具有输入的电动液压伺服阀控制
优先权要求
1.本技术要求于2020年2月7日提交的美国专利申请第16/784,864号的优先权,该申请的全部内容通过引用结合于此。
技术领域
2.本说明书涉及用于电动液压伺服阀的控制系统。
背景技术:
3.电动液压伺服阀(ehsv)被用于对组件(诸如燃油阀、致动器或开关阀)的电动液压控制。在一些应用中,ehsv可被配置为提供液压功率,以平移线性或旋转致动器的位置。利用位置反馈,ehsv可被配置为驱动致动器的位置。
4.飞行器包括控制一个或多个可调整表面组件(诸如例如,副翼、方向舵和升降机)的液压伺服控制系统。常规的液压伺服控制系统基于包括各种模拟电子设备以测量指示表面组件当前位置的一个或多个模拟信号的模拟电子拓扑结构。然后将模拟信号与模拟设定点值进行比较。确定模拟信号与模拟设定点值之间的误差,并且主动调整表面组件以保持最小误差。
技术实现要素:
5.大体上,本文档描述了用于电动液压伺服阀的控制系统。
6.在第一方面中,一种控制器装置包括数字控制器,数字控制器被配置为基于设定点和差分模拟反馈信号来提供数字位置信号;以及转换器电路,转换器电路被配置为基于数字位置信号来提供差分模拟电动液压伺服阀位置控制信号,并且基于差分模拟电动液压伺服阀位置控制信号来提供差分模拟反馈信号。
7.在第二方面中,根据方面1,数字控制器进一步被配置为接收电动液压伺服阀线轴位置信号,并且数字位置信号进一步基于该电动液压伺服阀线轴位置信号。
8.在第三方面中,根据方面2,电动液压伺服阀线轴位置信号基于电动液压伺服阀的线轴的线性位置。
9.在第四方面中,根据方面2或3,电动液压伺服阀线轴位置信号是线性可变差分变压器信号。
10.在第五方面中,根据方面1-4中任一项,数字控制器进一步被配置为接收输出位置信号,并且数字位置信号进一步基于该输出位置信号。
11.在第六方面中,根据方面5,输出位置信号基于致动器的位置。
12.在第七方面中,根据方面6,致动器是液压旋转活塞致动器。
13.在第八方面中,根据方面5或6,输出位置信号是可变差分变压器信号。
14.在第九方面中,一种位置控制的方法,包括:接收预定设定点,接收差分模拟反馈信号,基于所接收的预定设定点和所接收的差分模拟反馈信号来确定数字位置信号,提供
所确定的数字位置信号,基于数字位置信号来确定差分模拟电动液压伺服阀位置控制信号,以及提供差分模拟电动液压伺服阀位置控制信号。
15.在第十方面中,根据方面9,方法进一步包括接收电动液压伺服阀线轴位置信号,其中数字位置信号进一步基于该电动液压伺服阀线轴位置信号。
16.在第十一方面中,根据方面10,电动液压伺服阀线轴位置信号基于电动液压伺服阀的线轴的线性位置。
17.在第十二方面中,根据方面10或11,电动液压伺服阀线轴位置信号是线性可变差分变压器信号。
18.在第十三方面中,根据方面9-12中任一项,数字控制器进一步被配置为接收输出位置信号,并且数字位置信号进一步基于该输出位置信号。
19.在第十四方面中,根据方面13,输出位置信号基于致动器的位置。
20.在第十五方面中,根据方面14,致动器是液压旋转活塞致动器。
21.在第十六方面中,根据方面14或15,输出位置信号是可变差分变压器信号。
22.在第十七方面中,一种控制系统,包括:控制器,控制器被配置为提供预定设定点并且接收第一差分模拟反馈信号;电动液压伺服阀,电动液压伺服阀被配置为接收差分模拟电动液压伺服阀位置控制信号;以及转换装置,转换装置包括电路系统,电路系统被配置为执行包括如下的操作:接收预定设定点;接收第二差分模拟反馈信号;基于所接收的预定设定点和第二差分模拟反馈信号来确定数字位置信号;基于所确定的数字位置信号来确定差分模拟电动液压伺服阀位置控制信号;基于差分模拟电动液压伺服阀位置控制信号向电动液压伺服阀提供差分模拟反馈信号;基于第二差分模拟反馈信号来确定第一差分模拟反馈信号;以及向控制器提供第一差分模拟反馈信号。
