域,特别是涉及一种气腹机的控制方法及气腹机。
背景技术:
2.气腹机为向一个检测腔输出一定压力的co2气体的医用设备。当达到预定目标压力时,气腹机能自动停止进气,并维持一定量的气体使检测腔一直处于预定的压力充气状态,使得检测腔内压力保持在一个恒定的数值。
3.当检测腔内的压力由于过充或其他因素高于设定压力时,气腹机也能够及时的进行泄压以保持压力在恒定水平。当气腹机输出的气体流量达到预定流量时,气腹机能够维持在预定流量下进行充气,当气腹机输出的气体流量不等于预定流量时气腹机能够通过调节输出的气体流量使得输出的气体流量达到预定流量。可见,气腹机需要具有稳定的压力控制和流量控制方法。
4.传统的气腹机控制方法较为单一,仅仅通过反馈控制来控制气腹机输出的压力及流量,控制效果一般,且抗扰能力以及抗扰恢复能力较差,气腹机输出的压力及流量容易受到外界环境因素的影响。
技术实现要素:
5.基于此,有必要针对传统气腹机的控制方法的抗扰能力以及抗扰恢复能力较差,气腹机输出的压力及流量容易受到外界环境因素影响的问题,提供一种气腹机的控制方法。
6.一方面,本技术提供一种气腹机的控制方法,
7.所述方法包括:
8.获取输气管道内的气压值,以及获取预设目标气压值,计算预设目标气压值与输气管道内的气压值的差值,将该差值作为当前气压偏差值;
9.从数据库中获取历史气压偏差值,将当前气压偏差值和历史气压偏差值的差值作为气压偏差值变化率;
10.依据当前气压偏差值和气压偏差值变化率进行模糊计算,生成比例控制参数、积分控制参数和微分控制参数;
11.依据比例控制参数、积分控制参数和微分控制参数生成pwm电压脉冲信号;
12.将pwm电压脉冲信号发送至比例阀,依据所述pwm电压脉冲信号调整比例阀的开度。
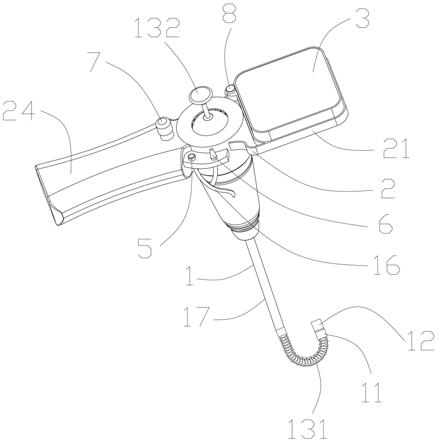
13.另一方面,本技术还提供一种气腹机,所述气腹机包括:
14.气腹机本体;
15.输气管道;
16.气腹针,所述输气管道设置于气腹机本体和气腹针之间;
17.比例阀,设置于输气管道之上;
18.压力传感器,设置于输气管道的内壁;
19.所述气腹机本体包括主控制器、模糊控制器和pid控制器,所述主控制器用于执行如前述内容提及的气腹机的控制方法。
20.本技术涉及一种气腹机的控制方法及气腹机,其中,本技术提供的气腹机的控制方法,通过获取输气管道内的气压值与预设目标气压值的偏差值,作为气压偏差值,以及获取气压偏差值和历史气压偏差值的差值作为气压偏差值变化率,在模糊控制器中经过气压偏差值及气压偏差值变化率的模糊化,对比例控制参数、积分控制参数和微分控制参数三个pid控制参数进行模糊推理,解模糊等步骤,输出pid控制器的比例控制参数、积分控制参数和微分控制参数三个pid控制参数,进一步将这三个pid控制参数输入pid控制器中,以使pid控制器调节pwm参数改变,进而完成后续的控制,生成pwm电压脉冲信号调整比例阀的开度。基于模糊pid的pwm电流控制的方式,克服了传统pid控制无法实时调整pid参数的缺点,提高了整个系统的抗扰性能,能够对对输出压力和流量实时地进行连续成比例无间断的控制调节,进而达到恒压变流稳定供气的目的,控制效果好。
附图说明
21.图1为本技术一实施例提供的气腹机的控制方法的流程示意图。
22.图2为本技术一实施例提供的气腹机的结构示意图。
23.图3为本技术另一实施例提供的气腹机的结构示意图。
具体实施方式
24.为了使本技术的目的.技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
