1.本发明主要涉及液位测量领域,尤其涉及一种密闭容器液位测量装置及基于该装置的密闭容器液位测量方法。
背景技术:
2.当前工作中,有需要对密闭容器内液位高度进行测量,以用于知晓密闭容器内液位的高度、容积剩余多少等。现有技术中,对密闭容器内液位测量作业存在以下技术问题:
3.一、现有部分传统液位测量装置或方法往往利用连通器原理或采用浮子、压力和电容等传感器测量液位。连通器原理测液位仅能应用于具备连通器的特定结构容器。浮子、压力和电容等传感器测液位,如cn207528298u专利,需在容器内部布置传感器,存在传感器被浆液腐蚀或裹挟而影响传感器寿命和测量精度的风险。
4.二、目前的红外热成像原理测液位系统,如cn206330648u专利,仅能被动根据待测容器气液相温度差测量容器液位,如果气液相温度差较小或容器壁过厚,则测量结果不够准确,甚至无法识别液位信息。尤其是设立在一些室外温度低地区的密闭容器,对其测量时精度更差。
5.三、目前的红外热成像原理测液位系统,如申请号为202011087039.3的专利,需要容器上端具备通口,无法应用于挥发性溶液或其它需要密闭的容器,不能真正实现远距离非接触实时测量。
6.四、当前密闭容器的结构多种多样,从结构形式上说,例如有圆球状的容器、圆柱状的容器、方体箱式状的容器;从大小体积上来说,有小型容器(例如小罐体)、有例如火车车厢大小的中型容器(例如大型罐式运输拖挂车)、还有十多米高甚至数十米高的大型容器(例如液化石油存储系统、大型水务系统)。不同结构形式的容器在实际测量作业中会衍生出不同的问题,尤其是不同的高度体积的容器,例如很高的容器就非常不好测量。而目前的密闭容器液位测量装置功能单一,不能够对这些不同结构形式、不同大小的容器进行液位测量。
技术实现要素:
7.本发明要解决的技术问题是克服现有技术的不足,提供一种结构简单紧凑、便于制作和使用、能适应不同结构形式不同大小的密闭容器、能不接触密闭容器内部、测量精度高的密闭容器液位测量装置及基于该装置的密闭容器液位测量方法。
8.为解决上述技术问题,本发明采用以下技术方案:
9.一种密闭容器液位测量装置,包括相配合的红外热像仪和可变形加热器,所述可变形加热器上设有固定组件,所述可变形加热器包括多块依次铰接的保温板用于形成多关节长条状的可变形加热器的结构主体、以使可变形加热器能适应被测容器的外壁面走势并通过固定组件固定于被测容器的外壁面上;所述可变形加热器的内侧沿轴向还设有加热组件、用于对被测容器的外壁加热以使红外热像仪对加热区进行观测后进行液位识别。
10.作为本发明的进一步改进,每块所述保温板的内侧面上和外侧面上均设有安装环,所述可变形加热器的内侧通过多个安装环活动穿设有一根沿轴向布置的内驱动绳、且外侧通过多个安装环活动穿设有一根沿轴向布置的外驱动绳,处于最后一块的保温板上还设有双松弛致动器,所述内驱动绳和外驱动绳的首部均和首块保温板上的首个安装环限位连接、且内驱动绳和外驱动绳的尾部均和双松弛致动器连接,作业时所述双松弛致动器根据被测容器的外壁面走势同时驱动内驱动绳和外驱动绳一松一紧、以用于驱动多关节长条状的可变形加热器发生形变。
11.作为本发明的进一步改进,所述保温板设有拱起的弧形部用于形成加热聚温腔,所述加热组件设于弧形部内,所述弧形部的两侧均设有平面部,所述固定组件设于平面部上。
12.作为本发明的进一步改进,所述平面部上的首尾两端均设有凸出的铰接座,相邻两个保温板通过铰接座和穿设于两个铰接座内的旋转轴形成铰接。
13.作为本发明的进一步改进,所述固定组件包括多个电连接的电磁铁、用于通电后使可变形加热器吸附于被测容器的外壁面上。