23.在第十八方面中,根据方面17,控制系统进一步包括位置传感器,位置传感器被配置为感测电动液压伺服阀的阀线轴的位置,并提供表示该位置的电动液压伺服阀线轴位置信号,其中控制器进一步被配置为接收电动液压伺服阀线轴位置信号,并且数字位置信号进一步基于电动液压伺服阀线轴位置信号。
24.在第十九方面中,根据方面17或18,控制系统进一步包括液压致动器和位置传感器,液压致动器被配置为由电动液压伺服阀的液压输出致动,并且位置传感器被配置为感测液压致动器的位置并且提供表示该位置的致动器位置信号,其中控制器进一步被配置为接收致动器位置信号,并且数字位置信号进一步基于致动器位置信号。
25.在第二十方面中,根据方面17-19中任一项,转换装置进一步包括放大器,放大器被配置为基于由控制器提供的放大信号来选择性地放大差分模拟电动液压伺服阀位置控制信号。
26.在大体方面中,一种控制器装置包括数字控制器,数字控制器被配置为基于设定点和差分模拟反馈信号来提供数字位置信号;以及转换器电路,转换器电路被配置为基于数字位置信号来提供差分模拟电动液压伺服阀位置控制信号,并且基于差分模拟电动液压伺服阀位置控制信号来提供差分模拟反馈信号。
27.各种实施例可以包括以下特征中的一些、全部或无一。数字控制器可被进一步被配置为接收电动液压伺服阀线轴位置信号,并且数字位置信号可以进一步基于该电动液压伺服阀线轴位置信号。电动液压伺服阀线轴位置信号可以基于电动液压伺服阀的线轴的线
性位置。电动液压伺服阀线轴位置信号可以是线性可变差分变压器信号。数字控制器可被进一步被配置为接收输出位置信号,并且数字位置信号可以进一步基于该输出位置信号。输出位置信号可以基于致动器的位置。致动器可以是液压旋转活塞致动器。输出位置信号可以是可变差分变压器信号。
28.在另一大体方面中,一种位置控制的方法,包括:接收预定设定点,接收差分模拟反馈信号,基于所接收的预定设定点和所接收的差分模拟反馈信号来确定数字位置信号,提供所确定的数字位置信号,基于数字位置信号来确定差分模拟电动液压伺服阀位置控制信号,以及提供差分模拟电动液压伺服阀位置控制信号。
29.各种实现可以包括以下特征中的一些、全部或无一。方法还可以包括接收电动液压伺服阀线轴位置信号,其中数字位置信号进一步基于该电动液压伺服阀线轴位置信号。电动液压伺服阀线轴位置信号可以基于电动液压伺服阀的线轴的线性位置。电动液压伺服阀线轴位置信号可以是线性可变差分变压器信号。方法还可以包括接收输出位置信号,其中数字位置信号进一步基于该输出位置信号。输出位置信号可以基于致动器的位置。致动器可以是液压旋转活塞致动器。输出位置信号可以是可变差分变压器信号。
30.在另一大体方面中,一种控制系统,包括:控制器,控制器被配置为提供预定设定点并且接收第一差分模拟反馈信号;电动液压伺服阀,电动液压伺服阀被配置为接收差分模拟电动液压伺服阀位置控制信号;以及转换装置,转换装置包括电路系统,电路系统被配置为执行包括如下的操作:接收预定设定点;接收第二差分模拟反馈信号;基于所接收的预定设定点和第二差分模拟反馈信号来确定数字位置信号;基于所确定的数字位置信号来确定差分模拟电动液压伺服阀位置控制信号;基于差分模拟电动液压伺服阀位置控制信号向电动液压伺服阀提供差分模拟反馈信号;基于第二差分模拟反馈信号来确定第一差分模拟反馈信号;以及向控制器提供第一差分模拟反馈信号。
31.各种实施例可以包括以下特征中的一些、全部或无一。控制系统还可以包括位置传感器,位置传感器被配置为感测电动液压伺服阀的阀线轴的位置,并提供表示该位置的电动液压伺服阀线轴位置信号,其中控制器进一步被配置为接收电动液压伺服阀线轴位置信号,并且数字位置信号进一步基于电动液压伺服阀线轴位置信号。控制系统还可以包括液压致动器和位置传感器,液压致动器被配置为由电动液压伺服阀的液压输出致动,并且位置传感器被配置为感测液压致动器的位置并且提供表示该位置的致动器位置信号,其中控制器进一步被配置为接收致动器位置信号,并且数字位置信号进一步基于致动器位置信号。转换装置还可以包括放大器,放大器被配置为基于由控制器提供的放大信号来选择性地放大差分模拟电动液压伺服阀位置控制信号。