25.一方面,本技术提供一种气腹机的控制方法。需要说明的是,本技术提供的气腹机的控制方法应用于气腹机的压力实验,气腹机的气腹针伸入的检测腔为塑胶模型。所述检测腔具体为密封性较好的塑胶材料制成的一个具有空腔的腔体。
26.此外,本技术提供的气腹机的控制方法不限制其执行主体。可选地,本技术提供的气腹机的控制方法的执行主体可以为一种气腹机。具体地,本技术提供的气腹机的控制方法的执行主体可以为所气腹机中的气腹机本体中的主控制器。
27.气腹机本体包括主控制器、模糊控制器和pid控制器,主控制器与模糊控制器连接,主控制器与pid控制器连接,pid控制器与比例阀连接。
28.如图1所示,在本技术的一实施例中,所述气腹机的控制方法包括:
29.s100,获取输气管道内的气压值,以及获取预设目标气压值,计算预设目标气压值与输气管道内的气压值的差值,将该差值作为当前气压偏差值。
30.具体地,输气管道内设置有压力传感器,压力传感器实时获取输气管道内的气压值返回至气腹机主体内的主控制器。主控制器再获取本地数据库存车的预设目标气压值,将预设目标气压值与输气管道内的气压值做差,将差值作为当前气压偏差值,记为e。
31.s200,从数据库中获取历史气压偏差值,将当前气压偏差值和历史气压偏差值的差值作为气压偏差值变化率。
32.具体地,历史气压偏差值为上一次执行s100得到的“当前气压偏差值”。上一次即与当前系统时间距离最近的一个执行s100的时间节点。
33.将当前气压偏差值和历史气压偏差值的差值作为气压偏差值变化率,记为ec。
34.s300,依据当前气压偏差值和气压偏差值变化率进行模糊计算,生成比例控制参数、积分控制参数和微分控制参数。
35.具体地,主控制器将计算得到的当前气压偏差值和气压偏差值变化率输入至模糊控制器,控制模糊控制器计算比例控制参数、积分控制参数和微分控制参数。比例控制参数记为kp,积分控制参数记为ki,微分控制参数记为kd。
36.s400,依据比例控制参数、积分控制参数和微分控制参数生成pwm电压脉冲信号。
37.具体地,比例控制参数,积分控制参数和微分控制参数是三个pid控制参数,将这三个pid控制参数输入到pid控制器中,pid控制器控制pwm(pulse width modulation,脉冲宽度调制)的占空比、周期等参数,进而控制电流的大小,控制电流调整比例阀的输出流量的大小,根据比例阀输出流量与压力的正比关系进而达到改变气腹机输出气压的大小的目的。
38.s500,将pwm电压脉冲信号发送至比例阀,依据所述pwm电压脉冲信号调整比例阀的开度。
39.具体地,比例阀接收的是占空比可变的pwm电压脉冲信号,这个平均电压除比例阀的线圈电阻就是线圈电流值,最终通过线圈电流值产生电磁力,使比例阀的阀芯动作,从而比例阀的开度产生变化。
40.本实施例中,通过获取输气管道内的气压值与预设目标气压值的偏差值,作为气压偏差值,以及获取气压偏差值和历史气压偏差值的差值作为气压偏差值变化率,在模糊控制器中经过气压偏差值及气压偏差值变化率的模糊化,对比例控制参数、积分控制参数和微分控制参数三个pid控制参数进行模糊推理,解模糊等步骤,输出pid控制器的比例控制参数、积分控制参数和微分控制参数三个pid控制参数,进一步将这三个pid控制参数输入pid控制器中,以使pid控制器调节pwm参数改变,进而完成后续的控制,生成pwm电压脉冲信号调整比例阀的开度。基于模糊pid的pwm电流控制的方式,克服了传统pid控制无法实时调整pid参数的缺点,提高了整个系统的抗扰性能,能够对对输出压力和流量实时地进行连续成比例无间断的控制调节,进而达到恒压变流稳定供气的目的,控制效果好。
