1.本发明涉及电子节气门技术,具体涉及一种多功能无人机节气门驱动电路。
背景技术:
2.主流的无人机节气门采用车辆领域广泛应用的以直流电机为节气门驱动的电子节气门;而受无人机控制领域广泛应用的舵机影响,一些无人机也采用舵机作为节气门驱动。舵机是一种包含了驱动电路的电机,仅需提供脉宽调制信号即可驱动,但受制于集成的驱动电路,驱动电压通常不超过7.4v;而电子节气门驱动通常采用成熟的全桥式驱动电路,驱动电压为12v或24v。受驱动电压、驱动方式等差异的影响,无人机电子控制单元中,驱动电路和控制策略需要根据节气门驱动类型作调整。
3.现有技术中,针对无人机节气门中的电机或舵机,需要采用各自独立的驱动电路及控制策略,暂无兼容电机和舵机的驱动方案。
4.节气门的工作角度最大为90
°
,在极限位置处设有机械限位装置,电子节气门的电机驱动根据节气门位置传感器反馈,控制节气门开度在工作角度内。舵机的工作角度一般为180
°
,因而无人机出厂前需要对安装位置进行人工标定,避免设定的工作角度超出极限位置导致舵机堵转而烧毁。
技术实现要素:
5.发明目的:本发明的目的在于解决现有技术中存在的不足,提供一种多功能无人机节气门驱动电路,可以兼容电机和舵机,以及主动识别节气门驱动类型并自动标定的驱动控制策略。
6.技术方案:本发明的一种多功能无人机节气门驱动电路,包括电子控制单元和节气门体,电子控制单元包括微控制器、智能高侧开关、供电模块、全桥驱动单元和节气门位置信号调理电路,节气门体中包括舵机或电机,以及节气门位置传感器;节气门位置传感器实时获取当前节气门位置信号tp,并传输至节气门位置信号调理电路,节气门位置信号调理电路则将接收到的节气门位置信号tp经过两路tvs管限压保护和rc滤波后转换成节气门位置调理信号tps(tvs管防浪涌用于避免信号电压超出单片机工作电压范围导致的单片机损坏;rc滤波用于消除信号中夹杂的干扰信号),并将节气门位置调理信号tps输入至微控制器;供电模块将输入电压降低至驱动节气门所需电压输出,并根据微控制器的电压控制信号来调节输出电压;供电模块分为两路,一路是为全桥驱动单元供电,另一路是经智能高侧开关为舵机供电;智能高侧开关检测舵机驱动电流,若舵机出现堵转,舵机驱动电流超过设定阈值,智能高侧开关则向微控制器发送过电流警告信号oc(over current);微控制器输出可以识别节气门驱动类型的驱动信号drv1和drv2,经由全桥驱动单元驱动电机或舵机运转。微控制器根据节气门位置调理信号tps的变化趋势,以及智能高侧开关的过电流警告信号oc,共同判定当前节气门驱动类型,并相应输出电压控制信号vc,随后进行节气门开度自动标定。(例如微控制器控制第一路驱动信号drv1输出周期20ms、脉宽0.5ms的脉宽调制
信号,该脉宽调制信号可使舵机运转至最小角度,也可使电机运转至最大位置,微控制器以节气门位置调理信号tps为主,过电流警告信号oc为辅,即可判定节气门驱动类型,再输出电压控制信号vc,将驱动电压v
drv
调整为驱动舵机所需的7.2v或驱动电机所需的12v,随后进行节气门开度自动标定)。
7.进一步地,所述全桥驱动单元收到微控制器输入的两路驱动信号drv1和drv2后,再由out1和out2输出驱动;驱动电机时,全桥电路可控制电机正转、反转、惯性转动和制动;驱动舵机时,全桥电路等效为两路独立的半桥驱动,将微控制器输出的两路驱动信号增强后输出。为避免两路驱动信号drv1和drv2信号均为高电平导致全桥芯片的自动拉低保护,微控制器将drv1和drv2信号调节为相位差180
°
