1.本发明涉及甘蔗种植设备,具体涉及一种宿根蔗补种机器人及方法。
背景技术:
2.食糖的主要原料是甘蔗,种植面积占糖料面积的85%以上,蔗糖产量占食糖总产量的90%以上。宿根蔗种植面积约占甘蔗种植总面积的60%~70%。宿根蔗宿根年限越长,整个植蔗周期的种植成本就越低,经济效益越显著,已成为了蔗糖行业的共识。
3.甘蔗生长期难免会遭遇病虫、冰霜冻、干旱为害,加之收获期人畜践踏、机具碾压等因素的影响,地下宿根芽受到不同程度伤害,导致宿根蔗畦缺株断垄。如果缺株断垄严重的宿根蔗地不及时有效地采取补种措施,弥补有效茎的不足,会造成蔗茎产量减产和缩短宿根蔗的宿根年限。
4.申请公布号为cn110558014a的发明申请公开了一种甘蔗横向种植机的甘蔗种实时补种装置,包括:蔗种检测装置;集蔗箱;安装于集蔗箱的前侧的链式补种提升机构,其等间隔地设置有若干个取种槽;安装于链式补种提升机构的前端的下方的储蔗槽,其进蔗口与链式补种提升机构的取种槽对应,出蔗口位于蔗种检测装置的前方且与蔗种播种输送通道的蔗种存放槽对应;安装于储蔗槽内的第一余量检测装置;以能够转动的方式安装于储蔗槽的出蔗口的下方的涡轮式储蔗耙辊,其沿周向均匀地设置有若干个耙蔗槽,涡轮式储蔗耙辊转动时,能够通过耙蔗槽把储蔗槽内的蔗种逐个向下耙出;以及安装于涡轮式储蔗耙辊的前方的导流装置。该发明能够进行实时补种,有效防止出现漏播种的现象。
5.然而,上述中的甘蔗种实时补种装置只能改善种植机播种时漏播的问题,针对宿根蔗生长期内遭遇自然灾害,以及收获时遭受人畜、机具的破坏而导致的宿根蔗畦缺株断垄的问题则难以解决。
技术实现要素:
6.本发明的目的在于克服上述存在的问题,提供一种宿根蔗补种机器人,该宿根蔗补种机器人能够改善宿根蔗生长期内发生的缺株断垄问题,从而延长宿根蔗宿根年限,提高宿根蔗种植经济效益。
7.本发明的另一个目的在于提供一种宿根蔗补种方法。
8.本发明的目的通过以下技术方案实现:
9.一种宿根蔗补种机器人,包括行走机构、打洞覆土机构以及落种机构,所述打洞覆土机构和落种机构设置在行走机构上;
10.所述打洞覆土机构包括钻筒、钻头、用于驱动钻头进行旋转的旋转驱动机构以及用于驱动钻筒和钻头下移的竖向驱动机构;所述钻头设置在钻筒中,该钻头上设有螺旋叶片;所述旋转驱动机构设置在竖向驱动机构的竖向传动板上,该旋转驱动机构的驱动端与钻头连接;所述钻筒与所述竖向传动板之间设有可竖向相对移动的竖向滑动结构;
11.所述落种机构包括储种斗、若干个种勺和用于驱动种勺从储种斗种将甘蔗取出的
落种驱动机构。
12.上述宿根蔗补种机器人的工作原理为:
13.工作时,行走机构驮着打洞覆土机构以及落种机构在田地上行走,先驱动打洞覆土机构的钻筒移动至待补种的位置正上方,然后启动竖向驱动机构和旋转驱动机构,竖向驱动机构驱动钻筒和旋转的钻头下降靠近待补种的位置;由于钻筒与竖向传动板之间设有可竖向相同移动的竖向滑动结构,当钻筒移动与地面相抵接时,钻筒不再向下移动,旋转的钻头继续随着竖向驱动机构的竖向传动板深入泥土中,并通过螺旋叶片将下方的泥土往上提升至钻筒中,直至钻头深入到合适的深度。打完洞后,旋转驱动机构停止驱动,竖向驱动机构驱动竖向传动板往上移动,带动钻头缩回钻筒中,然后与钻筒一起上升离开地面。
14.再驱动落种机构移动至打好的洞口正上方,接着启动落种驱动机构,驱动种勺靠近储种斗,从而将甘蔗从储种斗种取出,并投放到下方的打好的洞穴种,完成投种动作。
