1.本发明涉及未知雷达辐射源目标的表征识别技术领域,具体地指一种基于任务属性的未知雷达辐射源目标的表征识别方法。
背景技术:
2.反辐射导弹是现代电子战中对雷达等电磁辐射源进行硬杀伤的最有效武器,与先进电磁频谱战设备相配合的反辐射源导弹攻击是未来电磁对抗中的重要手段。
3.由于战时很有可能出现大量未知的雷达信号,威胁等级极高且数据库资源缺乏,这会对安装在制导武器头部的导弹导引头的电磁辐射源感知与识别造成严重影响,进而对反辐射导弹的导引精准带来了巨大挑战,这将对作战构成巨大的潜在威胁。
技术实现要素:
4.针对现有技术的不足之处,本发明提出一种基于任务属性的未知雷达辐射源目标的表征识别方法,构建适应典型任务应用的已知雷达辐射源目标的智能表征模型,实现对已知电磁辐射源目标的的精准识别;同时,对未知雷达辐射源目标进行迁移学习,实现基于任务属性的未知雷达辐射源目标的准确表征。
5.为达到上述目的,本发明所设计的一种基于任务属性的未知雷达辐射源目标的表征识别方法,其特别之处在于,包括如下步骤:步骤1,对分选后的单脉冲已知雷达辐射源目标建立针对多任务需求的电磁信号智能表征特征库,所述智能表征特征库包括雷达信号脉间信息特征、雷达辐射源特性信息特征、和雷达信号脉内信息特征;所述雷达信号脉间信息特征包括与雷达用途、类型、以及工作状态对应的多种雷达重频调制类型,所述雷达重频调制类型包括重频固定、重频参差、重频滑变、重频分组、重频抖动、正弦调制;所述辐射源特性信息特征包括与雷达工作状态对应的天线扫描方式,所述天线扫描方式包括机械扫描和电子扫描,所述机械扫描包括圆周扫描、扇形扫描、栅形扫描、圆锥扫描;还包括与相控阵雷达工作状态对应的数据率;所述雷达信号脉内信息特征包括与电磁目标信号时频能量分布对应的脉内波形;步骤2,构建雷达重频调制类型的学习识别模型:通过数学变换,线下提取雷达脉冲序列的比值特征、比重特征、频率特征、形状特征、以及自相关特征参数,作为分类器的输入;若输入的比值特征趋近于零,则该雷达脉冲序列确定为重频固定类型,若输入的比重特征趋近于零,则该雷达脉冲序列确定为重频分组类型,若输入的频率特征∈(1,2),则该雷达脉冲序列确定为重频滑变类型,若输入的形状特征∈(0.03,0.3),则该雷达脉冲序列确定为正弦调制类型,若输入的形状特征∈(0.5,0.8),则该雷达脉冲序列确定为重频抖动类型,若输入的自相关特征的峰值个数趋近于零,则该雷达脉冲序列确定为重频参差类型;构建天线扫描方式的学习识别模型:提取每组脉冲序列中的最大主瓣序列,确定
最大主瓣序列一阶差分的绝对值中的最大值md,同时确定相邻脉冲均在同一波位内的脉冲所占比例rd,令zd=α*md β*rd,其中,α,β为特征参数的权重,且α β=1,当zd>hz时,则该雷达脉冲序列为电子扫描方式,当zd≤hz时,则该雷达脉冲序列为机械扫描方式,hz为设定的门限;构建机械扫描方式的学习识别模型:线下提取峭度、主瓣个数、主瓣幅度差值、以及主瓣间隔最大比值参数,作为分类器的输入;若输入的峭度趋近于零,则该雷达脉冲序列确定为圆锥扫描方式,若主瓣个数为一,则该雷达脉冲序列确定为圆周扫描方式,若主瓣幅度差值趋近于零,则该雷达脉冲序列确定为扇形扫描方式,若主瓣间隔最大比值的变化较大,则该雷达脉冲序列确定为栅形扫描方式;构建数据率的学习识别模型:首先根据数据率的计算公式确定数据率的数值高低,线下提取数据率参数作为分类器的输入,并根据数据率的高低确定雷达脉冲序列的搜索状态和跟踪状态;构建脉内波形的学习识别模型:线下提取在时频能量三维空间中的任意一点处的电磁目标信号分布特征,并将提取结果记录在卷积结果中,建立三维空间高阶自相关过完备特征库,通过机器学习,实现三维空间高阶自相关过完备特征库的精简,使过完备特征库适应特定的电磁目标。
