1.本发明属于轨道交通技术领域,尤其涉及一种应用于空轨胶轮车辆的主动安全接地装置及方法。
背景技术:
2.空轨车辆(即空中轨道列车),通过特有轮轨走行系统运行于轨道下方,车体悬于空中运行。为了确保车辆运行时的舒适性,走行系统走行轮和稳固轮通常采用胶轮,由于胶轮天然绝缘,为了确保整车接地安全,需配置接地模块。
3.目前,空轨胶轮车辆的接地模块采用被动接地碳刷在接地区域进行安全接地(如图1)或接地连杆结构或在制动夹钳固定接地模块等,从而实现车辆的安全接地。采用被动接地方式存在接地模块不可靠、不稳定等问题,将影响司乘人员安全。
技术实现要素:
4.本发明的目的在于提供一种空轨胶轮车辆及其主动安全接地装置与方法,以解决现有被动式接地模块的可靠性和稳定性低的问题。
5.本发明是通过如下的技术方案来解决上述技术问题的:一种主动安全接地装置,应用于空轨胶轮车辆,在每节车厢底部的两侧均至少设有一套所述主动安全接地装置,每套所述主动安全接地装置均包括控制模块以及设于车厢底部的接地模块;
6.所述接地模块包括驱动组件、直线运动组件以及钢轮;所述驱动组件与所述直线运动组件连接;所述钢轮设于所述直线运动组件上;所述控制模块的输出端与所述驱动组件电性连接;
7.所述控制模块根据车辆状态和/或运行速度控制所述驱动组件工作,进而控制直线运动组件的运动,进而控制所述钢轮与地面的接触。
8.进一步地,所述驱动组件为电磁块,所述直线运动组件包括弹性部件和磁化导向支撑座;所述电磁块通过弹性部件与所述磁化导向支撑座连接,所述钢轮设于所述磁化导向支撑座上;所述控制模块的输出端与所述电磁块的电磁线圈电性连接;
9.所述控制模块根据车辆的状态和/或运行速度控制所述电磁块是否导通,进而控制所述电磁块对所述磁化导向支撑座的吸附作用,进而控制所述钢轮与地面的接触。
10.进一步地,所述弹性部件为钢板弹簧或螺旋弹簧。
11.进一步地,所述驱动组件为驱动电机,所述直线运动组件为丝杠组件;所述驱动电机的输出端与所述丝杠组件连接,所述钢轮设于所述丝杠组件上。
12.进一步地,所述驱动组件为步进电机,所述直线运动组件为可左右伸缩的电动伸缩杆;所述步进电机的输出端与所述电动伸缩杆连接,所述钢轮设于所述电动伸缩杆上。
13.进一步地,所述控制模块包括第一继电器和第二继电器;所述第一继电器的常开触点与所述第二继电器的线圈串联;所述第二继电器的常开触点与所述驱动组件电性连接;所述第一继电器的线圈的得失电由车辆的tcms系统根据车辆状态和/或运行速度来控
制,所述第二继电器的线圈的得失电由所述第一继电器的常开触点的开闭来控制。
14.进一步地,所述控制模块还包括旁路开关,所述旁路开关设于司机室的司机台;所述旁路开关的一端与电源正极相连,另一端与第二继电器的线圈相连。
15.进一步地,所述旁路开关为常开可复位开关。
16.基于同一发明构思,本发明还提供一种利用如上所述主动安全接地装置进行主动接地控制的方法,包括以下步骤:
17.当车辆未牵引和/或运行速度为零时,控制模块控制驱动组件不工作,控制直线运动组件不运动,钢轮与地面接触;
18.当车辆牵引和/或运行速度不为零时,控制模块控制驱动组件通电工作,控制直线运动组件回缩运动,钢轮与地面脱离或不接触。
19.基于同一发明构思,本发明还提供一种空轨胶轮车辆,包括如上所述的主动安全接地装置。