41.在本技术的一实施例中,所述s300包括:
42.s310,依据预设目标气压值设置压力偏差值模糊范围。
43.具体地,可选地,作为一种可选的实施方式将预设目标气压值作为压力偏差值模糊范围的最大边界值,将预设目标气压值的负值作为压力偏差值模糊范围的最小边界值。
44.例如,预设目标气压值为12mmhg(毫米汞柱,是气压常用的单位之一),那么可以设置压力偏差值模糊范围为大于等于-12mmhg且小于等于12mmhg,记为[-12,12]。
[0045]
s320,在压力偏差值模糊范围内等距地截取n个边界值点,依据n个边界值点创建n 1个压力偏差值模糊子范围。n为大于或等于1的正整数。
[0046]
具体地,承接上述例子,压力偏差值模糊范围为[-12,12],那么在压力偏差值模糊范围内等距地截取n个边界值点。
[0047]
在本技术的一实施例中,n为7。
[0048]
具体地,那么压力偏差值模糊范围为[-12,12],n为7的条件下,取7个边界值点分别为-12,-8,-4,0,4,8和12。那么就会创建8个压力偏差值模糊子范围,分别为[-∞,-12],[
‑‑
12,-8],[-8,-4],[-4,0],[0,4],[4,8],[8,12]和[12, ∞]。
[0049]
进一步地,将每一个边界值点作为一个压力偏差值模糊子集,且对每一个压力偏差值模糊子集编序号,那么就会得到7个压力偏差值模糊子集:序号nb,为-12。序号nm,为-8。序号ns,为-4。序号ze,为0。序号ps,为4。序号pm,为8。序号pb,为12。
[0050]
s330,基于当前气压偏差值和气压偏差值变化率,利用模糊化算法计算比例控制参数在压力偏差值模糊范围中各个边界值点上的隶属度,筛选不为0的隶属度作为比例控制参数模糊隶属度,得到至少一个比例控制参数模糊隶属度。
[0051]
具体地,承接上述实施例,本步骤是根据当前气压偏差值和气压偏差值变化率,利用模糊化算法计算比例控制参数在[-12,12]中的各边界值点上的隶属度,实际就是计算比例控制参数在nb,nm,ns,ze,ps,pm和pb这7个边界值点上的隶属度。
[0052]
根据这个步骤,我们可以获得比例控制参数在nb,nm,ns,ze,ps,pm和pb上的分布情况。
[0053]
s340,通过测试调参得到比例控制参数的测试参数范围,作为比例测试参数范围。
[0054]
具体地,测试调参是一种测试方法,其得到的比例测试参数范围等于一种“理论”的参数范围。
[0055]
s350,基于至少一个比例控制参数模糊隶属度和比例测试参数范围,利用解模糊算法得到比例控制参数。
[0056]
具体地,
[0057]
本步骤等同于将实测的情形(至少一个比例控制参数模糊隶属度)和理论的情形(比例测试参数范围)相互耦合,最终得到比例控制参数。积分控制参数的计算方法同s310-s350。微分控制参数的计算方法同s310-s350。
[0058]
在本技术的一实施例中,在s320之后,在s330之前,所述s300还包括:
[0059]
s321,将每一个边界值点作为一个压力偏差值模糊子集。
[0060]
具体地,压力偏差值模糊范围为[-12,12],n为7的条件下,取7个边界值点分别为-12,-8,-4,0,4,8和12。那么-12,-8,-4,0,4,8和12为7个压力偏差值模糊子集。每一个边界值点都是一个压力偏差值模糊子集
[0061]
s322,获取序号集合{v1,v2,v3...vm},序号集合内包含多个序号,且多个序号在序号集合中按预设顺序排列。m为序号的总数量。
[0062]