的异步驱动信号,从而实现两路舵机同时驱动。
8.进一步地,当电机或舵机的驱动功率较低时,供电模块及输出电压调节方法如下;此时为降低供电模块复杂度,供电模块使用低压降线性稳压器ldo芯片(例如tps7b86),通过ldo芯片将蓄电池电压vbat转化为驱动电机或舵机所需的驱动电压vdrv,ldo芯片输出电压经高侧电阻和低侧电阻分压后输入反馈引脚fb,并与内部基准电压比较后反馈控制输出电压,此时输出电压调节公式如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式(1)其中反馈电压v
fb
为0.65v,驱动电压vdrv后接分压电阻、分压电阻、分压电阻以及三极管q11,q11为npn型三级管且由微控制器输出的电压控制信号vc(voltage control)控制;当电压控制信号vc为低电平时,三极管q11的集电极和发射极断路,此时的高侧电阻和低侧电阻分别为:当电压控制信号vc为高电平时,三极管q11的集电极和发射极导通,分压电阻r12两侧短路,此时的高侧电阻和低侧电阻分别为:代入式(1)可知,电压控制信号vc为低电平时,输出电压为12v,适用于驱动电机;电压控制信号vc为高电平时,输出电压为7.2v,适用于驱动舵机。
9.进一步地,当电机或舵机的驱动功率较高时,供电模块及输出电压调节方法如下;供电模块使用直流/直流开关稳压器dc/dc芯片(例如采用tps54560),通过dc/dc芯片将蓄电池电压vbat转化为驱动电机或舵机所需的驱动电压vdrv,dc/dc芯片输出电压经高侧电阻和低侧电阻分压后输入反馈引脚fb,并与内部基准电压比较后反馈控制输出电压,此时输出电压调节公式如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式(2)
其中反馈电压v
fb
为0.8v,驱动电压vdrv后接分压电阻、分压电阻、分压电阻以及三极管q21,q21为npn型三级管,且由微控制器输出的电压控制信号vc控制;当电压控制信号vc为低电平时,三极管q21的集电极和发射极断路,此时的高侧电阻和低侧电阻分别为:当电压控制信号vc为高电平时,三极管q11的集电极和发射极导通,分压电阻r12两侧短路,此时的高侧电阻和低侧电阻分别为:代入式(2)可知,电压控制信号vc为低电平时,输出电压为12v,适用于驱动电机;电压控制信号vc为高电平时,输出电压为7.2v,适用于驱动舵机。
10.进一步地,为减小pcb空间占用,全桥驱动单元采用集成全桥驱动芯片(例如采用drv8872),全桥驱动芯片接收微控制器输出的两路控制信号drv1和drv2,并输出驱动out1和out2。
11.全桥驱动芯片包括四个n沟道mosfet芯片q1至q4,芯片q1和q3由drv1信号控制,q2和q4由drv2信号控制;输出驱动out1和out2连接至电机b3两侧。当drv1信号为高电平,drv2信号为低电平,此时q1、q3开启,q2、q4关断,电流由vdrv经q1,由out1输出至电机b3并从out2输入,再经过q3接地,实现电机正转;同理,当drv1信号为低电平,drv2信号为高电平时,电机反转。
12.当驱动舵机时,输出驱动out1和out2之间断路,全桥驱动单元视为两组半桥电路,第一组半桥包括芯片q1、q2,由drv1信号控制,out1输出驱动,当drv1信号为高电平时,q1开启,out1输出高电平;第二组半桥包括芯片q3、q4,由drv2信号控制,out2输出驱动,当drv2信号为高电平时,q4开启,out2输出高电平。