32.本文所描述的系统和技术可以提供以下优点中的一个或多个。第一,系统可以在恶劣的操作环境中提供位置控制。第二,系统可以以更高的抗电磁干扰度和减少的电磁干扰发射来操作。第三,系统可以对温度变化的影响具有更高的抗扰度。第四,系统可以以更低的功率要求和更高的功率效率来操作。
33.在以下所附附图和描述中阐述一个或多个实施方式的细节。根据说明书和附图以及根据权利要求书,其他特征和优点将显而易见。
附图说明
34.图1是示出了用于液压位置控制的系统的示例的示意图。
35.图2是示出了图1的系统的功率级的示例变体的框图。
36.图3是示出了用于液压位置控制的过程的示例的流程图。
37.图4是通用计算机系统的示例的示意图。
具体实施方式
38.本文档描述了用于电动液压伺服阀的控制系统。在以前的设计中使用以生成和测量模拟信号的模拟设备容易受到温度变化的影响。因此,在一些实现(诸如飞行器应用中)中,这些组件在操作期间受到不同的温度影响,且模拟设备的各种特性(例如增益、误差和相位裕度)可能会改变,从而降低此类模拟控制系统的精度。一些这种以前的设计也要求使用多个功率源来为个体模拟组件供电,以及限定模拟设定值。因此,此类先前的模拟控制系统需要增加的功率,使得飞行器的整体功率效率降低。
39.通常,本文档中描述的控制系统实现了保持在数字域中并使用位置反馈系统的闭环控制,该位置反馈系统能够抵抗温度变化和某些应用(例如飞行器控制)中可能遇到的其他不利操作条件的影响。本文档中描述的控制系统还实现了模拟控制信号,而不是以前一些设计中使用的脉冲宽度调制(pwm)控制信号。通过使用模拟信号代替pwm,可以避免pwm信号可能引起的电磁干扰。
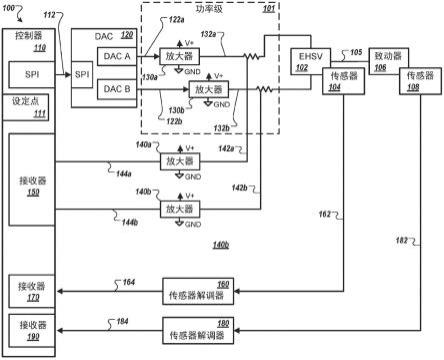
40.图1是示出了用于液压位置控制的系统100的示例的示意图。系统100包括电动液压伺服阀(ehsv)102。ehsv 102被配置为移动到由传感器104感测的多个双极位置。在一些实现中,传感器104可以是分解器。在一些实现中,传感器104可以是可变差动变压器(vdt),诸如旋转vdt或线性vdt。例如,vdt具有很少的或没有可能会遇到温度相关问题的内部接触部件,因此vdt可用于具有广泛操作温度范围的操作环境中,这些操作温度范围可能会损坏、退化或破坏其他类型的位置传感器(例如,在发动机附近)。vdt还具有机械稳定性,其中摩擦接触中很少有或没有运动部件因机械循环和/或振动而磨损。
41.ehsv 102通过一条或多条液压管路105控制至致动器106(例如,线性液压活塞致动器、液压旋转活塞致动器)的液压流体流。致动器106被配置为驱动物理或机械负载(例如,飞行器飞行控制表面、阀)的位置。致动器106的位置由传感器108感测。在一些实现中,传感器108可以是vdt或分解器。
42.控制器110(例如,数字控制器、处理器、现场可编程门阵列)被配置为向数模转换器(dac)120提供数字控制信号112。数字控制信号112表示ehsv 102和/或致动器106的目标(例如,期望的)配置或位置。dac 120将数字控制信号112转换为包括模拟控制信号122a和模拟控制信号122b的差分模拟控制信号。在一些实施例中,数字控制信号112可以作为串行外围接口(spi)信号传送和接收(例如,控制器110和dac 120可通过spi端口彼此通信)。数字控制信号112部分基于所接收的(例如,用户提供的或自动提供的)或所确定的(例如,经校准的、所计算的)设定点111、以及将在后续段落中描述的一个或多个反馈信号。
43.系统100包括功率级101,功率级101包括放大器130a和放大器130b。模拟控制信号122a被放大器130a放大以提供经放大的模拟控制信号132a。模拟控制信号122b被放大器130b放大以提供经放大的模拟控制信号132b。经放大的模拟控制信号132a和132b形成经放