具体地,创建序号集合{v1,v2,v3...vm}。例如,v1使用nb,v2使用nm,v3使用ns,以此类推,一种实施方式下,得到序号集合{nb,nm,ns,ze,ps,pm,pb...}。可以看到预设顺序就是nb-nm-ns-ze-ps-pm-pb...这个排列顺序。
[0063]
s323,将压力偏差值模糊范围内的n个边界值点依照边界值从小到大的顺序排序,并依照从小到大的顺序依次赋予每一个边界值点一个序号,且依照所述预设顺序赋予序号。
[0064]
具体地,本步骤具体执行时,例如依照从小到大的顺序将7个边界值排序,得到-12,-8,-4,0,4,8和12,然后在依照预设顺序nb-nm-ns-ze-ps-pm-pb...进行赋予序号,那么就得到-12(nb),-8(nm),-4(ns),0(ze),4(ps),8(pm)和12(pb)。
[0065]
s324,将赋予压力偏差值模糊范围内每一个边界值点的序号作为模糊子集序号。
[0066]
具体地,例如nb就是边界值点-12的模糊子集序号。
[0067]
在本技术的一实施例中,所述s330包括:
[0068]
s331,获取多个压力偏差值模糊子范围,将当前气压偏差值与多个压力偏差值模糊子范围逐一匹配,得到当前气压偏差值所归属的压力偏差值模糊子范围,将当前气压偏差值所归属的压力偏差值模糊子范围作为第一命中模糊子范围。
[0069]
具体地,本实施例介绍利用模糊化算法计算比例控制参数在压力偏差值模糊范围中各个边界值点上的隶属度的具体实施方式。
[0070]
通过本步骤s331获取前述内容得到的多个压力偏差值模糊子范围。
[0071]
承接上述实施例,就是获取[-∞,-12],[
‑‑
12,-8],[-8,-4],[-4,0],[0,4],[4,8],[8,12]和[12, ∞]。
[0072]
进一步将当前气压偏差值与这些压力偏差值模糊子范围逐一匹配,得到当前气压偏差值所归属的压力偏差值模糊子范围,将当前气压偏差值所归属的压力偏差值模糊子范围作为第一命中模糊子范围。
[0073]
例如,当前气压偏差值为6hhmg,那么当前气压偏差值所归属的压力偏差值模糊子范围为[4,8],即第一命中模糊子范围为[4,8]。
[0074]
s332,获取第一命中模糊子范围包含的两个压力偏差值模糊子集。
[0075]
具体地,前述内容已经划分了压力偏差值模糊子集包括nb(-12),nm(-8,ns(-4),ze(0),ps(4),pm(8)和pb(12)。可以理解,获取第一命中模糊子范围包含的两个压力偏差值模糊子集,第一命中模糊子范围为[4,8]包含的两个边界值点为4和8,那么第一命中模糊子范围包含的两个压力偏差值模糊子集分别为ps(4)和pm(8)。
[0076]
s333,依据第一命中模糊子范围包含的两个压力偏差值模糊子集,以及当前气压偏差值,计算当前气压偏差值在每一个压力偏差值模糊子集上的隶属度,将得到的不为0的隶属度纳入当前气压偏差值隶属度模糊集合。
[0077]
具体地,本步骤是计算当前气压偏差值6hhmg在ps(4)的隶属度,以及当前气压偏差值6hhmg在ps(4)的隶属度在pm(8)的隶属度,如果得到的隶属度为0就丢弃,将得到的不为0的隶属度纳入当前气压偏差值隶属度模糊集合。
[0078]
s334,将气压偏差值变化率与多个压力偏差值模糊子范围逐一匹配,得到气压偏差值变化率所归属的压力偏差值模糊子范围,将气压偏差值变化率所归属的压力偏差值模糊子范围作为第二命中模糊子集。
[0079]
具体地,本步骤和s331原理一致,区别在于本步骤是将气压偏差值变化率与多个压力偏差值模糊子范围[-∞,-12],[-12,-8],[-8,-4],[-4,0],[0,4],[4,8],[8,12]和[12, ∞]逐一匹配。