13.为避免芯片q1和芯片q2同时开启或者芯片q3和芯片q4同时开启而导致的短路,控制信号drv1和drv2不得同时为高电平,全桥芯片内部也集成了逻辑门使得drv1和drv2同时为高电平时关闭所有mosfet芯片。
14.进一步地,为避免舵机堵转导致的烧毁,通过智能高侧开关(例如采用tps1h200a芯片)在驱动电流超过设定阈值后发送过电流警告信号oc,并通过开关状态的切换使得输出电流稳定在设定阈值。同时还因delay引脚上拉进入自动重试模式,在自动重试模式中高侧开关会在关闭约1s后自动开启约40ms并再次检测是否仍为过电流状态,其开启时间满足两路舵机异步驱动信号输入舵机,从而实现故障的持续检测。
15.其限流电阻设置如下:;是指限流内部阈值电压;是指输出电流与限流设定阈值之比,例如取值2500。
16.进一步地,所述电子控制单元上电后,微控制器开始识别节气门类型,具体过程如
下:步骤s1、为避免供电电压过高损毁舵机,微控制器向供电模块输出电压控制信号vc,调节供电模块的输出电压v
drv
为7.2v;步骤s2、微控制器根据节气门位置调理信号tps获取当前节气门位置tp0;步骤s3、微控制器控制第一路驱动信号drv1输出周期20ms、脉宽0.5ms的脉宽调制信号,该脉宽调制信号可使舵机运转至最小角度;同时微控制器检测节气门位置调理信号tps和智能高侧开关的信号,如果检测到节气门位置连续1秒内无变化,或者检测到过电流警告信号oc,则停止输出脉宽调制信号,记录当前节气门位置tp1;微控制器控制第一路驱动信号drv1输出周期20ms、脉宽2.5ms的脉宽调制信号,该脉宽调制信号可使舵机运转至最大角度;同时微控制器检测节气门位置调理信号tps和智能高侧开关的信号,如果检测到节气门位置连续1秒内无变化,或者检测到过电流警告信号oc,则停止输出脉宽调制信号,记录当前节气门位置tp2;如果tp1≤tp0<tp2或tp1<tp0≤tp2,即可判定当前节气门驱动类型为第一路驱动信号控制的舵机驱动,否则,继续执行步骤s4:步骤s4、微控制器控制第二路驱动信号drv2输出周期20ms、脉宽0.5ms的脉宽调制信号,该脉宽调制信号可使舵机运转至最小角度;同时微控制器检测节气门位置调理信号tps和智能高侧开关的信号,如果检测到节气门位置连续1秒内无变化,或者检测到过电流警告信号oc,则停止输出脉宽调制信号,记录当前节气门位置tp3;微控制器控制第二路驱动信号drv2输出周期20ms、脉宽2.5ms的脉宽调制信号,该脉宽调制信号可使舵机运转至最大角度;同时微控制器检测节气门位置调理信号tps和智能高侧开关的信号,如果检测到节气门位置连续1秒内无变化,或者检测到过电流警告信号oc,则停止输出脉宽调制信号,记录当前节气门位置tp4;如果tp3≤tp0=tp1=tp2<tp4或tp3<tp0=tp1=tp2≤tp4,即可判定当前节气门驱动类型为第二路驱动信号控制的舵机驱动;如果tp3=tp4≤tp0《tp1=tp2或tp3=tp4《tp0≤tp1=tp2,则判定当前节气门驱动类型为电机驱动,但考虑到可能存在驱动电压和驱动占空比过低无法驱动电机导致节气门位置无变化,即tp0=tp1=tp2=tp3=tp4,则继续执行步骤s5:步骤s5、微控制器输出电压控制信号vc,调节供电模块输出电压为电机工作电压(通常为12v);步骤s6、微控制器控制第一路驱动信号drv1输出周期1ms、占空比50%的脉宽调制信号,该脉宽调制信号可使电机正转;同时微控制器检测节气门位置信号,如果检测到节气门位置连续1秒内无变化,则停止输出脉宽调制信号,记录当前节气门位置tp5;微控制器控制第二路驱动信号drv2输出周期1ms、占空比50%的脉宽调制信号,该脉宽调制信号可使电机反转;同时微控制器检测节气门位置信号和,如果检测到节气门位置连续1秒内无变化,则停止输出脉宽调制信号,记录当前节气门位置tp6;如果tp6≤tp0<tp5或tp6<tp0≤tp5,则判定当前节气门驱动类型为电机驱动;步骤s7、如果执行完步骤s1至步骤s6后,未能识别出节气门驱动类型,则报错并提醒无人机操作人员检查节气门系统。