14.作为本发明的进一步改进,相邻两块保温板之间的连接缝隙的外侧面上还盖设有一块隔热板、以用于加热作业时减少热量从连接缝隙处流失,所述隔热板通过螺钉固定于其中一块保温板的外侧面上。
15.作为本发明的进一步改进,所述加热组件包括长条螺纹状的电热丝,每块所述保温板的内侧面上均设有固定件、以用于固定电热丝。
16.作为本发明的进一步改进,处于最后一块的保温板上还设有控制器,所述控制器分别和固定组件、加热组件和双松弛致动器连接、以用于供电并进行控制。
17.作为本发明的进一步改进,还设有蠕动式吸附机器人和遥控器,所述蠕动式吸附机器人和首块保温板可拆卸连接、用于连接后带动可变形加热器移动至被测容器的作业面后再使可变形加热器进行变形、固定和加热作业,所述遥控器用于控制蠕动式吸附机器人移动、并用于控制固定组件、加热组件和双松弛致动器作业。
18.一种基于上述任意所述的密闭容器液位测量装置的密闭容器液位测量方法,先将可变形加热器竖向的放置于被测容器的外壁面上;然后调整可变形加热器使可变形加热器适应被测容器的外壁面走势并通过固定组件固定于被测容器的外壁面上;然后打开加热组件对被测容器的外壁加热;加热结束后移开可变形加热器,此时由于被测容器内部液体和气体吸热效能不同,造成被测容器加热区的表面温度呈现显著差异;然后通过红外热像仪对加热区进行观测,此时观测到的温度梯度最大的位置即为被测容器内部液位。
19.与现有技术相比,本发明的优点在于:
20.一是本发明的密闭容器液位测量装置,利用包括相配合的红外热像仪和可变形加热器,无需再打开密闭容器,也无需使测量装置和容器内存储物相接触,大大提高了测量的安全性,降低了测量风险,既保护了测量装置又保护了密闭容器和容器内的存储物。
21.二是本发明的密闭容器液位测量装置,通过加热组件升温并对被测容器的外壁加热,造成容器表面在可变形加热器附近的温度呈现显著差异。此时再通过红外热像仪对加热区进行观测,观测精度高。完全解决了现有技术中由于容器壁过厚或者是气液相温度差小而造成的测量精度低的问题。
22.三是本发明的密闭容器液位测量装置,由于可变形加热器的结构主体由多块依次铰接的保温板构成,形成了多关节长条状的结构形式,使得长条状的可变形加热器的结构主体能够灵活的弯曲形变,进而很好的适应了各种不同结构形式的密封容器的外壁走势,使得本装置适用性、实用性强。并且长条状的可变形加热器能够形成长条的加热区,使得红外热像仪检测范围广,能够快速的检测处真实的液位。
23.四是本发明的密闭容器液位测量装置,通过双松弛致动器来驱动内驱动绳、外驱动绳,进而带动每一块保温板发生形变,使得每一块保温板能够自动贴合容器外壁,最终保证可变形加热器能够十分适应被测容器的外壁面走势并紧密的贴合在容器的外壁,进而使得后续的加热均匀,保证了测量的高精度,并且也大大降低了作业操作的难度。
24.五是本发明的密闭容器液位测量装置,保温板设有拱起的弧形部用于形成加热聚温腔,能够对加热组件的温度形成聚拢升温的效果,进而快速的对容器壁进行加热升温,即便是很厚的容器壁,依然可以快速的加热并造成容器表面在可变形加热器附近的温度呈现显著差异,进而保证了后期红外热像仪对加热区测量的高精度。
25.六是本发明的密闭容器液位测量装置,相邻两块保温板之间的连接缝隙的外侧面上还盖设有一块隔热板其既能够保证形变的实现,不会造成阻挡,同时还能够形成隔热,减少热量从连接缝隙处流失,进而保证了加热聚温腔内加热组件的温度形成聚拢升温的效果,进而能够快速的对容器壁进行加热升温。
26.七是本发明的密闭容器液位测量装置,通过设置可拆卸的蠕动式吸附机器人,使得本发明的装置适用范围进一步广。当被测容器为很高的容器时(例如户外大型直立式高罐体)、或者不方便人员操作的容器时,蠕动式吸附机器人可以带动可变形加热器移动至被测容器的任意作业面后再使可变形加热器进行变形、固定和加热作业,智能化程度极高,作业高效、安全。