大的差分模拟控制信号,所述经放大的差分模拟控制信号被提供以驱动ehsv 102的配置。在一些实施例中,驱动ehsv的电机所需的模拟输出电流为约 /-10ma。在一些实现中,具有经运算放大器缓冲的输出的dac可以提供紧密的、数字控制的差分模拟输出。与pwm方法相比,dac方法本质上噪声较小(例如,emc)。
44.经放大的模拟控制信号132a的部分142a被放大器140a放大以提供经缓冲的模拟控制信号144a。经放大的模拟控制信号132b的部分142b被放大器140b放大以提供经放大的模拟控制信号144a。经放大的模拟控制信号144a和144b形成经放大的差分模拟控制信号,所述经放大的差分模拟控制信号被提供到接收器150。接收器150是模数转换器(adc)。接收器150将由经放大的模拟控制信号144a和144b提供的经放大的差分模拟信号转换为可由控制器110处理的数字信号。在使用中,经放大的模拟控制信号144a和144b提供在可用于确定数字控制信号112的控制回路中使用的反馈。在所示出的示例中,接收器150与控制器110集成,但在一些实施例中,接收器150可以是与控制器110通信的单独模块。
45.传感器104向信号解调器160提供位置信号162,并且信号解调器160基于位置信号162提供经解调的信号164。接收器170被配置为接收位置信号162。在一些实施例中,接收器可被配置为接收模拟和/或数字信号,并以控制器110可以使用的格式转换或以其他方式提供它们。例如,传感器104可以是vdt,而位置信号162可以是vdt的随ehsv 102的位置或配置而变化的模拟差分输出信号。在此类示例中,信号解调器160可以是被配置为将vdt信号转换为可由接收器170接收的数字信号的adc。在另一示例中,传感器104可以是分解器,而位置信号162可以是随ehsv 102的位置或配置而变化的数字信号。在此类示例中,信号解调器160可以是被配置为将数字信号转换为可由接收器170接收的格式的协议转换器。
46.在使用中,经解调的信号164提供在可用于确定数字控制信号112的控制回路中使用的反馈。在所示出的示例中,接收器170与控制器110集成,但在一些实施例中,接收器170可以是与控制器110通信的单独模块。
47.传感器108向信号解调器180提供位置信号182,并且信号解调器180基于位置信号182提供经解调的信号184。接收器190被配置为接收位置信号182。在一些实施例中,接收器190可被配置为接收模拟和/或数字信号,并以控制器110可以使用的格式转换或以其他方式提供它们。例如,传感器108可以是vdt,而位置信号182可以是vdt的随ehsv 102的位置或配置而变化的模拟差分输出信号。在此类示例中,信号解调器180可以是被配置为将vdt信号转换为可由接收器190接收的数字信号的adc。在另一示例中,传感器108可以是分解器,而位置信号182可以是随ehsv 102的位置或配置而变化的数字信号。在此类示例中,信号解调器180可以是被配置为将数字信号转换为可由接收器190接收的格式的协议转换器。
48.在使用中,经解调的信号184提供在可用于确定数字控制信号112的控制回路中使用的反馈。在所示出的示例中,接收器190与控制器110集成,但在一些实施例中,接收器190可以是与控制器110通信的单独模块。在一些实施例中,控制器110可以是fpga或微处理器。例如,fpga和微处理器都非常适合读取来自传感器104和/或传感器108的反馈(例如,vdt或分解器信号)以及驱动数字控制信号。控制器110闭合电流控制回路和位置控制回路,从而允许在范围、ki/kp值和软件施加的限制中进行配置。
49.该方法的优点在于闭环控制可保持在数字域中。数字域中的电流控制允许可配置性,例如,当连接了不同的电机时。功率级可以保持模拟,并且没有pwm切换提供了固有的低
辐射发射的优点。具有差分模拟输出的dac 120允许在低电流域中进行精确控制。经放大的模拟控制信号144a和144b的差分电压允许接收器150内的模拟到数字转换在几乎任何时间(基本上没有时间约束)进行采样来感测电流。