17.进一步地,如果微控制器识别到当前节气门驱动类型为舵机驱动后,进行节气门
开度标定的具体过程为:步骤1)、微控制器控制对应舵机的一路驱动信号输出周期20ms、脉宽1.5ms的脉宽调制信号,该脉宽调制信号使舵机运转至中间角度;步骤2)、微控制器逐步减小输出脉宽调制信号的驱动脉宽,同时检测节气门位置调理信号tps和智能高侧开关的信号,如果检测到节气门位置接近tp1或tp3(此处由于tp1和tp3均是电压值,因此只需当目前电压值与tp1或tp3的电压差很小的时候,就判断为接近,例如电压差小于0.5v),缓慢减小驱动脉宽,直至检测到过电流警告信号oc,停止输出脉宽调制信号,并记录出现过电流警告信号oc前的最小驱动脉宽t
min
及其对应的节气门位置tp7;微控制器逐步增大输出脉宽调制信号的驱动脉宽(例如可以在检测到节气门位置tp7后,先将驱动脉宽回到中间角度,在逐步增大输出,这样可以提高效率),同时检测节气门位置调理信号和智能高侧开关的信号,如果检测到节气门位置接近tp2或tp4,缓慢增大驱动脉宽,直至检测到过电流警告信号oc,停止输出脉宽调制信号,并记录出现过电流警告信号oc前的最大驱动脉宽t
max
及其对应的节气门位置tp8;步骤3、设定节气门最小开度tpmin= tp7,最大开度tpmax= tp8,此时完成节气门开度自动标定,节气门开度throttle与节气门位置tp的关系为:为控制节气门位置至节气门开度throttle,微控制器输出舵机驱动信号的驱动脉宽t为:。
18.进一步地,如果微控制器识别到当前节气门驱动类型为电机驱动后,进行节气门开度标定的具体过程为:微控制器控制第一路驱动信号drv1输出周期1ms、占空比50%的脉宽调制信号,该脉宽调制信号使电机正转;同时微控制器检测节气门位置信号,如果检测到节气门位置连续1秒内无变化,则停止输出脉宽调制信号,记录当前节气门位置tp5;微控制器控制第二路驱动信号drv2输出周期1ms、占空比50%的脉宽调制信号,该脉宽调制信号使电机反转;同时微控制器检测节气门位置信号,如果检测到节气门位置连续1秒内无变化,则停止输出脉宽调制信号,记录当前节气门位置tp6;设定节气门最大开度tp
max
= tp5,最小开度tp
min
= tp6,此时完成节气门开度自动标定;节气门开度throttle与节气门位置tp的关系为:微控制器根据当前节气门开度throttle和目标节气门开度的偏差执行pid反馈控制,即可实现节气门驱动和节气门开度反馈控制。
19.有益效果:与现有技术相比,本发明具有以下优点:(1)、本发明驱动电路可兼容驱动一路电机或两路舵机,避免了电子控制单元的重复开发。相比于电机、舵机分别驱动方案,减少了元器件数量和接插件引脚数,便于电子控
制单元的小型化。
20.(2)、本发明驱动控制策略包含了节气门驱动类型识别功能,可在开机自检阶段自动识别当前节气门驱动的类型,并采用相应的控制策略,无需人工干预。
21.(3)本发明驱动控制策略包含自动标定功能,安装节气门时仅需控制节气门开度最大最小极限位置的准确性,降低了装配难度;标定后的舵机工作角度与节气门工作角度一致,消除了因堵转而烧毁的风险。