[0080]
s335,获取第二命中模糊子范围包含的两个压力偏差值模糊子集。
[0081]
具体地,本步骤和s332原理一致,此处不再赘述。
[0082]
s336,依据第二命中模糊子范围包含的两个压力偏差值模糊子集,以及气压偏差值变化率,计算气压偏差值变化率在每一个压力偏差值模糊子集上的隶属度,将得到的不为0的隶属度纳入气压偏差值变化率隶属度模糊集合。
[0083]
具体地,本步骤和s336原理一致,此处不再赘述。
[0084]
s337,从当前气压偏差值隶属度模糊集合和气压偏差值变化率隶属度模糊集合中各选取一个隶属度两两组成一个数组。
[0085]
具体地,例如当前气压偏差值隶属度模糊集合为{0.4,0.6},气压偏差值变化率隶属度模糊集合为{0.3,0.7}。0.4和0.3可以组成一个数组(0.4,0.3)。
[0086]
s338,反复执行所述s337,得到至少一个数组。
[0087]
具体地,组数组需要穷尽,即保证数组与数组之间对比后包含至少一个不同的元素。例如当前气压偏差值隶属度模糊集合为{0.4,0.6},气压偏差值变化率隶属度模糊集合为{0.3,0.7},那么得到的数组为(0.4,0.3),(0.4,0.7),(0.6,0.3),(0.6,0.7),一共4个数组。
[0088]
s339,调取模糊规则表,获取每一个数组在模糊规则表中对应的比例控制参数模糊隶属度,得到至少一个比例控制参数模糊隶属度。
[0089]
具体地,模糊规则表为一个预先设置的比例控制参数模糊隶属度的表格,可以根据每一个(气压偏差值隶属度,气压偏差值变化率隶属度)数组在表格中找到一个对应的比例控制参数模糊隶属度。因此数组如果是多个,那么会得到多个比例控制参数模糊隶属度。
[0090]
在本技术的一实施例中,所述s333包括:
[0091]
s333a,判断当前气压偏差值是否等于第一命中模糊子范围的最小边界值或第一命中模糊子范围的最大边界值。
[0092]
s333b,若当前气压偏差值等于第一命中模糊子范围的最小边界值或第一命中模糊子范围的最大边界值,则获取与最小边界值或最大边界值对应的压力偏差值模糊子集。
[0093]
s333c,将当前气压偏差值在与最小边界值或最大边界值对应的压力偏差值模糊子集上的隶属度记为1,并将该隶属度纳入当前气压偏差值隶属度模糊集合。
[0094]
具体地,例如当前气压偏差值为8hmmg,刚好等于[4,8]的最大边界值,而8这个边界值对应的压力偏差值模糊子集为pm,那么记录当前气压偏差值在pm的隶属度为1,将1纳入当前气压偏差值隶属度模糊集合,此时当前气压偏差值在nb(-12),nm(-8),ns(-4),ze(0),ps(4)和pb(12)上的隶属度都是0,隶属度为0不会纳入当前气压偏差值隶属度模糊集合。
[0095]
在本技术的一实施例中,在本技术的一实施例中,所述s333还包括:
[0096]
s333e,若当前气压偏差值不等于第一命中模糊子范围的最小边界值,同时也不等于第一命中模糊子范围的最大边界值,则获取与最小边界值对应的压力偏差值模糊子集,以及获取与最大边界值对应的压力偏差值模糊子集。
[0097]
s333f,分别计算当前气压偏差值在与最小边界值对应的压力偏差值模糊子集上的隶属度k1,以及当前气压偏差值在与最大边界值对应的压力偏差值模糊子集上的隶属度k2。
[0098]
s333g,将k1和k2均纳入当前气压偏差值隶属度模糊集合。
[0099]