15.最后驱动打洞覆土机构的钻筒回到洞穴的正上方,旋转驱动机构反向驱动钻头进行旋转,钻筒内的泥土在螺旋叶片的输送下离开钻筒掉落进洞中,完成覆土动作。
16.本发明的一个优选方案,其中,所述行走机构包括履带和承载平台,所述承载平台设置在履带上;所述打洞覆土机构和落种机构设置在承载平台上。
17.本发明的一个优选方案,其中,所述旋转驱动机构包括旋转驱动电机,该旋转驱动电机的壳体固定设置在竖向传动板上,该旋转驱动电机的输出轴与钻头同轴固定连接。
18.本发明的一个优选方案,其中,所述竖向驱动机构包括所述竖向传动板、竖向驱动电机和竖向直线模组;所述竖向传动板与竖向直线模组的移动端固定连接。通过上述结构,在竖向驱动电机的驱动下,竖向传动板可以进行升降移动,从而驱动钻头和钻筒靠近或远离地面。
19.进一步,所述竖向传动板与竖向直线模组的移动端之间设有竖向导向结构。
20.本发明的一个优选方案,其中,所述竖向滑动结构包括竖向滑动杆和与竖向滑动杆配合的竖向滑动孔,所述竖向滑动杆固定设置在钻筒或竖向传动板上,所述竖向滑动孔开设在竖向传动板或钻筒上。通过上述结构,可以实现钻筒与钻头之间的相对移动,从而完成打洞和覆土的工作。
21.本发明的一个优选方案,其中,还包括定位移动机构,该定位移动机构包括第一横向驱动机构和第二横向驱动机构,所述第一横向驱动机构的驱动方向与第二横向驱动机构的驱动方向垂直;
22.所述第二横向驱动机构设置在第一横向驱动机构上;
23.所述竖向驱动机构设置在第二横向驱动机构上。
24.进一步,所述第一横向驱动机构包括第一横向驱动电机和第一直线模组,所述第二横向驱动机构与第一直线模组的移动端固定连接;
25.所述第二横向驱动机构包括第二横向驱动电机和第二直线模组,所述第二竖向驱动机构与第二直线模组的移动端固定连接。
26.通过上述结构,在第一横向驱动电机和第二横向驱动电机的驱动下,钻头和钻筒可以在水平面上移动,从而移动至想要的位置。
27.进一步,所述第一竖向驱动机构与第一直线模组的移动端之间设有第一横向导向结构;
28.所述第二竖向驱动机构与第二直线模组的移动端之间设有第二横向导向结构。
29.本发明的一个优选方案,其中,所述落种驱动机构包括落种安装架、落种驱动电机和落种传动组件,所述落种驱动电机固定设置在落种安装架上,所述落种传动组件包括落种传动链和落种传动链轮;所述种勺固定设置在落种传动链上;在工作状态下,所述落种传动链带动种勺自下而上从储种斗中将甘蔗取出。
30.进一步,所述落种机构还包括护罩,该护罩中设有供甘蔗下落的下落通道;在工作状态下,所述种勺将甘蔗投放至护罩中,甘蔗沿着下落通道往下掉落。这样,可以对甘蔗进行限位,使得甘蔗落到对应的位置上。
31.进一步,所述落种机构还包括用于承接从储种斗中转移出来的甘蔗的投种箱以及用于打开或关闭投种箱的投放口的投种开关,所述投种开关设置在投种箱上。
32.进一步,所述投放开关包括底板和电磁伸缩模块,所述底板位于在投种箱的投放口的下方,该底板的一端与投种箱的底部铰接;
33.所述电磁伸缩模块包括伸缩缸体和伸缩杆,所述伸缩缸体固定设置在投种箱的外壁,所述伸缩杆的竖向设置在伸缩缸体中,该伸缩杆的下端通过铰接的传动杆与底板的另一端连接。通过上述结构,当需要投放甘蔗时,通过伸缩杆往下驱动传动杆,使得底板往下摆动,从而打开投放口,此时位于投种箱内的甘蔗即可从投种箱的投放口投出。
34.进一步,所述投种箱设置在定位移动机构上,这样不仅可以转接甘蔗,还可以随着定位移动机构进行水平移动,从而将甘蔗投放到打好的洞口中。