22.(4)本发明驱动电路在驱动舵机时,由于舵机的驱动信号与工作角度线性映射,可在没有节气门位置传感器的条件下,依靠过电流检测信号oc,完成舵机的识别和自动标定。
附图说明
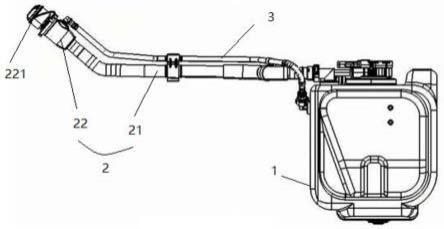
23.图1为本发明中的整体结构示意图;图2为本发明中采用低压降线性稳压器的供电模块示意图;图3为本发明中采用直流/直流开关稳压器的供电模块示意图;图4为本发明中全桥驱动单元示意图;图5为本发明中全桥驱动芯片原理示意图;图6为本发明中智能高侧开关示意图;图7为本发明中节气门位置信号调理电路示意图;图8为本发明中微控制器示意图;图9为实施例中舵机用两路异步驱动信号示意图。
具体实施方式
24.下面对本发明技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例。
25.如图1所示,本发明的一种多功能无人机节气门驱动电路,包括电子控制单元和节气门体,电子控制单元包括微控制器、智能高侧开关、供电模块、全桥驱动单元和节气门位置信号调理电路,节气门体中包括舵机或电机,以及节气门位置传感器;节气门位置传感器实时获取当前节气门位置信号tp,并传输至节气门位置信号调理电路,节气门位置信号调理电路则将接收到的节气门位置信号tp经过两路tvs管限压保护和rc滤波后转换成节气门位置调理信号tps(tvs管防浪涌用于避免信号电压超出单片机工作电压范围导致的单片机损坏;rc滤波用于消除信号中夹杂的干扰信号),并将节气门位置调理信号tps输入至微控制器,如图7所示;供电模块将输入电压降低至节气门驱动所需电压输出,并根据微控制器的电压控制信号来调节输出电压;供电模块分为两路,一路是为全桥驱动单元供电,另一路是经智能高侧开关为舵机供电;智能高侧开关检测舵机驱动电流,若舵机出现堵转,舵机驱动电流超过设定阈值,智能高侧开关则向微控制器发送过电流警告信号oc。
26.微控制器输出可以识别节气门驱动类型的驱动信号drv1和drv2,经由全桥驱动单元驱动电机或舵机运转。微控制器根据节气门位置调理信号tps的变化趋势,以及智能高侧开关的过电流警告信号oc,共同判定当前节气门驱动类型,并相应输出电压控制信号vc,随后进行节气门开度自动标定。(例如微控制器控制第一路驱动信号drv1输出周期20ms、脉宽0.5ms的脉宽调制信号,该脉宽调制信号可使舵机运转至最小角度,也可使电机运转至最大
位置,微控制器以节气门位置调理信号tps为主,过电流警告信号oc为辅,即可判定节气门驱动类型,再输出电压控制信号vc,将驱动电压v
drv
调整为驱动舵机所需的7.2v或驱动电机所需的12v,随后进行节气门开度自动标定)。
27.如图8所示,本实施例的微控制器有三路输出通道,一路io通道输出vc信号控制驱动电压,两路pwm通道输出驱动信号drv1和drv2 ,还有一路输出捕捉ioc通道获取过电流警告信号oc,以及一路模数转换通道获取节气门开度tps。
28.如图2所示,当电机或舵机的驱动功率较低时,供电模块的输出电压调节方法如下;供电模块使用低压降线性稳压器ldo芯片(例如tps7b86),通过ldo芯片将蓄电池电压vbat转化为驱动电机或舵机所需的驱动电压vdrv,ldo芯片输出电压经r
hs
和r
ls
分压后输入反馈引脚fb,并与内部基准电压比较后反馈控制输出电压,此时输出电压调节公式如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式(1)其中v