具体地,例如当前气压偏差值为6hmmg,第一命中模糊子范围为[4,8],但是6即不等于最小边界值4,也不等于最大边界值8,因为6落在[4,8]中。因此,获取最小边界值4对应的压力偏差值模糊子集ps,和最小边界值8对应的压力偏差值模糊子集pm。计算当前气压偏差值6hmmg在ps上的隶属度k1,计算当前气压偏差值6hmmg在pm上的隶属度k2,将计算当前气压偏差值6hmmg在ps上的隶属度k1。
[0100]
在本技术的一实施例中,所述s333f包括:
[0101]
s333f1,依据公式1计算当前气压偏差值与最小边界值对应的压力偏差值模糊子集上的隶属度k1。
[0102][0103]
其中,k1为当前气压偏差值与最小边界值对应的压力偏差值模糊子集上的隶属度,e为当前气压偏差值,x为与最小边界值对应的压力偏差值模糊子集的模糊子集序号,y为与最大边界值对应的压力偏差值模糊子集的模糊子集序号,为最小边界值,为最大边界值。
[0104]
具体地,承接上述例子,当前气压偏差值e为6hmmg,x为ps,y为pm,那么那么
[0105]
s333f2,依据公式2计算当前气压偏差值与最大边界值对应的压力偏差值模糊子集上的隶属度k2。
[0106][0107]
其中,k2为当前气压偏差值与最大边界值对应的压力偏差值模糊子集上的隶属度,e为当前气压偏差值,x为与最小边界值对应的压力偏差值模糊子集的模糊子集序号,y为与最大边界值对应的压力偏差值模糊子集的模糊子集序号,为最小边界值,为最大边界值。
[0108]
具体地,承接上述例子,当前气压偏差值e为6hmmg,x为ps,y为pm,那么那么
[0109]
进一步地,在上述例子下,执行后续s333g,将k1和k2均纳入当前气压偏差值隶属度模糊集合,那么气压偏差值隶属度模糊集合为{0.5,0.5}。
[0110]
下面介绍下s339调取模糊规则表,获取每一个数组在模糊规则表中对应的比例控制参数模糊隶属度,得到至少一个比例控制参数模糊隶属度具体如何执行。
[0111]
例如,通过执行s331至s333得到的当前气压偏差值隶属度模糊集合为{e在ps的隶属度a,e在pm的隶属度1-a},通过执行后续s334至s336得到的气压偏差值变化率隶属度模糊集合为{ec在nm的隶属度b,ec在ns的隶属度1-b}。
[0112]
进一步地执行s337和s338,得到四个数组,分别为a1=(e在ps的隶属度a,ec在nm的隶属度b),a2=(e在ps的隶属度a,ec在ns的隶属度1-b),a3=(e在pm的隶属度1-a,ec在nm的隶属度b),a4=(e在pm的隶属度1-a,ec在ns的隶属度1-b)。进一步地执行s339。调取模糊规则表如表1所示。
[0113]
表1-模糊规则表
[0114][0115]
表1的每个单元格有3个序号,第一个序号是比例控制参数相关,第一个序号是积分控制参数相关,第一个序号是微分控制参数相关,例如第一列第一行对应的单元格pb/nb/ps,pb就是比例控制参数相关,nb就是积分控制参数相关,ps就是微分控制参数相关
[0116]
由于本实施例是计算比例控制参数,因此我们查询的是第一个序号。
[0117]
s339查上述表1可知,a1=(e在ps的隶属度a,ec在nm的隶属度b),其对应的列ps,行nm对应的单元格ps/ns/ze,其第一个序号为ps,那么得到第一比例控制参数模糊隶属度:比例控制参数在ps上的模糊隶属度为a
×
b。
[0118]
a2=(e在ps的隶属度a,ec在ns的隶属度1-b),其对应的列ps,行ns对应的单元格ze/ze/ze,其第一个序号为ze,那么得到第二比例控制参数模糊隶属度:比例控制参数在ze上的模糊隶属度为a
×
(1-b)。
[0119]