6.步骤3,将雷达重频调制类型的学习识别模型、天线扫描方式的学习识别模型、数据率的学习识别模型、以及脉内波形的学习识别模型作为训练样本,通过深度神经网络对训练样本进行特征学习训练,获得适应典型任务应用的已知雷达辐射源目标的智能表征模型,再通过该深度神经网络对未知雷达辐射源目标进行迁移学习,根据所执行的任务属性类别,选取相应的智能表征模型,实现基于任务属性的未知雷达辐射源目标的准确表征。
7.本发明的优点在于:1. 本发明通过对已知雷达辐射源的电磁信号智能表征特征库进行挖掘,线下训练得到适应典型任务应用的已知雷达辐射源目标的智能表征模型(包括雷达重频调制类型的学习识别模型、天线扫描方式的学习识别模型、数据率的学习识别模型、以及脉内波形的学习识别模型),再通过迁移学习,根据所执行的任务属性类别,选取相应的智能表征模型,实现基于任务属性的未知雷达辐射源目标的准确表征。
8.2. 本发明通过数学变换,线下提取雷达脉冲序列的比值特征、比重特征、频率特征、形状特征、以及自相关特征参数,通过这5个参数识别出雷达重频调制类型中的重频固定、重频分组、重频滑变、正弦调制、重频抖动、重频参差,构建雷达重频调制类型的学习识别模型。
9.本发明基于任务属性的未知雷达辐射源目标的表征识别方法建立面向多任务需求的电磁辐射源目标通用特征库,通过挖掘特征库内的特征要素信息,构建适应典型任务应用的已知雷达辐射源目标的工作模式智能表征模型,实现对已知电磁辐射源目标的精准识别;同时,对未知雷达辐射源目标进行迁移学习,实现基于任务属性的未知雷达辐射源目标的准确表征。
附图说明
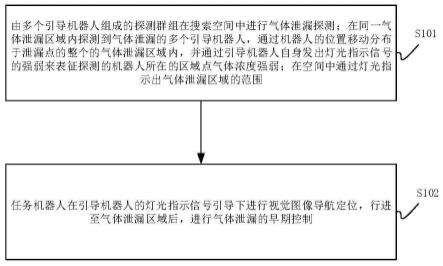
10.图1为本发明的流程图;
图2为本发明中的重频调制类型的学习识别示意图;图3a~3d为本发明中的机械扫描的示意图;图4a~4d为本发明中的机械扫描特征参数的仿真曲线图;图5为发明中的参考空间单元模型;图6为发明中的参考单元单层位置分布;图7为仿真试验环境示意图;图8为本发明应用在图7中的仿真试验的已知雷达辐射源目标识别准确率。
具体实施方式
11.以下结合附图和具体实施例对本发明作进一步的详细描述。
12.本基于任务属性的未知雷达辐射源目标的表征识别方法,如图1所示,包括如下步骤:步骤1,对分选后的单脉冲已知雷达辐射源目标建立针对多任务需求的电磁信号智能表征特征库,所述智能表征特征库包括雷达信号脉间信息特征、雷达辐射源特性信息特征、和雷达信号脉内信息特征;所述雷达信号脉间信息特征包括与雷达用途、类型、以及工作状态对应的多种雷达重频调制类型,所述雷达重频调制类型包括重频固定、重频参差、重频滑变、重频分组、重频抖动、正弦调制;所述辐射源特性信息特征包括与雷达工作状态对应的天线扫描方式,所述天线扫描方式包括机械扫描和电子扫描,所述机械扫描包括圆周扫描、扇形扫描、栅形扫描、圆锥扫描;还包括与相控阵雷达工作状态对应的数据率;所述雷达信号脉内信息特征包括与电磁目标信号时频能量分布对应的脉内波形。
13.所述电磁信号智能表征特征库如下表1所示。
