技术特征:
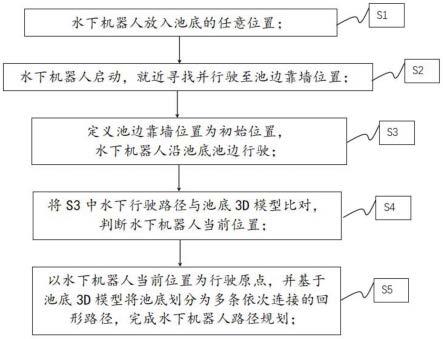
1.一种基于超声波雷达的水下机器人路径规划方法,其特征在于,用于对水下机器人在池底的水下行驶路径进行规划,包括以下步骤:s1、水下机器人放入池底的任意位置;s2、水下机器人启动,就近寻找并行驶至池边靠墙位置;s3、定义池边靠墙位置为初始位置,水下机器人沿池底池边行驶;s4、将s3中水下行驶路径与池底3d模型比对,判断水下机器人当前位置;s5、以水下机器人当前位置为行驶原点,并基于池底3d模型将池底划分为多条依次连接的回形路径,完成水下机器人路径规划。2.根据权利要求1所述的水下机器人路径规划方法,其特征在于,步骤s2中,水下机器人启动,就近寻找并行驶至池边靠墙位置的方法包括:s201、水下机器人以s1中放置的位置为起点,向任意方向行驶;s202、基于超声波雷达探头实时发出的超声波信号,寻找池边靠墙位置;s203、超声波雷达探头未接收到反馈信号时,则未找到池边靠墙位置,水下机器人沿s201中路径继续行驶;当超声波雷达探头接收到反馈信号时,则找到池边靠墙位置,进入执行s204;s204、寻找到池边靠墙位置后,调整水下机器人行驶方向,以最短距离向池边靠墙位置行驶直至行驶至池边靠墙位置。3.根据权利要求1所述的水下机器人路径规划方法,其特征在于,步骤s2中,水下机器人启动,就近寻找并行驶至池边靠墙位置的方法包括:s211、水下机器人以s1中放置的位置为起点;s212、基于超声波雷达探头实时发出的超声波信号,寻找池边靠墙位置;s213、超声波雷达探头未接收到反馈信号时,则未找到池边靠墙位置,水下机器人向任意方向行驶,并执行s212直至寻找到池边靠墙位置,进入执行s214;当超声波雷达探头接收到反馈信号时,则找到池边靠墙位置,进入执行s214;s214、寻找到池边靠墙位置后,调整水下机器人行驶方向,以最短距离向池边靠墙位置行驶直至行驶至池边靠墙位置。4.根据权利要求2或3所述的水下机器人路径规划方法,其特征在于,水下机器人寻找池边靠墙位置以及以最短距离行驶至池边靠墙位置的过程中,还包括:实时获取水下机器人行驶时的当前方向角,并依据当前方向角与前一时刻方向角调整水下机器人行驶方向,使水下机器人的当前行驶方向与上一时刻行驶方向保持一致。5.根据权利要求1所述的水下机器人路径规划方法,其特征在于,步骤s4中,池底3d模型的获取方法为:根据池底池边轮廓在智能终端中预置生成,或实时采集水下机器人沿池底池边走形一周并实时测距及扫描后形成。6.根据权利要求5所述的水下机器人路径规划方法,其特征在于,池底3d模型在智能终端中预置生成后,还对预置生成的池底3d模型进行评估;评估方法为:使水下机器人沿池底池边行驶一周获取水下行驶路径,将采集的水下行驶路径与预置生成的池底3d模型进行匹配分析。7.根据权利要求1所述的水下机器人路径规划方法,其特征在于,步骤s5中,相邻回形
路径之间具有0~20%的重叠度。8.根据权利要求1、2、3、5~7任一项所述的水下机器人路径规划方法,其特征在于,水下机器人路径规划方法还包括:s61、基于池底3d模型和用户需求,采用s5中方法对若干个池底重点区域规划回形路径。9.根据权利要求1、2、3、5~7任一项所述的水下机器人路径规划方法,其特征在于,水下机器人路径规划方法还包括:s62、对水下机器人路径规划结果进行评估,以及依据评价结果对水下机器人在池底下一次水下行驶路径进行优化。10.一种水下机器人,包括水下行驶路径规划系统,其特征在于,所述水下行驶路径规划系统用于在水下环境中,对水下机器人在池底的水下行驶路径规划。
技术总结
本发明提供了一种基于超声波雷达的水下机器人路径规划方法及水下机器人,用于对水下机器人在池底的水下行驶路径进行规划,路径规划方法包括水下机器人放入池底的任意位置;水下机器人启动,就近寻找并行驶至池边靠墙位置;定义池边靠墙位置为初始位置,水下机器人沿池底池边行驶;将水下行驶路径与池底3D模型比对,判断水下机器人当前位置;以水下机器人当前位置为行驶原点,并基于池底3D模型将池底划分为多条依次连接的回形路径,完成水下机器人路径规划。本发明设计的路径规划方法能够实现池底的水下机器人准确定位、快速高效的进行作业、保证作业质量、减少水下机器人损耗的目的。的。的。
技术研发人员:赵飞 赵冶
受保护的技术使用者:深圳众清人居科技有限公司
技术研发日:2022.06.13
技术公布日:2022/9/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。