机械步进器
背景技术:
1.在资源回收产业中,生产包括流体从地层流动到管状件中以运输到表面位置。然而,存在能够控制流动通过管状件的流体的量并且因此调控流体到管状件的流动的需求。
技术实现要素:
2.本文公开了一种递增地致动装置的方法。将插入件放置在壳体内,该壳体具有腔室和位于该腔室内的步进套筒,该步进套筒包括具有由第一平衡直径限定的平衡位置的第一止动构件和具有由小于第一平衡直径的第二平衡直径限定的平衡位置的第二止动构件。插入件包括第一突起。移动插入件穿过壳体。插入件穿过壳体的运动通过改变第一止动构件的直径和第二止动构件的直径经由第一突起递增地限制。
3.本文还公开了一种机械步进器。该机械步进器包括壳体,该壳体在内径表面上具有腔室;步进套筒,该步进套筒位于腔室内,该步进套筒包括具有由第一平衡直径限定的平衡位置的第一止动构件和具有由小于第一平衡直径的第二平衡直径限定的平衡位置的第二止动构件;和插入件,该插入件位于壳体内并且能够相对于壳体移动,该插入件包括突起。插入件经由插入件上的突起与第一止动构件和第二止动构件之间的相互作用递增地移动穿过壳体。
4.本文还公开了一种机械步进器。该机械步进器包括壳体,该壳体在内径表面上具有突起;插入件,该插入件位于壳体内并且能够相对于壳体移动,该插入件包括位于其外表面上的腔室;和步进套筒,该步进套筒位于腔室内,该步进套筒包括具有由第一平衡直径限定的平衡位置的第一止动构件和具有由大于第一平衡直径的第二平衡直径限定的平衡位置的第二止动构件。插入件经由壳体上的突起与第一止动构件和第二止动构件之间的相互作用递增地移动穿过壳体。
附图说明
5.以下描述不应被认为以任何方式进行限制。参考附图,相同元件以相同附图标记表示:
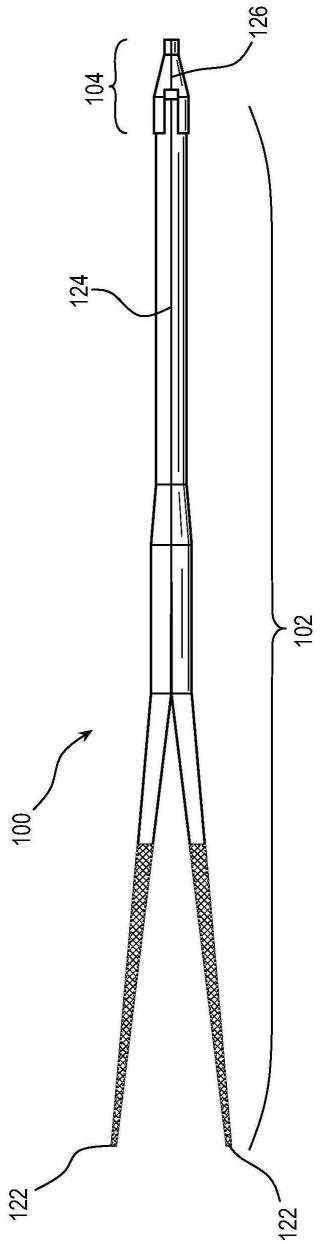
6.图1示出了一个实施方案中的机械步进器;
7.图2示出了机械步进器的壳体的横截面的侧视图;
8.图3示出了机械步进器的插入件;
9.图4示出了机械步进器的步进套筒的横剖视图;
10.图5示出了载体的特写,描绘了第一止动构件和第二止动构件的细节;
11.图6示出了壳体内的插入件的第一步骤以产生步进运动;
12.图7示出了用于产生步进运动的第二步骤;
13.图8示出了用于产生步进运动的第三步骤;
14.图9示出了用于产生步进运动的第四步骤;
15.图10示出了用于产生步进运动的第五步骤;
16.图11示出了用于产生步进运动的第六动作;
17.图12示出了用于产生步进运动的第七动作;
18.图13示出了机械步进器的插入件,其中该插入件的突起位于步进套筒的左侧;
19.图14示出了用于使载体旋转脱离与插入件的对准的运动;
20.图15示出了相对于步进套筒处于自由轴向运动的插入件;
21.图16示出了在图15的运动之后已经移动到步进套筒的右侧的插入件;
22.图17示出了用于使插入件旋转成与载体对准以产生步进运动的运动;
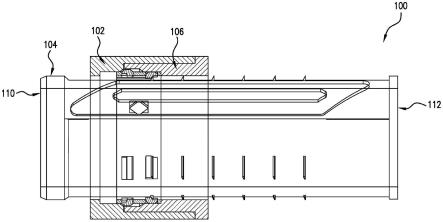
23.图18示出了机械步进器的操作,以便控制流体通过壳体的流动;并且
24.图19示出了另一实施方案中的机械步进器。
具体实施方式
25.本文所公开的设备和方法的一个或多个实施方案的详细描述以参照附图举例而非限制的方式呈现。
26.参考图1,在一个实施方案中示出了一种机械步进器100。机械步进器100包括壳体102、能够移动穿过壳体102的插入件104和驻留在壳体102内的步进套筒106。步进套筒106围绕插入件104的区段周向地延伸,并且能够沿插入件104的外表面滑动。机械步进器100在第一端110和与第一端110相对的第二端112之间纵向延伸,如图1中所示。