a3=(e在pm的隶属度1-a,ec在nm的隶属度b),其对应的列pm,行nm对应的单元格ze/ze/ns,其第一个序号为ze,那么得到第三比例控制参数模糊隶属度:比例控制参数在ze上的模糊隶属度为b
×
(1-a)。
[0120]
a4=(e在pm的隶属度1-a,ec在ns的隶属度1-b,其对应的列pm,行ns对应的单元格ns/ps/ps,其第一个序号为ns,那么得到第四比例控制参数模糊隶属度:比例控制参数在ns上的模糊隶属度为(1-a)
×
(1-b)。
[0121]
综合上述四个比例控制参数模糊隶属度,我们得到的结果是:
[0122]
比例控制参数在在ps上的模糊隶属度为a
×
b,比例控制参数在ze上的模糊隶属度为a
×
(1-b) b
×
(1-a),比例控制参数在ns上的模糊隶属度为(1-a)
×
(1-b)。
[0123]
上述内容我们提到过积分控制参数的计算方法同s310-s360。微分控制参数的计算方法同s310-s360。那么在具体计算积分控制参数执行执行s339时,查询的是表1里每个单元里的第二个序号。在具体计算微分控制参数执行执行s339时,查询的是表1里每个单元里的第三个序号。具体查表步骤不再赘述。
[0124]
在本技术的一实施例中,s360包括:
[0125]
s361,在比例测试参数范围内等距地截取n个边界值点。
[0126]
具体地,注意s361中的n与s320中的n相等。
[0127]
例如,得到比例测试参数范围是[-6,6]后,即大于等于-6小于等于6的范围,那么在s320中n取7的情况下,s361中n也取7,也得到了7个边界值点,分别为-6,-4,-2,0,2,4和6。
[0128]
s362,将每一个边界值点作为一个压力偏差值测试子集。
[0129]
具体地,与s321原理相同,-6,-4,-2,0,2,4和6为7个压力偏差值测试子集。每一个边界值点都是一个压力偏差值测试子集。
[0130]
s363,获取所述序号集合{v1,v2,v3...vm}。
[0131]
具体地,需要注意的是本步骤使用的序号集合和前述s322中使用的序号集合是完全一致的,因此在后续赋予序号时也使用完全相同的一套序号。
[0132]
s364,将比例测试参数范围内的n个边界值点依照边界值从小到大的顺序排序,并从小到大的顺序依次赋予每一个边界值点一个序号,且依照所述预设顺序赋予序号。
[0133]
具体地,前述s323使用的是序号集合{nb,nm,ns,ze,ps,pm,pb...},预设顺序是nb-nm-ns-ze-ps-pm-pb...,那么本步骤也必须使用相同的序号集合{nb,nm,ns,ze,ps,pm,pb...},使用相同的预设顺序nb-nm-ns-ze-ps-pm-pb...,进行赋予序号,保证对齐。
[0134]
本步骤具体执行时,和s323原理相同,依照从小到大的顺序将7个边界值排序,得到-6,-4,-2,0,2,4和6,然后在依照预设顺序nb-nm-ns-ze-ps-pm-pb...进行赋予序号,那么就得到-6(nb),-4(nm),-2(ns),0(ze),2(ps),4(pm)和6(pb)。
[0135]
s365,将赋予比例测试参数范围内每一个边界值点的序号作为测试子集序号。
[0136]
具体地,例如nb就是边界值点-6的测试子集序号。本步骤和s324的原理一致。
[0137]
在本技术的一实施例中,s360还包括:
[0138]
s366,获取每一个比例控制参数模糊隶属度所归属的压力偏差值模糊子集的模糊子集序号,得到多个模糊子集序号。
[0139]
具体地,承接前述例子查表得到的结果,比例控制参数在在ps上的模糊隶属度为a
×