35.进一步,所述落种机构还包括位置检测模块,该位置检测模块包括光束发射元件和挡光片,所述光束发射元件设置在竖向驱动机构的固定端上,该光束发射元件上设有感应槽;所述挡光片设置在所述竖向传动板上。通过上述结构,当竖向驱动机构驱动钻头复位至最高位时,挡光片也随着竖向传动板往上移动至光束发射元件的感应槽中,即向投放开关发送打开投放口的指令,从而投放甘蔗。当挡光片远离光束发射元件的感应槽时,投放开关即关闭投放口。
36.进一步,所述投种箱设有上大下小的内腔,该投种箱上远离底板的铰接中心的一侧设有挡板。这样,可以对投出来的甘蔗种起导向作用,有利于甘蔗种竖直落入打好的洞中。
37.本发明的一个优选方案,其中,还包括视觉检测系统,该视觉检测系统包括用于实时拍摄宿根蔗垄的图像获取模块、用于对获取到的图像分析并计算出补种位置的的上位机以及根据上位机的指令控制各驱动机构作业的下位机;
38.所述上位机分别与图像获取模块与下位机电连接。
39.一种宿根蔗补种方法,包括以下步骤:
40.行走机构驮着打洞覆土机构以及落种机构在田地上行走;
41.通过视觉检测系统寻找补种的位置;
42.驱动打洞覆土机构的钻筒移动至待补种的位置正上方,启动竖向驱动机构和旋转驱动机构,竖向驱动机构驱动钻筒和旋转的钻头下降靠近待补种的位置;
43.当钻筒移动与地面相抵接时,钻筒停止向下移动,旋转的钻头继续随着竖向驱动机构的竖向传动板深入泥土中,并通过螺旋叶片将下方的泥土往上提升至钻筒中,直至钻头深入到合适的深度;打完洞后,旋转驱动机构停止驱动,竖向驱动机构驱动竖向传动板往
62.y’=(y
o1
y
o2
)
÷263.z’=(z
o1
z
o2
)
÷
2;
64.若d小于两个种植间隔,则不计算补苗点。
65.进一步,当图像里只检测到单株甘蔗幼苗时,上位机通计算获取该检测框的中心三维空间坐标(xo,yo,zo),并在该中心三维坐标的正前方一个种植间隔处生成一个补苗点,计算公式如下:
66.x=xo67.y=yo 10
68.z=zo。
69.进一步,将检测框的三维空间坐标储存到列表中,利用最小二乘法进行拟合,拟合得到两行作物行的直线方程,再求取这2条直线的中线,即为导航路径。
70.进一步,在距离作物行的前端和末端前处分别放置标识牌,图像获取模块识别到标识牌并计算摄像头与标识牌的距离;当图像获取模块与标识牌之间的距离等于作物行的前端或末端与标识牌之间的距离时,上位机发送信号控制下位机底盘转弯,进入另一行作物。
71.本发明与现有技术相比具有以下有益效果:
72.1、本发明的宿根蔗补种机器人能够改善宿根蔗生长期内发生的缺株断垄问题,从而延长宿根蔗宿根年限,提高宿根蔗种植经济效益。
73.2、通过钻头与钻筒相配合,使得在打洞的过程中能够将钻出来的土储存在钻筒中,需要覆土时只需反转钻头即可让钻筒中的土落入洞中,同时实现打洞与覆土的功能。
74.3、通过拍摄甘蔗地的图像传回上位机进行计算处理,规划出作业路径,使得宿根蔗补种机器人能够自动行走作业,从而实现减少人工控制,降低人力成本的效果。
75.4、通过图像处理的方法,宿根蔗补种机器人能够自动检测和计算出需要补种的位置,并控制执行机构进行补种,从而实现自动作业,减少人力成本的效果。
附图说明
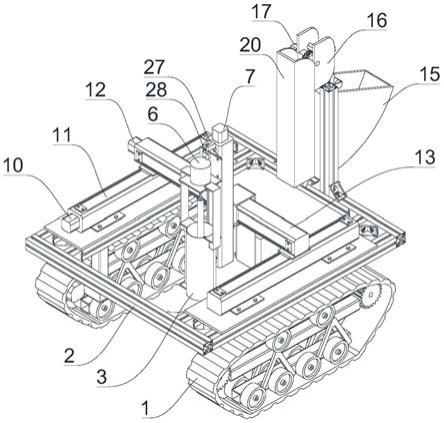
76.图1-2为本发明的宿根蔗补种机器人的两个不同视角的立体结构示意图。
77.图3为本发明的打洞覆土机构的立体结构示意图。
78.图4为本发明的落种机构的储种斗、种勺和落种驱动机构的立体结构示意图。