fb
为0.65v,驱动电压vdrv后接分压电阻、分压电阻、分压电阻以及三极管q11,q11为npn型三级管且由微控制器输出的电压控制信号vc(voltage control)控制;当电压控制信号vc为低电平时,三极管q11的集电极和发射极断路,此时的r
hs
和r
ls
分别为:当电压控制信号vc为高电平时,三极管q11的集电极和发射极导通,分压电阻r12两侧短路,此时的r
hs
和r
ls
分别为:代入式(1)可知,电压控制信号vc为低电平时,输出电压为12v,适用于驱动电机;电压控制信号vc为高电平时,输出电压为7.2v,适用于驱动舵机。
29.如图3所示,当电机或舵机的驱动功率较高时,供电模块的输出电压调节方法如下;供电模块使用直流/直流开关稳压器dc/dc芯片(例如采用tps54560),通过dc/dc芯片将蓄电池电压vbat转化为驱动电机或舵机所需的驱动电压vdrv,dc/dc芯片输出电压经r
hs
和r
ls
分压后输入反馈引脚fb,并与内部基准电压比较后反馈控制输出电压,此时输出电压调节公式如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
式(2)其中v
fb
为0.8v,驱动电压vdrv后接分压电阻、分压电阻、分压电阻以及三极管q21,q21为npn型三级管,且由微控制器输出的电压控制信号vc控制;当电压控制信号vc为低电平时,三极管q21的集电极和发射极断路,此时的r
hs
和rls
分别为:当电压控制信号vc为高电平时,三极管q11的集电极和发射极导通,分压电阻r12两侧短路,此时的r
hs
和r
ls
分别为:代入式(2)可知,电压控制信号vc为低电平时,输出电压为12v,适用于驱动电机;电压控制信号vc为高电平时,输出电压为7.2v,适用于驱动舵机。
30.如图4所示,本实施例的全桥驱动单元收到微控制器发出的两路驱动信号drv1和drv2后,由out1和out2输出驱动。驱动电机时,全桥电路可控制电机正转、反转、惯性转动和制动;驱动舵机时,全桥电路等效为两路独立的半桥驱动,将微控制器输出的两路驱动信号增强后输出。为避免两路驱动信号drv1和drv2信号均为高电平导致全桥芯片的自动拉低保护,微控制器将drv1和drv2信号调节为相位差180
°
的异步驱动信号,如图9所示,从而实现两路舵机同时驱动。为减小pcb空间占用,全桥驱动单元采用集成全桥驱动芯片(例如采用drv8872),全桥驱动芯片接收微控制器输出的两路控制信号drv1和drv2,并输出驱动out1和out2。
31.如图5所示,本实施例的全桥驱动芯片包括四个n沟道mosfet芯片q1至q4,芯片q1和q3由drv1信号控制,q2和q4由drv2信号控制;输出驱动out1和out2连接至电机b3两侧。当drv1信号为高电平,drv2信号为低电平,此时q1、q3开启,q2、q4关断,电流由vdrv经q1,由out1输出至电机b3并从out2输入,再经过q3接地,实现电机正转;同理,当drv1信号为低电平,drv2信号为高电平时,电机反转。
32.当驱动舵机时,输出驱动out1和out2之间断路,全桥驱动单元视为两路半桥电路,第一组半桥包括芯片q1、q2,由drv1信号控制,out1输出驱动,当drv1信号为高电平时,q1开启,out1输出高电平;第二组半桥包括芯片q3、q4,由drv2信号控制,out2输出驱动,当drv2信号为高电平时,q4开启,out2输出高电平。为避免芯片q1和芯片q2同时开启或者芯片q3和芯片q4同时开启而导致的短路,控制信号drv1和drv2不得同时为高电平,全桥芯片内部也集成了逻辑门使得drv1和drv2同时为高电平时关闭所有mosfet芯片。