20.有益效果
21.与现有技术相比,本发明的优点在于:
22.本发明所提供的一种空轨胶轮车辆及其主动安全接地装置与方法,可根据车辆状态和/或运行速度实现钢轮接地的主动控制,确保了车辆安全接地,消除了车辆电势差,确保了行车或检修维护的安全性,大大提高了安全接地控制的可靠性和稳定性。
23.相对于被动式接地模块,本发明可实现车辆在库内检修、进出站点或线路救援时通过主动控制实现车辆自动、安全接地,从而确保了司乘人员的安全;在tcms系统故障时,可以通过旁路开关实现钢轮脱离地面控制,提高了冗余性,避免了车辆超过线路界限的风险,避免了钢轮影响车辆的正常运行;本发明在确保主动安全接地的同时,钢轮在线路或站点进出停靠时起到导向轮作用。
附图说明
24.为了更清楚地说明本发明的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一个实施例,对于本领域普通技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
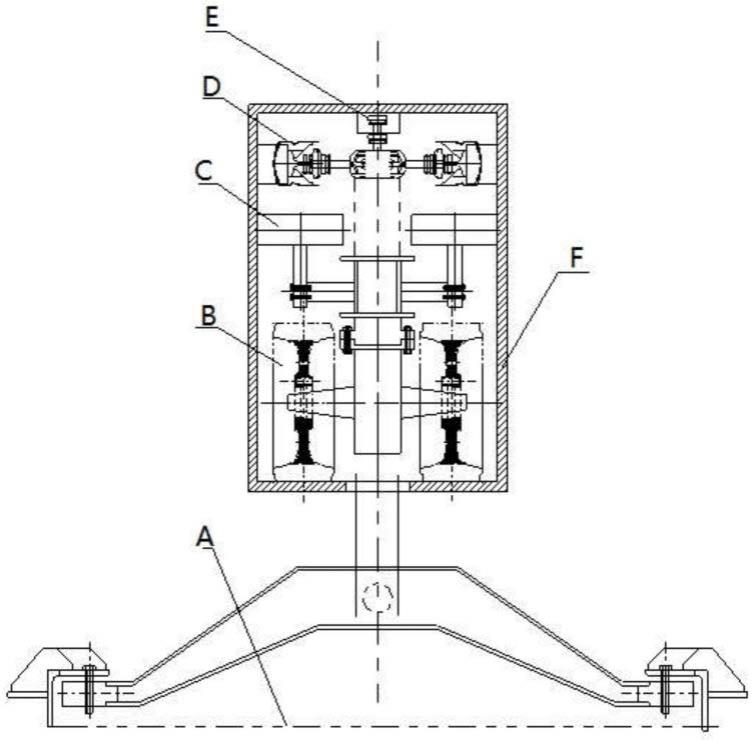
25.图1是本发明背景技术中空轨胶轮车轮轨关系示意图;其中,a-车体,b-走行轮,c-稳固轮,d-受流装置安装区,e-回流及接地安装区,f-轨道箱梁。
26.图2是本发明实施例中空轨胶轮车辆的侧视图;
27.图3是本发明实施例中图2的a-a剖面图;
28.图4是本发明实施例1中接地模块的结构示意图;
29.图5是本发明实施例中控制模块原理图;
30.图6是本发明实施例中主动接地控制方法流程图。
31.其中,1-接地模块,11-电磁块,12-弹性部件,13-磁化导向支撑座,14-钢轮。
具体实施方式
32.下面结合本发明实施例中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的
实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.下面以具体地实施例对本技术的技术方案进行详细说明。下面这几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例不再赘述。
34.实施例1
35.本发明实施例所提供的一种主动安全接地装置,应用于空轨胶轮车辆,在每节车厢底部的两侧均设有两套所述主动安全接地装置,如图2和3所示。
36.每套主动安全接地装置均包括控制模块以及设于车厢底部的接地模块1。如图4所示,接地模块1包括电磁块11、弹性部件12、磁化导向支撑座13以及钢轮14;电磁块11通过弹性部件12与磁化导向支撑座13连接,钢轮14设于磁化导向支撑座13上;如图5所示,控制模块包括第一继电器和第二继电器;第一继电器的常开触点k12与第二继电器的线圈k21串联;第二继电器的常开触点k22与电磁块11的电磁线圈电性连接;第一继电器的线圈k11的得失电由车辆的tcms系统根据车辆状态和/或运行速度来控制,第二继电器的线圈k21的得失电由第一继电器的常开触点k12的开闭来控制。
