1.本发明涉及一种诊断装置。
背景技术:
2.作为诊断机床、机器人等工业机械的状态的方法,已知针对每个工业机械生成用于预定诊断的模型,使用生成的模型基于从工业机械取得的数据来进行诊断的方法(例如,专利文献1等)。通过该方法诊断工业机械的状态的诊断装置基于在工业机械正常动作时取得的数据来构建用于诊断状态的模型,并使用所构建的模型来诊断工业机械的状态。即使在工业机械存在个体差异的情况下,也能够使用从该工业机械取得的数据来构建模型,因此能够维持状态的诊断精度。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2017-033526号公报
技术实现要素:
6.发明要解决的课题
7.在工厂当工业机械运转时,例如由于发生部件的磨损、缺损等而取得偏离了正常状态的数据时,诊断装置诊断为工业机械的状态为异常。在诊断为工业机械的状态为异常时,操作者停止该工业机械的运转,进行维护作业。在维护作业中,进行各部的调整或部件的更换。在维护作业后,操作员使工业机械重新运转。
8.重新运转后的工业机械再次由诊断装置诊断其状态。然而,由于进行维护而更换后的部件存在个体差异等原因,若直接使用以前所使用的模型来继续进行诊断,则存在工业机械的状态的诊断精度降低的情况。在这样的情况下,为了维持状态的诊断精度,需要进行模型的重新学习、追加学习、模型的参数调整、模型切换等这样的诊断模型的适应处理。然而,一般工业机械本身不具有明确地对更换了部件的定时进行检测的功能。因此,操作员在通过维护等进行了部件更换等的情况下,需要自己判断诊断模型适应的必要性,通过手动作业将诊断模型的适应指令输入到诊断装置。这样的作业对于操作员来说成为负担,特别是需要频繁更换部件的工业机械的诊断模型的适应指令成为很大的负担。
9.因此,需要一种在进行了部件更换等维护作业时,即使不明确地指令也会根据需要进行模型的适应处理的技术。
10.用于解决课题的手段
11.本发明的诊断装置使用成为诊断对象的机械的运转信息、设定信息、诊断结果的值中的任意一个来判断模型的适应处理的定时,进行用于促使用户判断是否执行模型的适应处理的显示,或者自动执行模型的适应处理,由此来解决上述课题。
12.并且,本发明的一个方式是一种诊断工业机械的状态的诊断装置,其具备:模型存储部,其存储用于诊断所述工业机械的状态的模型;数据取得部,其取得与所述工业机械的
状态相关的数据;状态判定部,其基于所述数据取得部取得的数据,使用存储在所述模型存储部的模型来判定所述工业机械的状态;部件更换检测部,其基于所述数据取得部取得的数据、与所述状态判定部判定出的所述工业机械的状态相关的数据,检测更换了所述工业机械的部件的情况;以及模型适应执行部,在检测到更换了所述工业机械的部件时,使存储在所述模型存储部的模型适应更换部件后的所述工业机械的状态的诊断。
13.发明效果
14.根据本发明的一个方式,能够通知或者自动地决定模型的适应处理的执行定时,能够降低操作员的负担。
附图说明
15.图1是一个实施方式的诊断装置的概略硬件结构图。
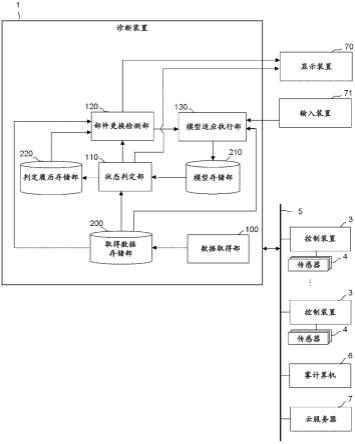
16.图2是第一实施方式的诊断装置的概略功能框图。
具体实施方式
17.以下,结合附图对本发明的实施方式进行说明。
18.图1是表示本发明的一个实施方式的诊断装置的主要部分的概略硬件结构图。例如,能够作为控制工业机械的控制装置来安装本发明的诊断装置1,另外,本发明的诊断装置1能够安装在与控制工业机械的控制装置并列设置的个人计算机、经由有线/无线的网络与控制装置连接的个人计算机、雾计算机、云服务器上。在本实施方式中,将诊断装置1安装在经由网络与控制工业机械的控制装置连接的个人计算机上。
19.本实施方式的诊断装置1所具备的cpu11是整体控制诊断装置1的处理器。cpu11经由总线22读出存储在rom12中的系统程序,根据该系统程序来控制整个诊断装置1。在ram13中暂时存储临时的计算数据、显示数据以及从外部输入的各种数据等。
20.非易失性存储器14例如由使用未图示的电池进行备份的存储器或ssd(solid state drive:固态驱动器)等构成,即使诊断装置1的电源被断开,也保持存储状态。在非易失性存储器14中存储经由接口15从外部设备72读入的数据和控制用程序、经由输入装置71输入的数据和控制用程序、从控制配备有传感器4的工业机械的控制装置3、雾计算机6、云服务器7等其他计算机取得的各数据等。在这样的数据中,例如包含从为了检测工业机械的动作状态而设置的负载检测器、电流/电压计、声音检测器、光检测器等传感器4取得的数据等。在非易失性存储器14中存储的数据、控制用程序在执行时/使用时可以在ram13中展开。另外,在rom12中预先写入了公知的分析程序等各种系统程序。