50.系统100可在恶劣的操作环境(例如,会退化、破坏或以其他方式对先前控制系统的寿命和/或性能产生负面影响的环境)中使用。在一些实现中,控制器110可以从系统100的其他组件远程地定位。例如,控制器110可以位于飞行器驾驶舱内或附近,并且致动器106可以位于飞行器机翼或发动机中。在此类示例中,数字控制信号112的数字性质可以允许数字控制信号112从驾驶舱附近传送到致动器106附近,相对地更加不受噪声和/或可能负面地影响模拟控制信号产生的信号退化的影响。在另一示例中,如先前的段落中所述,传感器104和/或传感器106可以是比率度量vdt或分解器,比率度量vdt或分解器是固有无摩擦的稳定绝对位置传感器,具有几乎无限的循环寿命,并且可以在恶劣环境中操作。
51.在一些实现中,ehsv 102可以从dac 120远程地定位。例如,由于模拟控制信号122a和122b以及经放大的模拟控制信号132a和132b是差分模拟信号,因此它们基本上在距离上不受电噪声的影响(例如,与非差分信号不同)。在另一示例中,由于模拟控制信号122a和122b以及经放大的模拟控制信号132a和132b是差分模拟信号,因此这些信号在长互连上可以比其他设计中使用的pwm信号发射少得多的电磁干扰。
52.在一些实现中,致动器106可以从dac 102远程地定位。例如,ehsv 102和致动器106之间的液压管路105提供的流体连接不受电噪声的影响,并且可以承受可能以其他方式损坏电气连接的高温(例如,导线上的熔融绝缘)。
53.在一些实现中,传感器104可从控制器110和/或信号解调器160远程地定位。例如,传感器104可以是vdt,且位置信号162可以是vdt信号。一些类型的vdt信号是随所感测的位置改变而变化的差分模拟信号。差分信号高度不受以其它方式可能会在长传输距离内发生的电噪声和信号衰减的影响。在一些实现中,传感器108可因类似的原因从控制器110和/或信号解调器180远程地定位。
54.在一些实施例中,可以基于特定应用和/或用户需求来替换或修改功率级101。例如,可以基于电流需求来控制放大器130a和130b的功率。在此类示例中,如果电流低,则轨道可以降低,并且如果需要高电流,则轨道可以增加。在另一示例中,可通过将两个放大器并联连接以具有至放大器的更高电源电压来实现更大的输出驱动电流。在此类示例中,第二运算放大器可被更改为差分电压跟随器。跟随器配置可允许单个dac输出以驱动差分电流,从而降低数字控制的复杂性。在另一示例中,放大器配置也可以用h桥拓扑结构代替,以获得更高的功率电流。
55.图2是示出了示例功率级200的框图。在一些实施例中,功率级200可以是图1的系统100的示例功率级101的变体。大体上,功率级200被配置为使得到放大器130a和130b的功率可被控制,并且功率级200包括并联的放大器以驱动经放大的模拟控制信号132a和132b。
56.功率级200包括所图示的视图中的放大器130a和130b以及ehsv102。从dac 120(本视图中未示出)接收模拟控制信号122a和模拟控制信号122b,并且将部分142a和142b提供给放大器140a和140b(本视图未示出)。
57.到放大器130a和130b的功率受功率控制电路210控制。恒定功率由功率源212供应给放大器130a和130b。来自功率源214的附加功率基于(例如,由控制器110提供的)放大控
制信号216被供应给放大器130a和130b。当信号216变高时,开关218a和开关218b允许来自功率源214的附加功率流向放大器130a和130b。当信号216变低时,开关218a和开关218b防止来自功率源214的附加功率流向放大器130a和130b。
58.除了由放大器130a提供的电流外,输出驱动电流还被放大器230a提供给ehsv 102。放大器230a被配置为跟随由放大器130a输出的经放大的模拟控制信号132a,并且与经放大的模拟控制信号132a并行地提供放大器230a的输出,以形成提供给ehsv 102的经放大的模拟控制器信号232a。类似地,放大器230b被配置为跟随由放大器130b输出的经放大的模拟控制信号132b,并且与经放大的模拟控制信号132b并行地提供放大器230b的输出,以形成提供给ehsv 102的经放大的模拟控制器信号232b。经放大的模拟控制信号232a和232b一起形成驱动ehsv 102的操作的差分模拟控制信号。