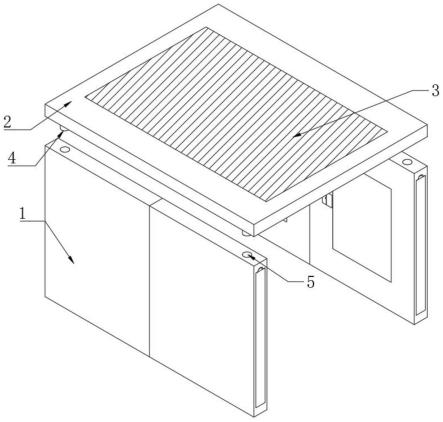
79.图5为本发明的落种机构的投种箱和投种开关的立体结构示意图。
80.图6为本发明的视觉检测系统的工作流程图。
具体实施方式
81.为了使本领域的技术人员很好地理解本发明的技术方案,下面结合实施例和附图对本发明作进一步描述,但本发明的实施方式不仅限于此。
82.参见图1-2,本实施例的宿根蔗补种机器人,包括行走机构、打洞覆土机构、定位移动机构、落种机构以及视觉检测系统。
83.所述行走机构包括履带1和承载平台2,所述承载平台2设置在履带1上;所述打洞覆土机构和落种机构设置在承载平台2上。
84.参见图1-3,所述打洞覆土机构包括钻筒3、钻头4、用于驱动钻头4进行旋转的旋转驱动机构以及用于驱动钻筒3和钻头4下移的竖向驱动机构;所述钻头4设置在钻筒3中,该钻头4上设有螺旋叶片;所述旋转驱动机构设置在竖向驱动机构的竖向传动板5上,该旋转驱动机构的驱动端与钻头4连接;所述钻筒3与所述竖向传动板5之间设有可竖向相对移动的竖向滑动结构。
85.参见图1-2,所述旋转驱动机构包括旋转驱动电机6,该旋转驱动电机6的壳体固定设置在竖向传动板5上,该旋转驱动电机6的输出轴与钻头4同轴固定连接。
86.参见图1-2,所述竖向驱动机构包括所述竖向传动板5、竖向驱动电机7和竖向直线模组8;所述竖向传动板5与竖向直线模组8的移动端固定连接。通过上述结构,在竖向驱动电机7的驱动下,竖向传动板5可以进行升降移动,从而驱动钻头4和钻筒3靠近或远离地面。
87.进一步,所述竖向传动板5与竖向直线模组8的移动端之间设有竖向导向结构。
88.参见图1-2,所述竖向滑动结构包括竖向滑动杆9和与竖向滑动杆9配合的竖向滑动孔,所述竖向滑动杆9固定设置在钻筒3或竖向传动板5上,所述竖向滑动孔开设在竖向传动板5或钻筒3上。通过上述结构,可以实现钻筒3与钻头4之间的相对移动,从而完成打洞和覆土的工作。
89.参见图1-2,所述定位移动机构包括第一横向驱动机构和第二横向驱动机构,所述第一横向驱动机构的驱动方向与第二横向驱动机构的驱动方向垂直;所述第二横向驱动机构设置在第一横向驱动机构上;所述竖向驱动机构设置在第二横向驱动机构上。
90.进一步,所述第一横向驱动机构包括第一横向驱动电机10和第一直线模组11,所述第二横向驱动机构与第一直线模组11的移动端固定连接;所述第二横向驱动机构包括第二横向驱动电机12和第二直线模组13,所述第二竖向驱动机构与第二直线模组13的移动端固定连接。
91.通过上述结构,在第一横向驱动电机10和第二横向驱动电机12的驱动下,钻头4和钻筒3可以在水平面上移动,从而移动至想要的位置。
92.进一步,所述第一竖向驱动机构与第一直线模组11的移动端之间设有第一横向导向结构;所述第二竖向驱动机构与第二直线模组13的移动端之间设有第二横向导向结构。
93.参见图1-2和图4,所述落种机构包括储种斗14、若干个种勺15和用于驱动种勺15从储种斗14种将甘蔗取出的落种驱动机构;所述落种驱动机构包括落种安装架16、落种驱动电机17和落种传动组件,所述落种驱动电机17固定设置在落种安装架16上,所述落种传动组件包括落种传动链18和落种传动链轮19;所述种勺15固定设置在落种传动链18上;在工作状态下,所述落种传动链18带动种勺15自下而上从储种斗14中将甘蔗取出。
94.进一步,所述落种机构还包括护罩20,该护罩20中设有供甘蔗下落的下落通道21;在工作状态下,所述种勺15将甘蔗投放至护罩20中,甘蔗沿着下落通道21往下掉落。这样,可以对甘蔗进行限位,使得甘蔗落到对应的位置上。