27.术语“左”和“右”在本文中用于描述各种元件的相对位置和/或取向以及这些元件的运动的相对方向,如图中所示。应当理解的是,术语“左”和“右”仅旨在用于易于解释,并且不意味着对本发明的限制。第一元件位于第二元件的左侧表明第一元件比第二元件更靠近第一端110。类似地,第一元件位于第二元件的右侧表明第一元件比第二元件更靠近第二端112。另外,向左侧移动的元件是从第二端移动到第一端,并且向右侧移动的元件是指从第一端移动到第二端。
28.图2示出了机械步进器100的壳体102的横截面的侧视图。壳体102是具有穿过其中的纵向孔的构件。壳体102包括第一壳体区段202和第二壳体区段204,该第一壳体区段和该第二壳体区段在组合时形成位于壳体102的内径表面205上的腔室206。在另选实施方案中,壳体102可以是具有腔室206的单个部件。腔室206从第一端壁208延伸到第二端壁210。腔室206包括第一受限区212、第二受限区214和轴向地位于第一受限区212和第二受限区214之间的扩展区216。第一受限区212位于扩展区216的左侧并且具有第一受限外表面220,该第一受限外表面通过径向深度“h”与壳体102的内径表面205径向分离。第二受限区214位于扩展区216的右侧并且具有第二受限外表面222,该第二受限外表面通过径向深度“h”与壳体102的内径表面205径向分离。扩展区216具有扩展外表面224,该扩展外表面通过径向深度“h”与壳体102的内径表面205径向分离,其中h》h。尽管第一受限区212和第二受限区214的径向深度均小于扩展区216的径向深度,在各种实施方案中,第一受限区212的径向深度可以不同于第二受限区214的径向深度。第一倾斜表面226将扩展外表面224连接到第一受限外表面220。类似地,第二倾斜表面228将扩展外表面224连接到第二受限外表面222。尽管以横截面示出,但是应当理解,腔室206围绕壳体102的内侧周向地延伸。
29.图3示出了机械步进器100的插入件104。在一个实施方案中,插入件104包括从第一端110延伸到第二端112并且限定穿过其中的孔的主体302。插入件104包括一组或多组突
起。在图3的例示性实施方案中,插入件示出了第一突起组304、第二突起组310和第三突起组312。每个突起组位于插入件104的外表面上的选定方位位置处。每个凸起组还包括多个凸起306a、306b、
…
、306n,该凸起通过选定的凸起间隔308在纵向方向上彼此轴向分离。每个突起306a、306b、
…
、306n具有选定的圆周长度,以仅覆盖插入件104的圆周的一部分。每个突起306a、306b、
…
、306n具有面向第一端110的非垂直成角表面和与面向第二端112的插入件104的外表面成角度的表面。在各种实施方案中,角度可以垂直于加或减15度。
30.插入件104进一步包括形成在其外表面中的槽状轨道320。槽状轨道320包括第一轴向狭槽322和从第一轴向狭槽周向地移位的第二轴向狭槽324。第一成角横向狭槽326在槽状轨道320的一个轴向端处将第一轴向狭槽322连接到第二轴向狭槽324。第二成角横向狭槽328在槽状轨道320的相对轴向端处将第一轴向狭槽322连接到第二轴向狭槽324。
31.图4示出了机械步进器100的步进套筒106的横剖视图400。横剖视图400示出了步进套筒106的内部表面。步进套筒106包括载体402、第一止动构件404和第二止动构件406。在各种实施方案中,第一止动构件404是第一c形环,并且第二止动构件406是第二c形环。第一c形环和第二c形环部分地围绕载体402的圆周延伸。当处于其中没有施加力的自然状态时,第一止动构件404具有第一平衡直径。当处于其中没有施加力的自然状态时,第二止动构件406具有第二平衡直径。换句话说,第一止动构件404的平衡位置由具有第一平衡直径的第一止动构件404限定,并且第二止动构件406的平衡位置由具有第二平衡直径的第二止动构件406限定。第一平衡直径大于第二平衡直径。第一止动构件404和第二止动构件406各自为柔性的,以便能够径向地扩展或收缩。