27.八是本发明的密闭容器液位测量方法,操作方便快捷,无需再打开密闭容器,也无需使测量装置和容器内存储物相接触,大大提高了测量的安全性,降低了测量风险,既保护了测量装置又保护了密闭容器和容器内的存储物。同时该方法通过红外热像仪对加热区进行观测,观测精度高,完全解决了现有技术中的由于容器壁过厚或者是气液相温度差小而造成的测量精度低的问题。
附图说明
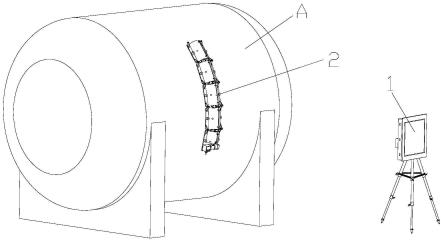
28.图1是本发明的密闭容器液位测量装置在对容器1使用时的立体结构原理示意图。
29.图2是本发明的密闭容器液位测量装置在对容器2使用时的立体结构原理示意图。
30.图3是本发明的密闭容器液位测量装置在对容器3使用时的侧视结构原理示意图。
31.图4是本发明的可变形加热器的正面结构原理示意图。
32.图5是本发明的可变形加热器的背面结构原理示意图。
33.图6是本发明的可变形加热器的局部立体结构原理示意图。
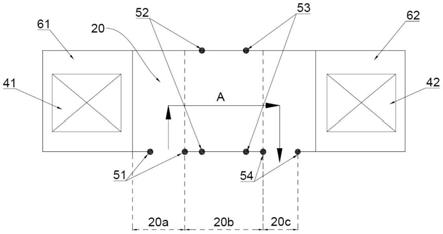
34.图7是本发明蠕动式吸附机器人的立体结构原理示意图。
35.图8是本发明的蠕动式吸附机器人和可变形加热器配合使用时的立体结构原理示意图。
36.图9是本发明的可变形加热器在对具体应用实施例中使用时的结构原理示意图1。
37.图10是本发明的可变形加热器在对具体应用实施例中使用时的结构原理示意图2。
38.图中各标号表示:
39.1、红外热像仪;2、可变形加热器;21、保温板;211、弧形部;212、平面部;213、铰接座;214、旋转轴;215、固定件;22、安装环;23、内驱动绳;24、外驱动绳;25、双松弛致动器;26、隔热板;27、控制器;3、固定组件;4、加热组件;5、蠕动式吸附机器人;51、负压吸附组件;52、万向蠕动轮组件;53、电源组件;54、驱动组件;55、中央控制组件;56、安装板。
具体实施方式
40.以下将结合说明书附图和具体实施例对本发明做进一步详细说明。
41.如图1至图10所示,本发明提供一种密闭容器液位测量装置,包括相配合的红外热像仪1和可变形加热器2,可变形加热器2上设有固定组件3,可变形加热器2包括多块依次铰接的保温板21用于形成多关节长条状的可变形加热器2的结构主体、以使可变形加热器2能适应被测容器(被测容器如图中的a所示)的外壁面走势并通过固定组件3固定于被测容器的外壁面上;可变形加热器2的内侧沿轴向还设有加热组件4、用于对被测容器的外壁加热以使红外热像仪1对加热区进行观测后进行液位识别。本发明的密闭容器液位测量装置能够适应不同形状的密闭容器,主动增强温差,确保即使被测容器的罐体较厚或罐内气液温差较小时也能通过红外热像仪1准确识别液位。具体实施原理如下:
42.如图1所示,当被测容器为呈卧式的圆柱体时,容器具有弧形的外壁。此时,将可变形加热器2竖向的放置在容器的外壁面上,由于可变形加热器2采用仿节肢动物设计,其结构主体由多块依次铰接的保温板21构成,形成了多关节长条状的结构形式,使得长条状的可变形加热器2的结构主体能够灵活的弯曲形变,进而很好的适应了容器的弧形外壁的走势,此时的可变形加热器2发生形变后呈“)”形,然后通过固定组件3固定于被测容器的外壁面上。固定后可变形加热器2的内侧的加热组件4升温并对被测容器的外壁加热,加热一定时间后,由于容器内部液体和气体吸热效能不同,造成容器表面在可变形加热器2附近的温度呈现显著差异。此时通过红外热像仪1对加热区进行观测,观测到的温度梯度最大的位置即为容器内部液位。