95.参见图1-2和图4-5,所述落种机构还包括用于承接从储种斗14中转移出来的甘蔗的投种箱22以及用于打开或关闭投种箱22的投放口的投种开关,所述投种开关设置在投种箱22上。
96.进一步,所述投放开关包括底板23和电磁伸缩模块,所述底板23位于在投种箱22的投放口的下方,该底板23的一端与投种箱22的底部铰接;所述电磁伸缩模块包括伸缩缸
体24和伸缩杆25,所述伸缩缸体24固定设置在投种箱22的外壁,所述伸缩杆25的竖向设置在伸缩缸体24中,该伸缩杆25的下端通过铰接的传动杆26与底板23的另一端连接。通过上述结构,当需要投放甘蔗时,通过伸缩杆25往下驱动传动杆26,使得底板23往下摆动,从而打开投放口,此时位于投种箱22内的甘蔗即可从投种箱22的投放口投出。
97.参见图1-2,所述投种箱22设置在定位移动机构上,这样不仅可以转接甘蔗,还可以随着定位移动机构进行水平移动,从而将甘蔗投放到打好的洞口中。
98.参见图1-2,所述落种机构还包括位置检测模块,该位置检测模块包括光束发射元件27和挡光片28,所述光束发射元件27设置在竖向驱动机构的固定端上,该光束发射元件27上设有感应槽;所述挡光片28设置在所述竖向传动板5上。通过上述结构,当竖向驱动机构驱动钻头4复位至最高位时,挡光片28也随着竖向传动板5往上移动至光束发射元件27的感应槽中,即向投放开关发送打开投放口的指令,从而投放甘蔗。当挡光片28远离光束发射元件27的感应槽时,投放开关即关闭投放口。
99.参见图5,所述投种箱22设有上大下小的内腔,该投种箱22上远离底板23的铰接中心的一侧设有挡板29。这样,可以对投出来的甘蔗种起导向作用,有利于甘蔗种竖直落入打好的洞中。
100.本实施例的视觉检测系统包括用于实时拍摄宿根蔗垄的图像获取模块(摄像机)、用于对获取到的图像分析并计算出补种位置的的上位机以及根据上位机的指令控制各驱动机构作业的下位机;所述上位机分别与图像获取模块与下位机电连接。
101.参见图1-5,本实施例的宿根蔗补种方法,包括以下步骤:
102.行走机构驮着打洞覆土机构以及落种机构在田地上行走。
103.通过视觉检测系统寻找补种的位置。
104.驱动打洞覆土机构的钻筒3移动至待补种的位置正上方,启动竖向驱动机构和旋转驱动机构,竖向驱动机构驱动钻筒3和旋转的钻头4下降靠近待补种的位置。
105.当钻筒3移动与地面相抵接时,钻筒3停止向下移动,旋转的钻头4继续随着竖向驱动机构的竖向传动板5深入泥土中,并通过螺旋叶片将下方的泥土往上提升至钻筒3中,直至钻头4深入到合适的深度;打完洞后,旋转驱动机构停止驱动,竖向驱动机构驱动竖向传动板5往上移动,带动钻头4缩回钻筒3中,然后与钻筒3一起上升离开地面。
106.驱动落种机构移动至打好的洞口正上方,启动落种驱动机构,驱动种勺15靠近储种斗14,将甘蔗从储种斗14种取出,并投放到下方的打好的洞穴种,完成投种动作。
107.驱动打洞覆土机构的钻筒3回到洞穴的正上方,旋转驱动机构反向驱动钻头4进行旋转,钻筒3内的泥土在螺旋叶片的输送下离开钻筒3掉落进洞中,完成覆土动作。
108.参见图6,所述视觉检测系统的操作方式为:
109.通过图像获取模块对前方的宿根蔗垄进行拍摄,并将图像传给上位机,上位机收到图像后实时计算,确定作业的行驶路径。