32.第一止动构件404和第二止动构件406各自可以独立地或单独地在扩展状态和塌缩状态之间移动。对于第一止动构件404,扩展状态为当第一止动构件404位于其平衡位置处(即,处于第一平衡直径)时的状态。在塌缩状态下,第一止动构件404具有小于第一平衡直径的直径。在非限制性实施方案中,处于塌缩状态的第一止动构件404的直径是第二平衡直径。
33.对于第二止动构件406,塌缩状态为当第二止动构件406位于其平衡位置处(即,处于第二平衡直径)时的状态。在扩展状态下,第二止动构件406具有大于第二平衡直径的直径。在非限制性实施方案中,处于扩展状态的第二止动构件406的直径是第一平衡直径。
34.在各种实施方案中,在扩展状态下,止动构件位于远离载体402的径向向外位置处,并且在塌缩状态下,止动构件的外表面与载体402的外表面齐平或低于载体的外表面。
35.第一止动构件404驻留在载体402的第一轴向位置408处。载体402可以包括位于第一轴向位置408处的第一周向轨道以引导或容纳第一止动构件404。类似地,第二止动构件406驻留在载体402的第二轴向位置410处,并且载体402可以包括位于第二轴向位置410处的第二周向轨道以引导或容纳第二止动构件406。第一轴向位置408更靠近第一端110,并且第二轴向位置410更靠近第二端112。
36.载体402进一步包括周向间隔开的孔组。图3的例示性载体402示出了第一孔组418、第二孔组420和第三孔组422。每个孔组包括彼此轴向分离的第一孔412和第二孔414。为了便于解释,相对于第一孔组418进一步讨论这些孔。
37.第一孔组418包括位于第一轴向位置408处的第一孔412和位于第二轴向位置410处的第二孔414。第一孔412可保持第一止动构件404的至少一部分,并且第二孔414可保持
第二止动构件406的至少一部分。第一孔412和第二孔414通过具有选定的轴向长度的轨道内区域416隔开。
38.载体402进一步包括位于其内径表面上的耳状物430,该耳状物从内径表面径向向内延伸。耳状物430与插入件104的槽状轨道320相互作用,以相对于插入件104旋转步进套筒106,如以下关于图13至图18进一步详细讨论的。
39.图5示出了载体402的特写,描绘了在一个实施方案中第一止动构件404和第二止动构件406的细节。如图5中所示,第一止动构件404位于第二止动构件406的左侧。
40.第一止动构件404包括止动部分502和内凸缘504。止动部分502包括外止动表面506。左倾斜表面508位于外止动表面506的左侧,并且右倾斜表面510位于外止动表面506的右侧。左倾斜表面508成一定角度,该角度与壳体102的第一倾斜表面226的角度相匹配。内凸缘504从止动部分502径向向内延伸。止动部分502限定内止动表面512,并且内凸缘限定内凸缘表面514。步进表面516以垂直方式从内止动表面512延伸到内凸缘表面514。步进表面516可以形成任何合适的角度,包括但不限于垂直角度。步进表面516的角度可以与突起306a、306b、
…
、306n的角度相匹配。然而,这不是必要的限制。步进表面516暴露于第一端110。内凸缘504的右侧包括成角表面518。
41.成角表面518可以与突起306a、306b、
…
、306n的相应表面相匹配。然而,这不是必要的限制。在第二径向状态下,外止动表面506与载体402的外表面540齐平,并且内凸缘504延伸穿过第一孔412到达位于载体的径向内侧的位置处。