37.当车辆运行速度为零时,tcms系统控制第一继电器的线圈k11失电,第一继电器的常开触点k12保持断开,第二继电器的线圈k21失电,第二继电器的常开触点k22保持断开,电磁块11不通电,电磁块11对磁化导向支撑座13不具有吸附作用,弹性部件12处于自然状态,钢轮14与站台地面接触(如图4(a)所示状态),实现车辆接地,确保了车辆接地安全,消除了车辆电势差;当车辆运行速度不为零时,tcms系统控制第一继电器的线圈k11得电,第一继电器的常开触点k12闭合,第二继电器的线圈k21得电,第二继电器的常开触点k22闭合,电磁块11通电,电磁块11对磁化导向支撑座13具有吸附作用,压缩弹性部件12,钢轮14与地面不接触或脱离(如图4(b)所示状态),接地模块1对车辆正线运行状态无影响,确保了车辆的安全运行,避免了车辆超过线路限界风险。
38.由电磁块11、弹性部件12、磁化导向支撑座13以及钢轮14构成的接地模块1具有结构简单、质量轻、易于控制、响应速度快以及便于检修维护的优势。
39.在本发明的一种具体实施方式中,弹性部件12为钢板弹簧或螺旋弹簧。
40.在本发明的一种具体实施方式中,控制模块还包括旁路开关n1,旁路开关n1设于司机室的司机台;旁路开关n1的一端与电源正极相连,另一端与第二继电器的线圈k21相连,如图5所示。
41.当钢轮14动作不到位(即与地面无法正常脱离)或tcms系统故障而无法控制钢轮14与地面正常脱离时,司机通过旁路开关n1控制第二继电器的线圈k21得电,从而控制驱动组件通电工作,进而使钢轮14与地面正常脱离,保证了接地模块1工作的可靠性。
42.本实施例中,旁路开关n1为常开可复位开关。
43.基于同一发明构思,如图6所示,本发明实施例还提供一种利用如上所述主动安全接地装置进行主动接地控制的方法,包括以下步骤:
44.当车辆运行速度为零时,控制模块控制电磁块11不通电,电磁块11对磁化导向支撑座13无吸附作用,弹性部件12不被压缩而处于自然状态,钢轮14与站台地面接触,确保了在站台时车辆的主动安全接地;当车辆运行速度不为零时,控制模块控制电磁块11通电,电磁块11产生电磁力且对磁化导向支撑座13具有吸附作用,弹性部件12被压缩而处于压缩状
态,钢轮14与地面脱离或不接触,确保了车辆处于正线状态时接地模块1对车辆运行无影响。
45.实施例2
46.本发明实施例所提供的一种主动安全接地装置,应用于空轨胶轮车辆,在每节车厢底部的两侧均设有两套所述主动安全接地装置,如图2和3所示。
47.每套主动安全接地装置均包括控制模块以及设于车厢底部的接地模块1。接地模块1包括驱动电机、丝杠组件以及钢轮14;驱动电机的输出端与丝杠组件连接,钢轮14设于丝杠组件上。如图5所示,控制模块包括第一继电器和第二继电器;第一继电器的常开触点k12与第二继电器的线圈k21串联;第二继电器的常开触点k22与电磁块11的电磁线圈电性连接;第一继电器的线圈k11的得失电由车辆的tcms系统根据车辆状态和/或运行速度来控制,第二继电器的线圈k21的得失电由第一继电器的常开触点k12的开闭来控制。
48.当车辆处于未牵引状态时,tcms系统控制第一继电器的线圈k11失电,第一继电器的常开触点k12保持断开,第二继电器的线圈k21失电,第二继电器的常开触点k22保持断开,驱动电机不通电工作,丝杠组件不直线运动,此时钢轮14与站台地面接触,实现车辆接地,确保了车辆接地安全,消除了车辆电势差;当车辆处于牵引状态时,tcms系统控制第一继电器的线圈k11得电,第一继电器的常开触点k12闭合,第二继电器的线圈k21得电,第二继电器的常开触点k22闭合,驱动电机通电工作,驱动电机控制丝杠组件直线运动,从而控制钢轮14直线移动,使钢轮14与地面不接触或脱离,接地模块1对车辆正线运行状态无影响,确保了车辆的安全运行。