110.在行驶过程中,上位机将实时传上来的图像进行识别,将识别到的宿根蔗苗打上一个矩形的检测框;若图像中只有一株宿根蔗苗,则以检测框的中心点为起点,每隔一个种植间隔打一个补种标记,并且计算出每个补种标记的坐标;结合上述补种坐标,上位机向下位机发送补种指令;下位机接收到指令后,通过控制各机构的电机启停来进行补种作业。
111.若图像中出现多株宿根蔗苗,则对每株宿根蔗苗分别打上检测框,然后计算两个
相邻检测框中心点的距离以判断是否需要补种。
112.若相邻的两个检测框中心点距离小于两个种植间隔,则判定不需要补种。
113.若距离大于两个种植间隔且小于三个种植间隔,则将两个检测框中心点距离的中点标记出来,并生成坐标传给下位机,下位机接到坐标后,控制相关机构进行补种作业。
114.若距离大于三个种植间隔,以靠近补种机器人的检测框中心点为起始点,每隔一个种植间隔生成一个坐标传给下位机,下位机根据收到的坐标,控制补种机器人到对应的位置进行补种。
115.进一步,采用基于深度学习的目标检测算法对甘蔗幼苗进行检测,当检测到有甘蔗幼苗时,会在甘蔗幼苗周围绘制检测框,并返回检测框左上角像素坐标(u1,v1)和右下角像素坐标(u2,v2),并通过以下计算过程获取检测框的三维空间坐标:
116.根据返回的检测框左上角像素坐标和右下角像素坐标计算检测框的中心像素坐标(u,v),计算公式如下:
117.u=(u1 u2)
÷2118.v=(v1 v2)
÷
2。
119.根据深度相机的内参和畸变参数,将检测框的中心像素坐标(u,v)转为为检测框的中心三维空间坐标(xo,yo,zo)。
120.进一步,当图像里检测多株甘蔗幼苗时,上位机通计算获取每个检测框的中心三维空间坐标(xo,yo,zo),并存储在一列表中,分别为[(x
o1
,y
o1
,z
o1
),(x
o2
,y
o2
,z
o2
),......,(x
on
,y
on
,z
on
)];根据检测框的中心三维空间坐标计算相邻的两株甘蔗幼苗之间的实际距离d,计算公式如下:
[0121][0122]
若d大于等于两个种植间隔,则根据检测框的中心三维空间坐标计算该两株幼苗之间距离的中心三维空间坐标(x’,y’,z’)作为补苗点,并将补苗点通过串口通信传递给下位机,计算公式如下:
[0123]
x’=(x
o1
x
o2
)
÷2[0124]
y’=(y
o1
y
o2
)
÷2[0125]
z’=(z
o1
z
o2
)
÷
2。
[0126]
若d小于两个种植间隔,则不计算补苗点。
[0127]
进一步,当图像里只检测到单株甘蔗幼苗时,上位机通计算获取该检测框的中心三维空间坐标(xo,yo,zo),并在该中心三维坐标的正前方一个种植间隔处生成一个补苗点,计算公式如下:
[0128]
x=xo[0129]
y=yo 10
[0130]
z=zo。
[0131]
将检测框的三维空间坐标储存到列表中,利用最小二乘法进行拟合,拟合得到两行作物行的直线方程,再求取这2条直线的中线,即为导航路径。
[0132]
在距离作物行的前端和末端前处分别放置标识牌,图像获取模块识别到标识牌并计算摄像头与标识牌的距离;当图像获取模块与标识牌之间的距离等于作物行的前端或末
端与标识牌之间的距离时,上位机发送信号控制下位机底盘转弯,进入另一行作物。
[0133]
上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其他的任何未背离本发明的精神实质与原理下所做的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。