42.第二止动构件406包括止动部分522和内凸缘524。止动部分522包括外止动表面526。左倾斜表面528位于外止动表面526的左侧,并且右倾斜表面530位于外止动表面526的右侧。右倾斜表面530成一定角度,该角度与壳体102的第二倾斜表面228的角度相匹配。内凸缘524从止动部分522径向向内延伸。止动部分522限定内止动表面532,并且内凸缘限定内凸缘表面534。成角步进表面536从内止动表面532延伸到内凸缘表面534。成角步进表面536暴露于第二止动构件406的右侧。内凸缘524的左侧包括垂直表面538。垂直表面538的角度和成角步进表面536的角度可以与和这些表面相互作用的突起306a、306b、
…
、306n的相应表面相匹配。然而,这不是必要的限制。在扩展状态下,内止动表面534与载体402的内表面542齐平,并且内凸缘524延伸穿过第二孔414到达位于载体402的径向内侧的位置处。
43.图6至图12示出了机械步进器100的操作,以执行插入件104相对于壳体102的步进运动。插入件104在壳体102内沿共享纵向轴线移动。在各种实施方案中,插入件104的步进运动可用于递增地致动装置。
44.图6示出了壳体102内的插入件104的第一步骤以产生步进运动。步进套筒106位于第一位置或最右位置处,其中载体402紧靠腔室206的第二端壁210。在载体402的该位置处,第一止动构件404位于扩展区216内。由于第一止动构件404处于扩展状态(即,位于其平衡位置),因此其延伸到腔室的扩展外表面224。第二止动构件406被限制在第二受限区214内,并且处于塌缩状态(即,位于其平衡位置)。插入件104被定位成其突起306a、306b、
…
、306n位于壳体102的右侧,并在步进套筒106内沿第一方向从右向左移动,从而使第一突起306a(即,最左侧突起)与第二止动构件406的内凸缘524形成第一接触。
45.图7示出了用于产生步进运动的第二步骤。插入件104继续向左移动,从而在载体402上施加力以使其从第一位置向左移动到第二位置。第一突起306a推压成角步进表面536
以将载体402向左推动。当载体402向左移动时,第一止动构件404经由第一止动构件404的左倾斜表面508与壳体102的第一倾斜表面226之间的相互作用而被迫进入塌缩状态。
46.图8示出了用于产生步进运动的第三步骤。现在向左移动插入件104,将载体402放置在第二位置,在该第二位置,载体402紧靠腔室206的第一端壁208。第一止动构件404被限制在第一受限区212内,并且因此处于塌缩状态。第二止动构件406进入扩展区216。尽管第二止动构件406的平衡位置为塌缩状态,但是第一突起306a推压第二止动构件406的成角步进表面536以迫使其进入扩展状态。在第二止动构件406处于扩展状态的情况下,第一突起306a现在已经具有沿第一方向进一步运动的机会。第一突起306a在第二止动构件406下方移动并进入载体402的轨道内区域416。一旦第一突起306a位于轨道内区域416内并且不再位于第二止动构件406下方,第二止动构件406将塌缩回塌缩状态。
47.图9示出了用于产生步进运动的第四步骤。在载体402位于第二位置并且防止其进一步向左移动的情况下,插入件104继续向左移动以使第一突起306a抵靠第一止动构件404,从而防止插入件104的任何进一步向左运动。
48.图10示出了用于产生步进运动的第五步骤。在载体402位于第二位置的情况下,插入件104现在沿第二方向(向右)移动,从而使第一突起306a在垂直表面538处与第二止动构件406形成第二接触,该垂直表面与第一突起306a的垂直表面相匹配。
49.图11示出了用于产生步进运动的第六动作。插入件104继续沿第二方向移动,使第一突起306a推压第二止动构件406的内凸缘524的垂直表面538,从而将载体402移动回第一位置,在该第一位置,载体紧靠腔室206的第二端壁210,从而防止插入件104的任何进一步向右运动。因此,第二止动构件406在腔室206的第二受限区214内移动。第一止动构件404进入扩展区216并且抵靠扩展区216的扩展外表面224径向向外扩展,从而松弛回到扩展状态。