21.接口15是用于将诊断装置1的cpu11与usb装置等外部设备72连接的接口。能够从外部设备72侧读入例如在工业机械的控制中使用的控制用程序、各参数等。另外,在诊断装置1内编辑后的控制用程序、各参数等能够经由外部设备72存储在外部存储单元,或者经由网络5向控制装置3、其他计算机发送。
22.经由接口18向显示装置70输出在存储器上读入的各数据、作为执行控制用程序或系统程序等的结果而得到的数据等,来进行显示。另外,由键盘、指示设备等构成的输入装置71经由接口19将基于作业者操作的指令、数据等交给cpu11。
23.接口20是用于将诊断装置1的cpu与有线或无线的网络5连接的接口。在网络5上连
接有控制工业机械的控制装置3、雾计算机6、云服务器7等,与诊断装置1之间相互进行数据的交换。
24.图2将本发明的第一实施方式的诊断装置1所具备的功能表示为概略性的框图。本实施方式的诊断装置1所具备的各功能通过由图1所示的诊断装置1所具备的cpu11执行系统程序,控制诊断装置1的各部的动作来实现。
25.本实施方式的诊断装置1具备数据取得部100、状态判定部110、部件更换检测部120、模型适应执行部130。另外,在诊断装置1的ram13或非易失性存储器14中预先准备了存储从控制工业机械的控制装置3取得的数据的取得数据存储部200、预先存储了用于诊断的模型的模型存储部210、用于对状态判定部110的工业机械的状态判定结果的履历进行存储的判定履历存储部220。
26.数据取得部100通过由图1所示的诊断装置1所具备的cpu11执行从rom12读出的系统程序,主要由cpu11使用ram13、非易失性存储器14执行运算处理以及使用接口20执行通信处理来实现。数据取得部100从控制工业机械的控制装置3取得表示该工业机械的动作状态的数据。数据取得部100所取得的数据可以是在工业机械或控制装置中设定的各种补偿值或时间常数等机械设定信息。数据取得部100所取得的数据可以是表示工业机械的运转/停止的信息、工业机械的驱动部的位置、速度、加速度、工业机械的驱动部的电流/电压值、驱动部的负荷、各部的温度、工业机械周边的声音、对工业机械的动作范围进行拍摄而得到的图像等机械运转信息。数据取得部100所取得的数据可以是能够从工业机械直接取得的数据,也可以是由工业机械或安装在工业机械周边的传感器4检测出的数据。数据取得部100所取得的数据既可以是在预定时刻取得的数据,也可以是以预定周期取得的时间序列数据。将数据取得部100所取得的数据与检测出的时刻、工业机械的标识符等相关联地存储于取得数据存储部200。
27.状态判定部110通过由图1所示的诊断装置1所具备的cpu11执行从rom12读出的系统程序,主要由cpu11使用ram13、非易失性存储器14执行运算处理来实现。状态判定部110基于数据取得部100所取得的数据,执行使用了模型存储部210中存储的诊断用模型的工业机械的状态判定处理。在模型存储部210中预先存储有基于工业机械的数据而构建的诊断用模型。诊断用模型可以是通过所谓无监督学习而构建的模型,例如可以是在工业机械正常动作时取得的数据集合的簇。在该情况下,状态判定部110能够基于从工业机械取得的机械运转信息的矢量值相对于正常动作时取得的数据集合的簇中心偏离了多少(距离)等,诊断工业机械的状态处于正常范围内还是进行了异常的动作。
28.诊断用模型可以是通过所谓的监督学习而构建的模型,例如可以是诊断工业机械的正常/异常的神经网络或回归式。在该情况下,状态判定部110能够将从工业机械取得的机械运转信息输入到模型,基于输出的值(得分值),诊断工业机械的状态处于正常的范围内还是进行了异常的动作。将状态判定部110的判定结果向显示装置70输出。在状态判定部110判定为异常的情况下,可以在显示装置70显示该意思,并且通过光或声音等向操作员发出警告。另外,也可以根据需要对判定为处于异常状态的工业机械(控制工业机械的控制装置3)输出使该工业机械的动作停止的指令。将状态判定部110得出的工业机械的状态判定结果还输出到部件更换检测部120,并且作为判定履历信息存储在判定履历存储部220中。此时,状态判定部110可以将在工业机械的状态判定中使用的预定的计算值(在上述例子