14.步骤2,第一步,构建雷达重频调制类型的学习识别模型。
15.对分选后的单脉冲雷达信号进行重频调制类型(或称pri调制类型)的识别是一项基础工作,也是雷达工作状态分析中必不可少的一项工作。雷达辐射源重频调制类型和参数的变化多种多样,其中一些调制类型是雷达辐射源所普遍使用的,每一种辐射源重频调制类型与辐射源工作状态都有关,如下表2所示。
16.通过数学变换,线下提取雷达脉冲序列的比值特征、比重特征、频率特征、形状特征、以及自相关特征参数,作为分类器的输入;若输入的比值特征趋近于零,则该雷达脉冲序列确定为重频固定类型,若输入的比重特征趋近于零,则该雷达脉冲序列确定为重频分组类型,若输入的频率特征∈(1,2),则该雷达脉冲序列确定为重频滑变类型,若输入的形状特征∈(0.03,0.3),则该雷达脉冲序列确定为正弦调制类型,若输入的形状特征∈(0.5,0.8),则该雷达脉冲序列确定为重频抖动类型,若输入的自相关特征的峰值个数趋近于零,则该雷达脉冲序列确定为重频参差类型。
17.优选地,所述雷达重频调制类型的学习识别模型、天线扫描方式的学习识别模型、数据率的学习识别模型、脉内波形的学习识别模型均采用基于一类支持向量机作为识别器。
18.具体地,对于雷达重频调制类型的学习识别模型,所述比值特征为σ/μ,其中式中,σ为重频序列有效数值范围内的均值,μ为重频序列有效数值范围内的标准差,n为分选后的雷达信号脉冲到达时间序列长度,
n-1为重频序列的总长度,prii为重频序列的有效数值。
19.理想情况下,重频固定序列的pri值恒定不变,其σ为零,σ/μ也为零,考虑测量误差时,其σ/μ趋向于零;重频参差、重频滑变等其他重频调制序列的pri值变化范围起伏不定,其σ/μ相对较大,因此通过比值特征可以有效识别出重频固定类型。
20.具体地,对于雷达重频调制类型的学习识别模型,所述比重特征为ω,ω为dpri符号序列中数值1在整个序列中的比重值,式中,ε为toa测量误差,sgn(drrij)为符号函数,drrij为重频的差分序列,prii为重频序列的有效数值,n-1为重频序列的总长度。
21.大量实验表明,重频分组的比重特征趋近于0,而重频固定、重频参差、重频抖动、重频滑变及正弦变换的比重特征都较大。因此通过比重特征可以有效识别出重频分组类型。
22.具体地,对于雷达重频调制类型的学习识别模型,所述频率特征pf为式中,s为drri符号向量,scs
为s进行累加和归一化处理得到的特征向量,f(k)为s
cs
向量进行离散序列快速傅里叶变换,n-1为重频序列的总长度。
23.大量实验数据表明,重频滑变脉冲序列的s
cs
向量曲线的频率特征参数取值较大,若特征参数pf∈(1,2),则雷达脉冲序列为重频滑变调制序列。重频分组脉序列的s
cs
向量只在pri值跳变时出现阶跃现象,其频率特征参数取值很小,趋近于零。若特征参数pf∈(0,0.1),则雷达脉冲序列为重频分组调制序列。正弦调制和重频抖动序列的频率特征参数取值变化不定,当特征参数pf在其他数值区间时,雷达脉冲序列可能为正弦调制或重频抖动序列。因此,频率特征能够分辨出重频滑变类型。
24.具体地,对于雷达重频调制类型的学习识别模型,所述形状特征为ps,ps的计算步骤如下,步骤a,首先计算s
cs
向量元素间的变化量,步骤b,根据
∆
(k)值正负符号变化情况,统计s
cs
曲线转折点,步骤c,令常数k=1,a=0,步骤d,当1≤k≤n-5时,若