b,比例控制参数在ze上的模糊隶属度为a
×
(1-b) b
×
(1-a),比例控制参数在ns上的模糊隶属度为(1-a)
×
(1-b),那么就获取到三个模糊子集序号ps,ze和ns。
[0140]
s367,搜寻与每一个模糊子集序号相同的测试子集序号,得到多个测试子集序号。。
[0141]
具体地,本步骤指的是我们也需要找到三个测试子集序号ps,ze和ns,分别和三个模糊子集序号相等,表示对齐,方便后续获取测试子集序号对应比例测试参数范围内的的边界值。
[0142]
s368,获取与每一个测试子集序号对应的比例测试参数范围内的边界值。。
[0143]
具体地,由于比例测试参数范围内的边界值点的情况是:-6(nb),-4(nm),-2(ns),0(ze),2(ps),4(pm)和6(pb),那么本步骤获取到ps对应的边界值2,ze对应的边界值0,ns对应的边界值-2。
[0144]
s369,依据公式3计算比例控制参数。
[0145]kp
=o
v1
×uv1
o
v2
×uv2
... o
vm
×uvm
ꢀꢀꢀ
公式3。
[0146]
其中,kp为比例控制参数,vm为模糊子集序号,o
vm
为在模糊子集序号vm的压力偏差值模糊子集上的比例控制参数模糊隶属度,u
vm
为与模糊子集序号相同的测试子集序号对应的比例测试参数范围内的边界值。
[0147]
具体地,s366至s367,是将模糊子集序号和测试子集序号对齐的步骤。
[0148]
承接上述例子,综合上述四个比例控制参数模糊隶属度,我们得到的结果是:
[0149]
比例控制参数在在ps上的比例控制参数模糊隶属度为a
×
b,比例控制参数在ze上的比例控制参数模糊隶属度为a
×
(1-b) b
×
(1-a),比例控制参数在ns上的比例控制参数
模糊隶属度为(1-a)
×
(1-b)。
[0150]
而比例控制参数在ps对应的边界值2,ze对应的边界值0,ns对应的边界值-2。
[0151]
那么最终根据公式3计算得出:
[0152]kp
=o
ps
×ups
o
ze
×uze
o
ns
×uns
,
[0153]
即kp=ab
×
2 [a(1-b) b(1-a)]
×
0 [(1-a)
×
(1-b)]
×
(-2)。
[0154]
本技术还提供一种气腹机。
[0155]
如图2所示,在本技术的一实施例中,所述气腹机包括气腹机本体100、输气管道200、气腹针300、比例阀400和压力传感器500。
[0156]
所述气腹机本体100包括主控制器110、模糊控制器120和pid控制器130,所述主控制器110用于执行前述任意一个实施例中提及的气腹机的控制方法。
[0157]
具体地,主控制器110与模糊控制器120连接,主控制器110与pid控制器130连接,pid控制器110与比例阀连接400。
[0158]
在本技术的另一实施例中,所述气腹机还包括气源600,如图3所示,气源600与所述气腹机本体100连接。所述气源600可以为盛装有co2气体的气瓶。
[0159]
气源600内的co2气体输送至气腹机本体100后,再输送入输气管道200,通过pid控制器130采用前述任意一个实施例中提及的气腹机的控制方法来控制比例阀400的开度,从而控制气腹机的输出流量和输出气压。
[0160]
以上所述实施例的各技术特征可以进行任意的组合,各方法步骤也并不做执行顺序的限制,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0161]
以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。