59.图3是示出了用于液压位置控制的过程300的示例的流程图。例如,可以通过诸如图1的示例系统100之类的系统来执行该过程。为了表示的清楚,下面的描述使用系统100和功率级200作为示例来描述过程。然而,可以使用另一系统或系统的组合来执行这些过程。
60.在310处,接收预定设定点。例如,示例控制器110可以从人工操作员(例如飞行员)或从表示ehsv 102、致动器106或由致动器106致动的机械负载的期望配置的另一电路(例如自动驾驶仪)接收设定点111。
61.在320处,接收差分模拟反馈信号。例如,控制器110接收由经放大的模拟控制信号144a和144b提供的经放大的差分模拟信号。
62.在330处,基于所接收的设定点和所接收的差分模拟反馈信号来确定数字位置信号。例如,控制器110可以基于设定点111和经放大的模拟控制信号144a和144b来确定数字控制信号112。
63.在340处,提供所确定的数字位置信号。例如,可以从控制器110向dac 120提供数字控制信号112。
64.在350处,基于数字位置信号来确定差分模拟电动液压伺服阀位置控制信号。例如,dac 120提供经放大的模拟控制信号132a和132b,信号132a和132b一起形成经放大的差分模拟控制信号。
65.在360处,提供差分模拟电动液压伺服阀位置控制信号。例如,由dac 120提供由经放大的模拟控制信号132a和132b形成的经放大的差分模拟控制信号。
66.在一些实现中,过程300还可以包括接收电动液压伺服阀线轴位置信号,其中数字位置信号进一步基于电动液压伺服阀线轴位置信号。例如,控制器110可以接收基于位置信号162的经解调的信号164,并且控制器110可以基于经解调的信号164确定数字控制信号112。
67.在一些实现中,电动液压伺服阀线轴位置信号可以基于电动液压伺服阀的线轴的线性位置。例如,位置信号162可以由传感器104提供,传感器104被配置为感测ehsv 102的线性位置。在一些实现中,电动液压伺服阀线轴位置信号可以是可变差分变压器信号。例如,传感器104可以是线性vdt或旋转vdt。
68.在一些实现中,过程300还可以包括接收输出位置信号,其中数字位置信号进一步基于输出位置信号。例如,控制器110可以接收基于位置信号182的经解调的信号184,并且控制器110可以基于经解调的信号184确定数字控制信号112。在一些实现中,输出位置信号
可以是可变差分变压器信号。例如,传感器108可以是可提供位置信号182作为vdt信号的线性vdt或旋转vdt。
69.在一些实现中,输出位置信号可以基于致动器的位置。例如,位置信号182由传感器108提供,传感器108被配置为感测致动器106的位置或者由致动器106定位或以其他方式受致动器106控制的负载的位置。在一些实现中,致动器可以是液压旋转活塞致动器(rpa)。例如,致动器106可以是液压rpa。
70.图4是通用计算机系统400的示例的示意图。根据一个实现,系统400可以用于结合过程300描述的操作。例如,系统400可被包括作为图1的示例控制器110的部分或全部。
71.系统400包括处理器410、存储器420、存储设备430和输入/输出设备440。组件410、420、430和440中的每一个都使用系统总线450互连。处理器410能够处理用于在系统400内执行的指令。在一个实现中,处理器410是单线程处理器。在另一个实现中,处理器410是多线程处理器。处理器410能够处理存储在存储器420中或存储设备430上的指令,以在输入/输出设备440上显示用户界面的图形信息。
72.存储器420存储系统400内的信息。在一个实现中,存储设备420是计算机可读介质。在一个实现中,存储器420是易失性存储器单元。在另一个实现中,存储器420是非易失性存储器单元。