33.如图6所示,为避免舵机堵转导致的烧毁,通过智能高侧开关(例如采用tps1h200a芯片)在驱动电流超过设定阈值后发送过电流警告信号oc,并通过开关状态的切换使得输出电流稳定在设定阈值。同时还因delay引脚上拉进入自动重试模式,在自动重试模式中会在关闭约1s后自动开启约40ms并再次检测是否仍为过电流状态,其开启时间满足两路舵机异步驱动信号输入舵机,从而实现故障的持续检测。
34.其限流电阻设置如下:例如若舵机采用mg996r,工作电压为4.8v-7.2v,工作电流为500ma-900ma,堵转电流为2.5a,因此设置阈值电流为2a,根据限流计算公式,得r42阻值。
35.实施例1
本实施例中,节气门体使用电机驱动,节气门位置传感器经过出厂标定,在最小最大位置输出电压分别为0.5v和4.5v。电子控制单元上电后,按以下步骤执行。
36.步骤s1、 微控制器调节电压控制信号vc为高电平,此时供电模块的输出电压为7.2v;步骤s2、微控制器获取当前节气门位置调理信号tps的实时值tp0;步骤s3、微控制器控制第一路驱动信号drv1输出周期20ms、脉宽0.5ms的脉宽调制信号。由于目前驱动对象为电机,电机正转使得节气门开度逐渐增加,且智能高侧开关不会反馈过电流警告信号oc。当节气门转动至最大位置时,电机堵转,节气门开度不再变化,微控制器检测到节气门位置调理信号1s内无变化,主动关闭第一路驱动信号drv1。此时节气门位置调理信号tps的实时值tp1对应的电压值约为4.5v;微控制器控制第一路驱动信号drv1输出周期20ms、脉宽2.5ms的脉宽调制信号,该信号同样使得电机正转,但电机已处于最大位置,微控制器检测到节气门位置调理信号1s内无变化,主动关闭第一路驱动信号drv1。此时节气门位置调理信号tps的实时值tp2对应的电压值约为4.5v。
37.步骤s4、微控制器控制第二路驱动信号drv2输出周期20ms、脉宽0.5ms的脉宽调制信号。该信号使得电机反转,节气门开度逐渐减小。当节气门转动至最小位置时,电机堵转,节气门开度不再变化,微控制器检测到节气门位置调理信号1s内无变化,主动关闭第一路驱动信号drv2。此时节气门位置调理信号tps的实时值tp3对应的电压值约为0.5v;微控制器控制第二路驱动信号drv2输出周期20ms、脉宽2.5ms的脉宽调制信号,该信号同样使得电机反转,但电机已处于最小位置,微控制器检测到节气门位置调理信号1s内无变化,主动关闭第二路驱动信号drv2。此时节气门位置调理信号tps的实时值tp4对应的电压值约为0.5v。
38.此时,根据tp4=tp3 《tp1=tp2即可判定当前节气门驱动类型为电机驱动。
39.步骤s5、微控制器调节电压控制信号vc为低电平,使得供电模块的输出电压为适用于电机的12v。
40.步骤s6、微控制器控制第一路驱动信号drv1输出周期1ms、占空比50%的脉宽调制信号,该信号使得电机正转;节气门转动至最大位置时,电机堵转,节气门开度不再变化,微控制器检测到节气门位置调理信号1s内无变化,主动关闭第一路驱动信号drv1。此时节气门位置调理信号tps的实时值tp5对应的电压值约为4.5v;微控制器控制第二路驱动信号drv2输出周期1ms、占空比50%的脉宽调制信号,该信号使得电机反转;节气门转动至最小位置时,电机堵转,节气门开度不再变化,微控制器检测到节气门位置调理信号1s内无变化,主动关闭第二路驱动信号drv2。此时节气门位置调理信号tps的实时值tp6对应的电压值约为0.5v。