∆
(k)*
∆
(k 1)<0或
∆
(k 1)=0且
∆
(k)*
∆
(k 2)<0,则a=a 1,步骤e,当k=n-4时,若
∆
(k)*
∆
(k 1)<0,则a=a 1,步骤f,若k<n-4,k=k 1,则转到步骤d),否则转到步骤e),步骤g,p
s=
a/(n-3)。
25.ps值即是表征s
cs
向量曲线的形状特征参数,大量实验数据表明,重频抖动序列和正弦调制序列的s
cs
向量曲线的形状特征差异比较大,形状特征参数能够准确识别这两种重频样式。若特征参数ps∈(0.03,0.3),则雷达脉冲序列为正弦调制序列。若特征参数ps∈(0.5,0.8),则雷达脉冲序列为重频抖动调制序列。因此,通过ps值能够分辨出正弦调制类型和重频抖动类型类型。
26.具体地,对于雷达重频调制类型的学习识别模型,所述自相关特征参数的计算步骤如下,步骤a,定义重频序列p(n)的自相关函数为式中,p(n)为重频序列,r(k)为p(n)的自相关函数,k=0,1,......,n-2,μ
p
为重频序列的平均值,n为分选后的雷达信号脉冲到达时间序列长度;步骤b,将r(k)作归一化处理,得到规范化重频序列的自相关函数为
式中, rn(k)为规范化重频序列的自相关函数;步骤c,求出∣rn(k)∣中大于0.1的峰值个数及峰值所在位置,∣rn(k)∣中大于0.1的峰值个数即为自相关特征参数。
27.大量实验表明,重频参差的自相关特征参数趋近于0,而重频抖动的自相关特征参数较大。因此,通过自相关特征能够分辨出重频参差类型。
28.对重频固定、重频参差、重频滑变、重频分组、重频抖动、以及正弦调制这6种重频类型中分别提取比值特征、比重特征、频率特征、形状特征、以及自相关特征5个特征参数,仿真结果如图2所示。图2中横坐标中1、2、3、4、5、6依次代表重频固定、重频参差、重频滑变、重频抖动、重频分组、以及正弦调制,上述5个特征参数可以将上述6种重频类型区分开。
29.第二步,构建天线扫描方式的学习识别模型。天线扫描方式与雷达辐射源的工作状态之间存在紧密的联系,因此,利用信号幅度信息判别天线扫描方式,有助于识别辐射源的本征属性。
30.天线扫描方式包括电子扫描方式和机械扫描方式。
31.所述电子扫描方式是指采用电子技术来控制波束扫描,常用的有频扫和相扫,电子扫描天线波束在空间移动速度非常快,可以达到微妙量级,相控阵雷达主要采用电子扫描的方式来灵活控制波束指向,它至少在一个方向上采用电子扫描,侦察系统截获的信号幅度变化特性与机械扫描雷达信号幅度变化有明显区别,利用这一特征可以识别相控阵体制的雷达。
32.所述机械扫描方式如图3a~3d所示,其中图3a为圆周扫描、图3b为扇形扫描、图3c为栅形扫描、图3d为圆锥扫描。工作于搜索状态的雷达,天线采用扇形扫描或圆周扫描,扫描周期较长,侦察系统截获的信号幅度变化较大;工作于跟踪状态的雷达,天线扫描一般采用圆锥扫描,侦察系统截获的信号幅度变化范围不大。
33.构建天线扫描方式的学习识别模型,首先要对电子扫描方式和机械扫描方式进行区分,然后再对具体的机械扫描方式进行自动识别。
34.对电子扫描方式和机械扫描方式进行区分的步骤为:提取每组脉冲序列中的最大主瓣序列,确定最大主瓣序列一阶差分的绝对值中的最大值md,同时确定相邻脉冲均在同一波位内的脉冲所占比例rd,令zd=α*md β*rd,其中,α,β为特征参数的权重,且α β=1,当zd>hz时,则该雷达脉冲序列为电子扫描方式,当zd≤hz时,则该雷达脉冲序列为机械扫描方式,hz为设定的门限。