50.图12示出了用于产生步进运动的第七动作。插入件104再次沿第一方向移动。由于第一止动构件404处于扩展状态,因此第一突起306a不受阻碍地向左移动。实际上,插入件104与载体402之间没有基本接触,直到第二突起306b与第二止动构件406的成角步进表面536接触。此时,载体402位于与图6中相同的位置处。唯一的区别是第一突起306a已经移动穿过载体402,并且第二突起306b在图12中位于与第一突起306a在图6中的相同位置处。因此,第二突起现在位于适当位置,以重复图6至图12中概述的步进运动。因此,可以重复这些步骤,直到最终或最右侧突起306n穿过载体402的左侧。一旦最后一个突起306n已经穿过载体,插入件就可以返回到其最右位置,使用下面关于图13至图18所描述的方法。
51.图13至图18示出了用于相对于壳体102向右移动插入件104的方法。该方法使用插入件的槽状轨道320将突起306a、306b、
…
、306n与载体402的第一止动构件404和第二止动构件406对准或未对准。
52.图13示出了机械步进器100的插入件104,其中该插入件的突起306a、306b、
…
、306n位于步进套筒106的左侧。第一突起组304被示出为位于与第一孔组418相同的周向位置1302处。类似地,第二突起组310与第二孔组420周向对准,并且第三突起组312与第三孔组422对准。在该配置中,将插入件104和步进套筒106对准以产生步进运动,如图6至图12中先前所示。
53.由于突起306a、306b、
…
、306n全部移动到载体402的左侧,因此载体402的耳状物430位于第一轴向狭槽322的最右端。
54.图14示出了用于使插入件104旋转脱离与载体402的对准的运动。由于第二成角横向狭槽328的对角轨线,进一步向左(沿第一方向)移动插入件104使得载体402相对于插入件104旋转,从而将耳状物430与第二轴向狭槽324对准。因此,第一突起组304不再位于与第一孔组418相同的周向位置1302处,而是位于周向位置1402处。类似地,第二突起组310脱离与第二孔组420的对准,并且第三突起组312脱离与第三孔组422的对准。
55.图15示出了沿第二方向相对于步进套筒106处于自由轴向运动的插入件104,其中突起组从它们相应的孔组周向地移位。耳状物430现在沿第二轴向狭槽324移动。
56.图16示出了在图15的运动之后已经移动到步进套筒106的右侧的插入件。耳状物430现在位于第二轴向狭槽324内的最左位置处。
57.图17示出了用于使插入件104旋转成与载体402对准以产生步进运动的运动。由于第一成角横向狭槽326的对角轨线,进一步向右(沿第二方向)移动插入件104使得载体402相对于插入件104旋转,从而将耳状物430与第一轴向狭槽322对准。因此,第一突起组304被放置在与第一孔组418相同的周向位置1302处。在该对准中,当插入件再次沿第一方向移动时,突起306a、3062b、
…
、306n可以与第一止动构件和第二止动构件相互作用,从而产生图6至图12中描述的步进运动。
58.图18示出了机械步进器100的操作,以便控制流体通过壳体102的流动。插入件104包括用于流体流动穿过其中的流动通道。第二壳体区段204轴向地延伸并且包括多个端口1802。插入件104在第二壳体区段204内的相对位置决定有多少端口1802将由插入件覆盖,并且因此决定经由端口1802进入第二壳体区段204的流体的量。当插入件104位于最右侧时,插入件将覆盖所有端口1802。当插入件104向左移动时,另一端口1802未被插入件104覆盖。端口1802之间的间隔可以与突起306a、3062b、
…