41.由于驱动电压和驱动占空比的提升,电机的堵转扭矩有所增加,因而可能会出现tp5》 tp1=tp2及tp6《 tp4=tp3的情况。因而采用电机驱动节气门时,节气门开度的自动标定以tp5和tp6为准,即节气门最大开度tp
max
= tp5,最小开度tp
min
= tp6,节气门开度throttle与节气门位置tp的关系为:
微控制器根据当前节气门开度throttle和目标节气门开度的偏差执行pid反馈控制,即可实现节气门驱动和节气门开度反馈控制。
42.实施例2:本实施例中,节气门体使用舵机驱动,舵机驱动引脚对应全桥驱动电路的out1,节气门位置传感器经过出厂标定,在最小最大位置输出电压分别为0.5v和4.5v。电子控制单元上电后,按以下步骤执行。
43.步骤s1、 微控制器调节电压控制信号vc为高电平,此时供电模块的输出电压为7.2v;步骤s2、微控制器获取当前节气门位置调理信号tps的实时值tp0;步骤s3、微控制器控制第一路驱动信号drv1输出周期20ms、脉宽0.5ms的脉宽调制信号。由于目前驱动对象为舵机,舵机向最小角度运转使得节气门开度逐渐减小并在最小位置处堵转,智能高侧开关反馈过电流警告信号oc,微控制器主动关闭第一路驱动信号drv1。此时节气门位置调理信号tps的实时值tp1对应的电压值约为0.5v;微控制器控制第一路驱动信号drv1输出周期20ms、脉宽2.5ms的脉宽调制信号。舵机向最大角度运转使得节气门开度增大并在最大位置处堵转,智能高侧开关反馈过电流警告信号oc,微控制器主动关闭第一路驱动信号drv1。此时节气门位置调理信号tps的实时值tp2对应的电压值约为4.5v;此时,根据tp1 《 tp2即可判定当前节气门驱动类型为第一路驱动信号drv1控制的舵机驱动。随后进行节气门开度标定,按以下步骤执行。
44.步骤1)、微控制器控制第一路驱动信号drv1输出周期20ms、脉宽1.5ms的脉宽调制信号,该脉宽调制信号使舵机运转至中间角度;步骤2)、微控制器控制第一路驱动信号drv1按照每周期减少100us脉宽的方式输出脉宽调制信号,同时检测节气门位置调理信号tps和智能高侧开关过电流警告信号oc,如果检测到节气门位置接近tp1,再以每周期减少10us脉宽的方式输出脉宽调制信号,直至检测到过电流警告信号oc。此时停止输出脉宽调制信号,并记录出现过电流警告信号前的最小驱动脉宽t
min
及其对应的节气门位置tp7;步骤3)、微控制器控制第一路驱动信号drv1输出周期20ms、脉宽1.5ms的脉宽调制信号,该脉宽调制信号使舵机运转至中间角度;步骤4)、微控制器控制第一路驱动信号drv1按照每周期增加100us脉宽的方式输出脉宽调制信号,同时检测节气门位置调理信号tps和智能高侧开关过电流警告信号oc,如果检测到节气门位置接近tp2,再以每周期增加10us脉宽的方式输出脉宽调制信号,直至检测到过电流警告信号oc。此时停止输出脉宽调制信号,并记录出现过电流警告信号前的最小驱动脉宽t
max
及其对应的节气门位置tp8;设定节气门最小开度tpmin= tp7,最大开度tpmax= tp8,此时完成节气门开度自动标定,节气门开度throttle与节气门位置tp的关系为:为控制节气门位置至节气门开度throttle,微控制器输出舵机驱动信号的驱动脉宽t为:
。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。