35.构建机械扫描方式的学习识别模型,线下提取峭度、主瓣个数、主瓣幅度差值、以及主瓣间隔最大比值参数,作为分类器的输入;若输入的峭度趋近于零,则该雷达脉冲序列确定为圆锥扫描方式,若主瓣个数为一,则该雷达脉冲序列确定为圆周扫描方式,若主瓣幅度差值趋近于零,则该雷达脉冲序列确定为扇形扫描方式,若主瓣间隔最大比值的变化较大,则该雷达脉冲序列确定为栅形扫描方式。
36.生成上述4种机械扫描方式(圆周扫描、扇形扫描、栅形扫描、圆锥扫描)的脉冲幅度序列样本各20组,分别提取上述峭度、主瓣个数、主瓣幅度差值、以及主瓣间隔最大比值4个特征参数,仿真结果分别如图4a~4d所示。
37.由图4a可以看出,圆锥扫描的峭度较低,这是由于接收到两者的信号是连续的脉冲串,而其他天线扫描方式则是间断的脉冲群,因此可以通过峭度将圆锥扫描与其他天线扫描方式区分开。
38.由图4b可以看出,在一个天线扫描方式内,圆周扫描只有一个主瓣,扇形扫描有2个主瓣,圆锥扫描检测不到主瓣,其他天线扫描方式一般有2个以上主瓣,因此可以通过主瓣个数将圆周扫描与其他天线扫描方式区分开。
39.由图4c可以看出,主瓣个数在2个以上的天线扫描方式中,扇形扫描的主瓣幅度差值约为0,而其他天线扫描方式的主瓣幅度差值较大,这是由于扇形扫描的俯仰向固定不变,因此可以通过主瓣幅度差值将扇形扫描区分开。
40.由图4d可以看出,主瓣个数在3个以上的天线扫描方式中,栅形扫描的主瓣间隔最大比值变化较大,这是由于光栅扫描在方位向上是来回扫描,因此可以通过主瓣间隔最大比值将光栅扫描区分开。
41.另外,对于天线扫描方式的学习识别模型,至少需要截获两个天线扫描周期的信号,才能确保正确识别天线扫描方式。对于天线扫描方式的学习识别模型,对每组脉冲信号进行最大主瓣序列的提取之前,需要对每组脉冲信序列进行归一化处理。
42.第三步,构建数据率的学习识别模型:首先根据数据率的计算公式确定数据率的数值高低,线下提取数据率参数作为分类器的输入,并根据数据率的高低确定雷达脉冲序列的搜索状态和跟踪状态。
43.所述数据率的计算公式为式中,d为数据率,n为侦收到的信号次数,t
toai
为侦收到的相控阵雷达信号序列。
44.具体地,相控阵雷达可以根据跟踪目标的多、少、远、近、重要程度以及威胁等级,采用不同的跟踪数据率,即在数据率最低的跟踪目标信号的重复周期内,安排与跟踪状态对应的数据率信号,实现对多波束信号能量的分配,并满足不同跟踪目标数据率的要求。
45.第四步,构建脉内波形的学习识别模型:线下提取在时频能量三维空间中的任意一点处的电磁目标信号分布特征,并将提取结果记录在卷积结果中,建立三维空间高阶自相关过完备特征库,通过机器学习,实现三维空间高阶自相关过完备特征库的精简,使过完备特征库适应特定的电磁目标。
46.例如,以wigner-ville变换作为雷达辐射源目标信号脉内特征时频分析的基础,得到的wvd分布物理意义明确,为信号在时间频率平面的能量密度分布,其具有良好的数学特性。wvd可以看作采用具有自适应性的窗函数的短时傅里叶变换,而这种特殊的窗函数就是信号本身,因此适用于对电磁目标信号的细节特征进行描述。电磁目标信号s(t)的wvd定义如下:
式中,t为雷达辐射源目标信号的发射时间,τ为滞后时间,z(t)为s(t)的解析信号,ω为比重特征,h[s(t)]表示s(t)的hibert变换,用解析信号z(t)的频谱来表示wvd,其形式如下:式中,ν表示频率滞后,f表示解析信号z(t)的频谱,t为雷达辐射源目标信号的发射时间,z(t)为s(t)的解析信号,τ为滞后时间,e表示自然常数。
[0047]
wvd时频能量三维空间的立体高阶自相关函数为式中,r为参考点,t为雷达辐射源目标信号的发射时间,f表示解析信号z(t)的频谱,e表示自然常数,αi表示相对参考点r的位移向量,n为侦收到的信号次数。
[0048]
在时频能量三维空间中,建立3
×3×
3的立方体参考空间单元m,则αi可以表示为以r为中心的立体空间单元m,其模型如图5所示。图5中,为了标记该参考单元的27个空间单
元,在t轴上取3个相邻空间单元记为(m-1
,m0,m
1
),每一层为一个独立的(e,f)平面。将每一个(t,x)平面划分为3
×
3的模块,分别标记对应位置为a,b,c,d,e,f,g,h,i,如图6所示。
[0049]
电磁目标在时频能量三维空间中任意的3
×3×
3立方体子空间的局部分布特征均可以表示为以r为中心点的位移αi的集合,即可以表述为一个高阶自相关函数的形式。因此,电磁目标在时频能量三维空间分布的细节特征要素信息可以通过一组高阶自相关函数表示。而这些高阶自相关函数相互并不正交,因此以高阶自相关函数为特征组构建的特征库是过完备的。
[0050]
通过特征库学习实现精简现有的多维空间过完备特征库,使特征库适应特定的电磁目标,从而在现有特征库中遴选特定目标表征效率最高的子集。
[0051]
步骤3),将雷达重频调制类型的学习识别模型、天线扫描方式的学习识别模型、数据率的学习识别模型、以及脉内波形的学习识别模型作为训练样本,通过深度神经网络对训练样本进行特征学习训练,获得适应典型任务应用的已知雷达辐射源目标的智能表征模型,再通过该深度神经网络对未知雷达辐射源目标的工作模式进行迁移学习,根据所执行的任务属性类别,选取相应的智能表征模型,实现基于任务属性的未知雷达辐射源目标的准确表征。
[0052]
优选地,所述深度神经网络为堆栈式隐层共享式自动编码机。
[0053]
本实施例以岛礁攻防为测试背景,应用电磁频谱战信号级仿真系统为验证平台,并根据实际地形掩蔽、气象影响等因素生成仿真试验环境,对本发明提出的基于任务属性的未知雷达辐射源目标智能识别方法进行验证,如图7所示,由内向外的曲线分别表示海拔高度为100m、500m、1000m、3000m、5000m、8000m、10000m的组网雷达合成威力曲线。
[0054]
根据《世界海用雷达手册》,仿真生成10部雷达辐射源目标用于测试,其中雷达辐射源目标t9为多功能雷达,具有导航、搜索、跟踪、火控等雷达工作模式,13种雷达信号形式如表3所示:
上表3中,t1~t8、t10雷达辐射源目标信息已知,t9导航工作模式信息已知,搜索、跟踪、火控工作模式信息为未知。
[0055]
根据已知雷达辐射目标t1、t2、t4、t5、t7、t8生成50000组测试样本,对本发明基于任务属性的未知雷达辐射源目标的表征识别方法进行测试,平均识别准确率如图8所示。由图8可知,在0db到15db信噪比空间内,已知雷达辐射源目标的识别准确率基本≥90%。
[0056]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。