技术特征:
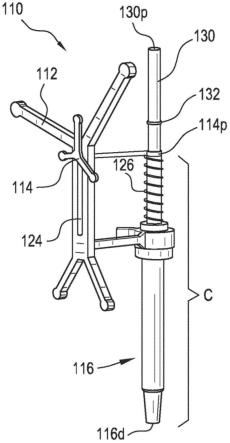
1.一种外科组件,包括:第一阵列,所述第一阵列联接到外科机器人臂并且被构造成定位所述臂的远侧部分的位置;器械安装件,所述器械安装件联接到所述机器人臂,所述器械安装件具有近侧端部、远侧端部以及在所述近侧端部与所述远侧端部之间延伸的内腔;和第二阵列,所述第二阵列被构造成在器械穿过所述器械安装件的所述内腔时相对于所述器械安装件和所述第一阵列移动;其中所述第二阵列被构造成沿着由所述第一阵列限定的路径移动。2.根据权利要求1所述的组件,其中,被构造成定位所述臂的所述远侧部分的所述位置的所述第一阵列被构造成定位所述器械安装件的纵向轴线的位置。3.根据权利要求1或2中任一项所述的组件,其中,所述第二阵列被构造成沿着形成在所述第一阵列中的狭槽行进。4.根据权利要求3所述的组件,其中,所述第二阵列被构造成沿着所述器械安装件的纵向轴线平移。5.根据任一前述权利要求所述的组件,其中,所述第一阵列相对于所述机器人臂的远侧部分静止,并且所述第二阵列被构造成随着接纳在所述器械安装件的所述内腔内的器械的纵向移动而相对于所述第一阵列和所述器械安装件纵向移动。6.根据任一前述权利要求所述的组件,其中,所述第二阵列包括阵列支架、延伸部和管状主体,所述管状主体具有近侧端部、远侧端部以及在所述近侧端部与所述远侧端部之间延伸的内腔,其中所述内腔被构造成接纳穿过所述内腔的器械。7.根据权利要求6所述的组件,其中,所述第二阵列的所述内腔与所述器械安装件的所述内腔同轴。8.根据任一前述权利要求所述的组件,还包括偏置元件,所述偏置元件被构造成相对于所述器械安装件向近侧推动所述第二阵列。9.根据权利要求8所述的组件,其中,所述偏置元件设置在所述器械安装件的内部内腔内。10.根据权利要求8或9中任一项所述的组件,其中,所述偏置元件设置在所述器械安装件的近侧。11.根据任一前述权利要求所述的组件,其中,所述第二阵列包括多个跟踪元件。12.根据权利要求11所述的组件,其中,所述第一阵列包括比所述第二阵列更多数量的跟踪元件。13.一种外科机器人系统,包括:器械安装件,所述器械安装件联接到外科机器人臂,所述器械安装件具有近侧端部、远侧端部以及在所述近侧端部与所述远侧端部之间延伸的内腔;器械,所述器械具有器械主体和形成在所述器械主体上位于所述器械的远侧末端的近侧的位置处的套环;第一阵列部件,所述第一阵列部件被构造成定位所述外科机器人臂的远侧部分的位置;和第二阵列部件,所述第二阵列部件具有接纳在所述器械安装件的所述内腔内的管状主
体,其中所述第二阵列部件被构造成当所述器械的所述套环接触所述第二阵列部件的近侧部分时与所述器械一起向远侧推进。14.根据权利要求13所述的系统,还包括弹簧,所述弹簧在所述第二阵列部件与所述器械安装件之间延伸,使得所述弹簧随着所述第二阵列部件的纵向移动而压缩和膨胀。15.根据权利要求14所述的系统,其中,所述弹簧被偏置远离所述器械安装件。16.根据权利要求13至15中任一项所述的系统,其中,所述器械是钻、抽头、针、触针和探针中的任一者。17.根据权利要求13至16中任一项所述的系统,其中,所述第二阵列部件的近侧端部与所述器械安装件的远侧端部之间的距离基本上等于形成在所述器械主体上的所述套环与所述器械的所述远侧末端之间的距离。18.一种外科方法,包括:定位用于插入到导航器械引导件中的器械,所述导航器械引导件具有主阵列、安装阵列和器械安装件;将所述器械插入到所述导航器械引导件中,使得所述器械延伸穿过所述安装阵列的内腔和所述器械安装件的内腔;通过所述导航器械引导件向远侧移动所述器械,使得所述器械接触所述安装阵列并且使所述安装阵列沿着由所述主阵列限定的路径向远侧移动;以及基于所述安装阵列的位置来跟踪所述器械的远侧末端。19.根据权利要求18所述的方法,其中,所述器械安装件远离患者的身体一定距离。20.根据权利要求18或19中任一项所述的方法,其中,跟踪所述器械的所述远侧末端基于所述安装阵列的所述位置以及形成在所述器械上的套环与所述器械的远侧末端之间的固定距离。21.根据权利要求18至20中任一项所述的方法,其中,在所述器械被向远侧推进通过所述器械安装件时,所述安装阵列相对于所述主阵列和所述器械安装件向远侧移动。22.根据权利要求18至21中任一项所述的方法,其中,所述器械包括形成在所述器械上的套环,所述套环接触所述安装阵列并且在所述器械被向远侧推进通过所述器械安装件时向远侧拖曳所述安装阵列。
技术总结
本发明提供了导航器械引导系统和相关方法,该导航器械引导系统和相关方法可识别接纳在机器人臂的器械安装件内的器械的绝对位置。引导系统的导航阵列单元可包括主阵列和安装阵列。主阵列可识别机器人臂和器械安装件的位置,而安装阵列可识别接纳在器械安装件内的器械的远侧端部的深度位置。当器械被插入到器械安装件中时,器械可穿过安装阵列的内腔。安装阵列可被构造成随着器械的远侧平移而相对于器械安装件和主阵列平移。以此方式,安装阵列的位置可识别器械的深度位置,而无需在安装阵列与器械之间进行机械连接。列与器械之间进行机械连接。列与器械之间进行机械连接。
技术研发人员:J
受保护的技术使用者:美多斯国际有限公司
技术研发日:2021.02.05
技术公布日:2022/9/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。