43.如图2所示,当被测容器为长方体箱式结构时,容器的外壁为平面。此时,将可变形加热器2竖向的放置在容器的外壁面上,可变形加热器2不用形变,正好贴合容器的外壁,然后通过固定组件3固定于被测容器的外壁面上。固定后可变形加热器2的内侧的加热组件4升温并对被测容器的外壁加热,加热一定时间后,由于容器内部液体和气体吸热效能不同,造成容器表面在可变形加热器2附近的温度呈现显著差异。此时通过红外热像仪1对加热区进行观测,观测到的温度梯度最大的位置即为容器内部液位。
44.如图3所示,当被测容器为异状结构。此时,将可变形加热器2竖向的放置在容器的下部的外壁面上,多关节长条状的可变形加热器2发生形变,正好贴合容器的下部的外壁,此时的可变形加热器2发生形变后大致呈“(”形,然后通过固定组件3固定于被测容器的外壁面上。固定后可变形加热器2的内侧的加热组件4升温并对被测容器的外壁加热,加热一定时间后,由于容器内部液体和气体吸热效能不同,造成容器表面在可变形加热器2附近的温度呈现显著差异。此时通过红外热像仪1对加热区进行观测,观测到的温度梯度最大的位
置即为容器内部液位。
45.通过以上特殊的科学设计,具有如下技术优点:
46.一是本发明的密闭容器液位测量装置,利用包括相配合的红外热像仪1和可变形加热器2,无需再打开密闭容器,也无需使测量装置和容器内存储物相接触,大大提高了测量的安全性,降低了测量风险,既保护了测量装置又保护了密闭容器和容器内的存储物。
47.二是本发明的密闭容器液位测量装置,通过加热组件4升温并对被测容器的外壁加热,造成容器表面在可变形加热器2附近的温度呈现显著差异。此时再通过红外热像仪1对加热区进行观测,观测精度高。完全解决了现有技术中由于容器壁过厚或者是气液相温度差小而造成的测量精度低的问题。
48.三是本发明的密闭容器液位测量装置,由于可变形加热器2的结构主体由多块依次铰接的保温板21构成,形成了多关节长条状的结构形式,使得长条状的可变形加热器2的结构主体能够灵活的弯曲形变,进而很好的适应了各种不同结构形式的密封容器的外壁走势,使得本装置适用性、实用性强。并且长条状的可变形加热器2能够形成长条的加热区,使得红外热像仪1检测范围广,能够快速的检测处真实的液位。
49.如图4至图6所示,进一步,在较佳实施例中,每块保温板21的内侧面上和外侧面上均设有安装环22,可变形加热器2的内侧通过多个安装环22活动穿设有一根沿轴向布置的内驱动绳23、且外侧通过多个安装环22活动穿设有一根沿轴向布置的外驱动绳24,处于最后一块的保温板21上还设有双松弛致动器25(现有技术中的产品),内驱动绳23和外驱动绳24的首部均和首块保温板21上的首个安装环22限位连接、且内驱动绳23和外驱动绳24的尾部均和双松弛致动器25连接,作业时双松弛致动器25根据被测容器的外壁面走势同时驱动内驱动绳23和外驱动绳24一松一紧、以用于驱动多关节长条状的可变形加热器2发生形变。如果可变形加热器2不能适应被测容器的外壁面走势并紧密的贴合在容器的外壁上,会衍生出两个问题:一是由于贴合不够导致固定组件3固定不够紧,可能在后期作业时发生装置掉落、砸伤人员和设备的风险;二是由于贴合不够,导致加热组件4升温加热不均匀或者容器壁加热不够,这将会大大影响后期红外热像仪1对加热区进行的观测精度,最终影响了液位测量结果。而通过以上特殊的科学设计,具有如下技术优点:
50.一是如果不这么设置,那么可以通过人工(用手、或者借助其他工具例如长杆)去使可变形加热器2发生形变。这无疑加工了人工作业负担,并且也不能保证可变形加热器2能够十分的贴合容器的外壁。而通过以上特殊结构的设置,以图1的容器为例,当将可变形加热器2竖向的放置在容器的外壁面上时,启动双松弛致动器25,此时双松弛致动器25会拉紧内驱动绳23并将外驱动绳24放松(也即内驱动绳23绳子变短、外驱动绳24绳子放长),此时在内驱动绳23的拉动作用下,变形加热器2发生朝左侧逐渐弯曲的形变,并最终适应了容器的弧形外壁的走势,此时的可变形加热器2发生形变后呈“)”形,然后通过固定组件3固定于被测容器的外壁面上。反之,当需要将可变形加热器2发生形变后呈“(”形时,此时双松弛致动器25会拉紧外驱动绳24并将内驱动绳23放松(也即外驱动绳24绳子变短、内驱动绳23绳子放长)。也即通过双松弛致动器25来驱动内驱动绳23、外驱动绳24,进而带动每一块保温板21发生形变,使得每一块保温板21能够自动贴合容器外壁,呈图3的状态,最终保证可变形加热器2能够十分适应被测容器的外壁面走势并紧密的贴合在容器的外壁,进而使得后续的加热均匀,保证了测量的高精度。
51.二是当容器高度过高,以图9、图10的容器为例,在本具体应用实施例中,例如操作人员举起双手的高度正好处于图中最底部的那块保温板21的高度时。此时如果要使操作人员拿着最顶部的那块保温板21来提着可变形加热器2来靠近容器外壁时,由于身高不够,势必要借助其他作业设备例如升降机等。而通过以上特殊结构的设置,操作人员可以利用双手只将最底部的那块保温板21靠紧在容器外壁上(此时状态如图9示所示),然后启动双松弛致动器25,此时此时双松弛致动器25会拉紧内驱动绳23并将外驱动绳24放松(也即内驱动绳23绳子变短、外驱动绳24绳子放长),然后变形加热器2逐渐立起(此时状态如图10示所示)并自动靠近左侧的容器外壁,并最终接粗外壁后贴合在外壁上(此时状态如图1示所示)。这大大降低了作业操作的难度。
52.如图4至图6所示,进一步,在较佳实施例中,保温板21设有拱起的弧形部211用于形成加热聚温腔,加热组件4设于弧形部211内,弧形部211的两侧均设有平面部212,固定组件3设于平面部212上。通过保温板21特殊的结构设计,既保证了固定组件3的可靠安装,两边均设置固定组件3也使得固定稳固;同时更重要的是形成了拱起的加热聚温腔,能够对加热组件4的温度形成聚拢升温的效果,进而快速的对容器壁进行加热升温,即便是很厚的容器壁,依然可以快速的加热并造成容器表面在可变形加热器2附近的温度呈现显著差异,进而保证了后期红外热像仪1对加热区测量的高精度。
53.如图4至图6所示,进一步,在较佳实施例中,平面部212上的首尾两端均设有凸出的铰接座213,相邻两个保温板21通过铰接座213和穿设于两个铰接座213内的旋转轴214形成铰接。这使得多块依次铰接的保温板21构成了多关节长条状的结构形式,使得长条状的可变形加热器2的结构主体能够灵活的弯曲形变,进而很好的适应了容器的弧形外壁的走势。并且使得本装置可以根据待测容器的大小,视情增加或减少保温板21的节数,来调整可变形加热器2的结构主体长度,适应性更强。
54.如图4至图6所示,进一步,在较佳实施例中,固定组件3包括多个电连接的电磁铁、用于通电后使可变形加热器2吸附于被测容器的外壁面上。在其他实施例中,还可以将固定组件3设置为多个负压吸附盘,当贴合到位后,负压吸附盘开始负压吸附使得可变形加热器2固定在容器外壁上。
55.如图6所示,进一步,在较佳实施例中,相邻两块保温板21之间的连接缝隙的外侧面上还盖设有一块隔热板26、以用于加热作业时减少热量从连接缝隙处流失,图6中仅示出一块隔热板26。隔热板26通过螺钉固定于其中一块保温板21的外侧面上。由于要实现多角度的灵活的弯曲形变,使得相邻两块保温板21之间势必会出现连接缝隙,尤其是在大角度形变的位置,缝隙更宽。为此,进一步在连接缝隙的外侧面上还盖设有一块隔热板26,其既能够保证形变的实现,不会造成阻挡,同时还能够形成隔热,减少热量从连接缝隙处流失,进而保证了加热聚温腔内加热组件4的温度形成聚拢升温的效果,进而能够快速的对容器壁进行加热升温。