49.基于同一发明构思,如图6所示,本发明实施例还提供一种利用如上所述主动安全接地装置进行主动接地控制的方法,包括以下步骤:
50.当车辆处于未牵引状态时,控制模块控制驱动电机不通电工作,丝杠组件不直线运动,此时钢轮14与站台地面接触,确保了在站台时车辆的主动安全接地;当车辆处于牵引状态时,控制模块控制驱动电机通电工作,驱动电机控制丝杠组件直线运动,从而控制钢轮14直线移动,使钢轮14与地面不接触或脱离,确保了车辆处于正线状态时接地模块1对车辆运行无影响。
51.实施例3
52.本发明实施例所提供的一种主动安全接地装置,应用于空轨胶轮车辆,在每节车厢底部的两侧均设有两套所述主动安全接地装置,如图2和3所示。
53.每套主动安全接地装置均包括控制模块以及设于车厢底部的接地模块1。接地模块1包括步进电机、可左右伸缩的电动伸缩杆以及钢轮14;步进电机的输出端与电动伸缩杆连接,钢轮14设于电动伸缩杆上。如图5所示,控制模块包括第一继电器和第二继电器;第一继电器的常开触点k12与第二继电器的线圈k21串联;第二继电器的常开触点k22与电磁块11的电磁线圈电性连接;第一继电器的线圈k11的得失电由车辆的tcms系统根据车辆状态和/或运行速度来控制,第二继电器的线圈k21的得失电由第一继电器的常开触点k12的开闭来控制。
54.当车辆处于未牵引状态且运行速度为零时,tcms系统控制第一继电器的线圈k11失电,第一继电器的常开触点k12保持断开,第二继电器的线圈k21失电,第二继电器的常开触点k22保持断开,步进电机不通电工作,电动伸缩杆不做左右伸缩运动,此时钢轮14与站
台地面接触,实现车辆接地,确保了车辆接地安全,消除了车辆电势差;当车辆处于牵引状态且运行速度不为零时,tcms系统控制第一继电器的线圈k11得电,第一继电器的常开触点k12闭合,第二继电器的线圈k21得电,第二继电器的常开触点k22闭合,步进电机通电工作,步进电机控制电动伸缩杆做回缩运动,从而控制钢轮14直线移动,使钢轮14与地面不接触或脱离,接地模块1对车辆正线运行状态无影响,避免了车辆超出线路限界的风险,确保了车辆的安全运行。
55.基于同一发明构思,如图6所示,本发明实施例还提供一种利用如上所述主动安全接地装置进行主动接地控制的方法,包括以下步骤:
56.当车辆处于未牵引状态且运行速度为零时,控制模块控制步进电机不通电工作,电动伸缩杆不做左右伸缩运行,此时钢轮14与站台地面接触,确保了在站台时车辆的主动安全接地;当车辆处于牵引状态且运动速度不为零时,控制模块控制步进电机通电工作,步进电机控制电动伸缩杆做回缩运动,从而控制钢轮14直线移动,使钢轮14与地面不接触或脱离,确保了车辆处于正线状态时接地模块1对车辆运行无影响。
57.以上所揭露的仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或变型,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。