、306n之间的间隔相同。由于施加的力,插入件104可以移动穿过壳体102。在各种实施方案中,施加的力可以是液压力、机械力、电力、磁力、电磁力等。力可以通过机械操作的致动器、电操作的致动器等施加。机械步进器100可以调节通过插入件104和通过壳体102的流体的流动。
59.图19示出了另一实施方案中的机械步进器1900。机械步进器1900包括壳体1902、插入件1904和步进套筒1906。腔室或凹陷部1908形成在插入件的外表面上,并且步进套筒1906驻留在凹陷部1908内。壳体1902包括突起1910a、
…
、1910n,其与步进套筒的第一止动构件1912和第二止动构件1914相互作用以便使插入件以增量方式移动穿过壳体。第一止动构件1912和第二止动构件1914的径向取向与第一止动构件404和第二止动构件406的径向取向相反,从而允许与突起1910a、
…
、1910n相互作用以改变其径向状态。对于止动构件1912和止动构件1914,第一止动构件1912的平衡位置位于径向向内位置处,并且第二止动构件1914的平衡位置为径向向外位置。
60.在另一个实施方案中,机械步进器可以通过例如跟踪已经经过步进套筒的突起的数目或通过跟踪未被插入件覆盖的端口的数目来用作计数器。
61.下面示出了前述公开的一些实施方案:
62.实施方案1:一种递增地致动装置的方法,该方法包括:将插入件放置在壳体内,该壳体具有腔室和位于该腔室内的步进套筒,该步进套筒包括具有由第一平衡直径限定的平衡位置的第一止动构件和具有由小于该第一平衡直径的第二平衡直径限定的平衡位置的第二止动构件;该插入件包括第一突起;移动该插入件穿过该壳体;以及通过改变该第一止
动构件的直径和该第二止动构件的直径,经由该第一突起,递增地限制该插入件穿过该壳体的运动。
63.实施方案2:根据任一先前实施方案所述的方法,其中穿过该壳体递增地移动该插入件进一步包括:在该第一突起与该第二止动构件之间形成第一接触,其中该步进套筒位于该腔室内的第一位置;沿第一方向移动该插入件以经由该第一接触使该步进套筒从该第一位置移动到该腔室内的第二位置;沿该第一方向移动该插入件以使该第一突起移动经过该第二止动构件;沿该第一方向移动该插入件以移动该第一突起以接触该第一止动构件;沿第二方向移动该插入件以经由该第一突起与该第二止动构件之间的第二接触使该步进套筒移动回该第一位置;以及沿该第一方向移动该插入件以使该第一突起移动经过该第一止动构件。
64.实施方案3:根据任一先前实施方案所述的方法,其中将该步进套筒移动到该第二位置使该第一止动构件从其平衡位置塌缩,并且将该步进套筒移动到该第一位置允许该第一止动构件扩展回其平衡位置。
65.实施方案4:根据任一先前实施方案所述的方法,其中该腔室进一步包括扩展区和受限区,其中当该步进套筒位于该第一位置时,该第一止动构件位于该扩展区中,并且当该步进套筒位于该第二位置时,该第一止动构件位于该受限区中。
66.实施方案5:根据任一先前实施方案所述的方法,其中使该第一突起移动经过该第一止动构件将第二突起放置为与该第二止动构件接触。
67.实施方案6:根据任一先前实施方案所述的方法,进一步包括旋转该第一止动构件和该第二止动构件以使该第一止动构件和该第二止动构件脱离与该第一突起的对准,以在不移动该步进套筒的情况下移动该插入件。
68.实施方案7:根据权利要求1所述的方法,该方法进一步包括由于施加到该插入件的力而移动该插入件。
69.实施方案8:根据任一先前实施方案所述的方法,其中相对于该壳体移动该插入件打开通向流动通道的端口。
70.实施方案9:根据任一先前实施方案所述的方法,其中该步进套筒的移动以及该第一止动构件和该第二止动构件的移动引起该插入件的运动。
71.实施方案10:一种机械步进器,该机械步进器包括:壳体,该壳体在内径表面上具有腔室;步进套筒,该步进套筒位于该腔室内,该步进套筒包括具有由第一平衡直径限定的平衡位置的第一止动构件和具有由小于该第一平衡直径的第二平衡直径限定的平衡位置的第二止动构件;和插入件,该插入件位于该壳体内并且能够相对于该壳体移动,该插入件包括突起;其中该插入件经由该插入件上的该突起与该第一止动构件和该第二止动构件之间的相互作用递增地移动穿过该壳体。