73.存储设备430能够为系统400提供大容量存储。在一个实现中,存储设备430是计算机可读介质。在各种不同的实现中,存储设备430可以是软盘设备、硬盘设备、光盘设备或磁带设备。
74.输入/输出设备440为系统400提供输入/输出操作。在一个实现中,输入/输出设备440包括键盘和/或定点设备。在另一个实现中,输入/输出设备440包括用于显示图形用户界面的显示单元。
75.所描述的特征可以在数字电子电路、或在计算机硬件、固件、软件或以它们的组合中实现。该装置可以在有形地体现在信息载体中的计算机程序产品中实现,例如,在用于由可编程处理器执行的机器可读存储设备中;以及方法步骤可以由执行指令程序的可编程处理器执行,以通过对输入数据进行操作并生成输出来执行所描述的实现的功能。所描述的特征可以有利地在一个或多个计算机程序中实施,该一个或多个计算机程序在可编程系统上是可执行的,该可编程系统包括至少一个可编程处理器,该至少一个可编程处理器被耦合用于从数据存储系统、至少一个输入设备和至少一个输出设备接收数据和指令并且向其传输数据和指令。计算机程序是可以在计算机中直接或间接地使用以执行一定活动或带来一定结果的指令集。计算机程序可以以包括编译或解释语言的任何形式的编程语言来编写,并且其可以以包括作为独立程序或者作为模块、部件、子例程或适于在评估环境中使用的其他单元的任何形式来部署。
76.用于执行指令的程序的合适处理器包括:例如通用微处理器和专用微处理器两者、以及任何种类的数字计算机的唯一处理器或多个处理器之一。一般而言,处理器将从只读存储器或随机存取存储器或两者接收指令和数据。计算机的基本元件是用于执行指令的处理器、以及用于存储指令和数据的一个或多个存储器。一般而言,计算机还将包括用于存储数据文件的一个或多个大容量存储设备,或与该大容量存储设备可操作地耦合以与该大容量存储设备通信;此类设备包括:磁盘,诸如内部硬盘和可移动盘;磁光盘;以及光盘。适
于有形地体现计算机程序指令和数据的存储设备包括所有形式的非易失性存储器,作为示例该非易失性存储器包括:半导体存储器设备,诸如eprom、eeprom和闪存设备;磁盘,诸如内部硬盘和可移动盘;磁光盘;以及cd-rom和dvd-rom盘。处理器和存储器可以由asic(专用集成电路)和/或现场可编程门阵列(fpga)补充,或被并入asic(专用集成电路)和/或现场可编程门阵列(fpga)。
77.为了提供与用户的交互,这些特征可以在具有用于向用户显示信息的显示设备(诸如crt(阴极射线管)或lcd(液晶显示器)监视器)、以及用户可以通过其向计算机提供输入的键盘和定点设备(诸如鼠标或轨迹球)的计算机上实现。用户交互可以是基于命令行的,或者通过使用寄存器读取和写入来将信息输入和/或输出系统。
78.这些特征可以在包括后端组件(诸如数据服务器)的计算机系统中实现、或者在包括中间件组件(诸如应用服务器或互联网服务器)的计算机系统中实现、或者在包括前端组件(诸如具有图形用户界面或互联网浏览器的客户端计算机)的计算机系统中实现、或者在它们的任意组合中实现。系统的组件可由任何形式或介质的数字数据通信(诸如通信网络)连接。通信网络的示例包括,例如,lan、wan和形成互联网的计算机和网络。
79.计算系统可以包括客户端和服务器。客户端和服务器通常彼此远离,并且通常通过网络(诸如所描述的网络)交互。客户端和服务器的关系根据在各自计算机上运行且彼此具有客户端-服务器关系的计算机程序来产生。
80.尽管在上文中已经详细描述了几个实施例,但其他的修改是可能的。此外,在附图中描绘的逻辑流程不需要所示出的特定顺序或相继顺序来实现期望的结果。此外,其他步骤可以被提供,或者步骤可以被从所描述的流程中被消除,并且其他部件可以被添加到所描述的系统或从所描述的系统中被移除。相应地,其他实现方式也在所附权利要求的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。