56.如图5所示,进一步,在较佳实施例中,加热组件4包括长条螺纹状的电热丝,每块保温板21的内侧面上均设有固定件215、以用于固定电热丝。长条螺纹状的电热丝能够保证随着可变形加热器2一起发生形变和拉伸,进而使得整个长条状的加热区都加热均匀。
57.如图4所示,进一步,在较佳实施例中,处于最后一块的保温板21上还设有控制器27,控制器27分别和固定组件3、加热组件4和双松弛致动器25连接、以用于供电并进行控
制。控制器27通过外接电源线和外部电源连通,不但进行供电,而且通过控制器27上的控制按钮对固定组件3、加热组件4和双松弛致动器25进行控制。
58.如图7、图8所示,进一步,在较佳实施例中,还设有蠕动式吸附机器人5和遥控器(图中未示出),蠕动式吸附机器人5和首块保温板21可拆卸连接、用于连接后带动可变形加热器2移动至被测容器的作业面后再使可变形加热器2进行变形、固定和加热作业,遥控器用于控制蠕动式吸附机器人5移动、并用于控制固定组件3、加热组件4和双松弛致动器25作业。如图7示所示,在本实施例中,蠕动式吸附机器人5为蠕动式吸附爬壁机器人,包括安装板56,安装板56上设有负压吸附组件51、万向蠕动轮组件52、电源组件53、驱动组件54、中央控制组件55,电源组件53给负压吸附组件51、驱动组件54、中央控制组件55供电,中央控制组件55通过无线形式接收遥控器的遥控信号并控制驱动组件54驱动万向蠕动轮组件52蠕动,万向蠕动轮组件52的每个万向轮上均设有磁性,能够吸附在金属的被测容器上,但是吸附能力不是很强,能够在驱动组件54驱动时实现吸附式蠕动,也即蠕动式吸附机器人5在蠕动时通过多个万向轮的交叉吸附,在保证移动的同时并不会掉落。待蠕动式吸附机器人5移动到位后,负压吸附组件51再进行强力的负压吸附,使得蠕动式吸附机器人5能够牢牢的固定在被测容器上,进行使得后续当可变形加热器2进行变形、固定和加热作业时不会掉落。
59.通过设置可拆卸的蠕动式吸附机器人5,使得本发明的装置适用范围进一步广。当被测容器为很高的容器时(例如户外大型直立式高罐体)、或者不方便人员操作的容器时,蠕动式吸附机器人5可以带动可变形加热器2移动至被测容器的任意作业面后再使可变形加热器2进行变形、固定和加热作业,智能化程度极高,作业高效、安全。
60.本发明还提供一种基于上述任意的密闭容器液位测量装置的密闭容器液位测量方法,方法如下:先将可变形加热器2竖向的放置于被测容器的外壁面上;然后调整可变形加热器2使可变形加热器2适应被测容器的外壁面走势并通过固定组件3固定于被测容器的外壁面上;然后打开加热组件4对被测容器的外壁加热;加热结束后移开可变形加热器2,此时由于被测容器内部液体和气体吸热效能不同,造成被测容器加热区的表面温度呈现显著差异;然后通过红外热像仪1对加热区进行观测,此时观测到的温度梯度最大的位置即为被测容器内部液位。
61.本发明的密闭容器液位测量方法,操作方便快捷,无需再打开密闭容器,也无需使测量装置和容器内存储物相接触,大大提高了测量的安全性,降低了测量风险,既保护了测量装置又保护了密闭容器和容器内的存储物。同时该方法通过红外热像仪1对加热区进行观测,观测精度高,完全解决了现有技术中的由于容器壁过厚或者是气液相温度差小而造成的测量精度低的问题。
62.虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下,都可利用上述揭示的技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。