72.实施方案11:根据任一先前实施方案所述的机械步进器,其中该第一止动构件和该第二止动构件中的至少一者是c形环。
73.实施方案12:根据任一先前实施方案所述的机械步进器,其中当该步进套筒位于该腔室内的第一位置时,该第一止动构件处于其平衡位置,并且当该步进套筒位于该腔室内的第二位置时,该第一止动构件处于塌缩位置。
74.实施方案13:根据任一先前实施方案所述的机械步进器,其中该腔室进一步包括
扩展区和第一受限区,其中当该步进套筒位于该第一位置时,该第一止动构件位于该扩展区中,并且当该步进套筒位于该第二位置时,该第一止动构件位于该第一受限区中。
75.实施方案14:根据任一先前实施方案所述的机械步进器,其中该腔室进一步包括第二受限区,其中当该步进套筒位于该第一位置时,该第二止动构件位于该第二受限区中,并且当该步进套筒位于该第二位置时,该第二止动构件位于该扩展区中。
76.实施方案15:根据任一先前实施方案所述的机械步进器,其中该插入件进一步包括用于旋转该第一止动构件和该第二止动构件以使该第一止动构件和该第二止动构件脱离与该突起的对准的槽状轨道。
77.实施方案16:根据任一先前实施方案所述的机械步进器,其中该壳体包括端口,其中施加到该插入件的力使该插入件相对于该壳体移动以露出该端口。
78.实施方案17:一种机械步进器,该机械步进器包括:壳体,该壳体在内径表面上具有突起;插入件,该插入件位于该壳体内并且能够相对于该壳体移动,该插入件包括位于其外表面上的腔室;和步进套筒,该步进套筒位于该腔室内,该步进套筒包括具有由第一平衡直径限定的平衡位置的第一止动构件和具有由大于该第一平衡直径的第二平衡直径限定的平衡位置的第二止动构件;其中该插入件经由该壳体上的该突起与该第一止动构件和该第二止动构件之间的相互作用递增地移动穿过该壳体。
79.在描述本发明的上下文中(特别是在所附权利要求的上下文中),术语“一个”、“一种”和“该”以及类似指代的使用应被解释为涵盖单数和复数,除非在本文另外指明或与上下文明显地矛盾。此外,应当指出的是,本文的术语“第一”、“第二”等并不表示任何顺序、数量或重要性,而是用来将一个元素与另一个元素区分开。与数量结合使用的修饰语“约”包含所陈述的值并且具有由上下文决定的含义(例如,其包括与特定数量的测量相关联的误差度)。
80.本公开的教导内容可用于多种井操作。这些操作可涉及使用一种或多种处理剂来处理地层、地层中驻留的流体、井筒、和/或井筒中的设备,诸如生产管材。处理剂可以是液体、气体、固体、半固体、以及它们的混合物的形式。例示性的处理剂包括但不限于压裂液、酸、蒸汽、水、盐水、防腐剂、粘固剂、渗透性调节剂、钻井泥浆、乳化剂、破乳剂、示踪剂、流动性改进剂等。例示性的井操作包括但不限于水力压裂、增产、示踪剂注入、清洁、酸化、蒸汽注入、注水、固井等。
81.虽然已参考一个或多个示例性实施方案描述了本发明,但本领域的技术人员将理解,在不脱离本发明的范围的情况下,可作出各种改变并且可用等同物代替其元件。另外,在不脱离本发明的基本范围的情况下,可作出许多修改以使特定情形或材料适应本发明的教导内容。因此,预期的是,本发明不限于作为设想用于实现本发明的最佳模式而公开的特定实施方案,而是本发明将包括落入权利要求书的范围内的所有实施方案。另外,在附图和具体实施方式中,已公开了本发明的示例性实施方案,并且尽管已采用了特定术语,但除非另外指明,否则它们仅以一般性和描述性意义使用,而非出于限制的目的,否则本发明的范围因此并不限于此。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。