中,在诊断中使用的距簇中心的距离、得分值等)也一并作为判定履历信息进行存储。
29.部件更换检测部120通过由图1所示的诊断装置1所具备的cpu11执行从rom12读出的系统程序,主要由cpu11使用ram13、非易失性存储器14执行运算处理来实现。部件更换检测部120基于从控制工业机械的控制装置3取得的机械设定信息和机械运转信息、状态判定部110得到的工业机械的状态的判定履历信息,检测更换了该工业机械的部件的情况。部件更换检测部120例如在根据机械设定信息将工具补偿值向负方向进行了预先决定的预定阈值以上的变更时,可以检测为进行了工具更换。部件更换检测部120例如在工业机械产生了警报之后动作停止,在经过了预先决定的预定时间后重新运转的情况下,可以检测为进行了某些部件的更换。部件更换检测部120例如在状态判定部110得到的工业机械的状态的判定结果与在判定履历存储部220中存储的判定履历信息相比,向正常方向好转了预定阈值以上时,可以检测为进行了某些部件的更换。除此之外,部件更换检测部120也可以根据工业机械的特性,使用机械设定信息、机械运转信息、状态判定部110得到的判定结果中的至少任意一个来检测工业机械的部件更换。例如,可以根据机械设定信息、机械运转信息、判定履历信息中的至少任意一个或者其组合中的预定时间序列的变化来检测部件的更换。部件更换检测部120在检测到工业机械的部件更换时,可以在显示装置70显示该意思。另外,部件更换检测部120在检测到工业机械的部件更换时,可以将该意思输出到模型适应执行部130。
30.模型适应执行部130通过由图1所示的诊断装置1所具备的cpu11执行从rom12读出的系统程序,主要由cpu11使用ram13、非易失性存储器14执行运算处理来实现。模型适应执行部130在检测到工业机械的部件更换时,执行使模型存储部210中存储的模型适应更换部件后的工业机械的状态诊断的处理。模型适应执行部130例如可以使用从部件更换后的工业机械取得的数据来重新进行学习处理,使诊断用模型适应更换部件后的工业机械。模型适应执行部130例如可以使用从更换部件后的工业机械取得的数据进行追加学习处理,由此使诊断用模型适应更换部件后的工业机械。模型适应执行部130例如也可以对诊断用模型的参数(例如,簇的中心位置、簇的扩展、模型由式子表示时的式子中的系数、由神经网络表示时的加权系数等)进行调整,以适应从更换部件后的工业机械取得的数据,由此使诊断用模型适应更换部件后的工业机械。模型适应执行部130例如也可以将用于诊断的模型切换为适应于从更换部件后的工业机械取得的数据的其他诊断用模型,由此使诊断用模型适应更换部件后的工业机械。
31.具备上述结构的本实施方式的诊断装置1在检测到在工业机械中更换了部件时,自动进行使工业机械的状态诊断中使用的模型适应从更换部件后的工业机械取得的数据的处理。因此,操作员不需要自己判断并执行模型的适应处理,从而能够降低操作员的负担。
32.作为本实施方式的诊断装置1的一变形例,部件更换检测部120可以在检测到更换了工业机械的部件时,在显示装置70进行用于确定是否执行模型适应处理的显示。部件更换检测部120在检测到更换了工业机械的部件时,例如显示“在yyyy/mm/ddhh:mm是否更换了部件a?在已更换的情况下,请执行模型的适应处理(是/否)”等,在操作者对此选择了“是”的情况下,模型适应执行部130执行模型的适应处理。也存在部件更换检测部120进行的部件更换的检测不准确的情况,因此,通过将最终判断交给用户,能够防止不需要的模型
的适应处理。
33.以上,对本发明的一实施方式进行了说明,但本发明并不仅限于上述实施方式的例子,通过施加适当的变更,能够以各种方式实施。
34.附图标记的说明
35.1 诊断装置
36.3 控制装置
37.4 传感器
38.5 网络
39.6 雾计算机
40.7 云服务器
41.11 cpu
42.12 rom
43.13 ram
44.14 非易失性存储器
45.15,18,19,20 接口
46.22 总线
47.70 显示装置
48.71 输入装置
49.72 外部设备
50.100 数据取得部
51.110 状态判定部
52.120 部件更换检测部
53.130 模型适应执行部
54.200 取得数据存储部
55.210 模型存储部
56.220 判定履历存储部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。