技术特征:
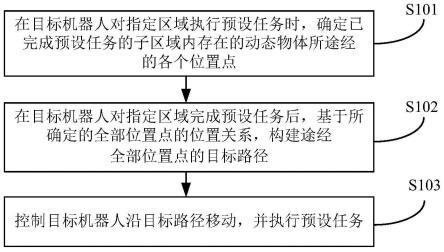
1.一种机器人控制方法,其特征在于,所述方法包括:在目标机器人对指定区域执行预设任务时,确定已完成所述预设任务的子区域内存在的动态物体所途经的各个位置点;在所述目标机器人对所述指定区域完成所述预设任务后,基于所确定的全部位置点的位置关系,构建途经所述全部位置点的目标路径;控制所述目标机器人沿所述目标路径移动,并执行所述预设任务。2.根据权利要求1所述的方法,其特征在于,所述确定已完成所述预设任务的子区域内存在的动态物体所途经的各个位置点,包括:利用跟踪算法,对已完成所述预设任务的子区域内存在的动态物体进行跟踪,得到所述动态物体所途经的各个位置点。3.根据权利要求2所述的方法,其特征在于,所述利用跟踪算法,对已完成所述预设任务的子区域内存在的动态物体进行跟踪,得到所述动态物体所途经的各个位置点,包括:获取按照预设时间间隔采集的区域场景信息;对每个区域场景信息进行动态物体检测,得到检测结果,并在所述检测结果表征已完成所述预设任务的子区域内存在动态物体时,确定所检测到的动态物体的位置信息;基于确定的各个位置信息,确定已完成所述预设任务的子区域内存在的动态物体所途经的各个位置点。4.根据权利要求3所述的方法,其特征在于,所述方法还包括:针对检测到动态物体的第一个区域场景信息,确定所检测到的动态物体的特征信息,并为所检测到的动态物体添加物体标识;针对采集时间在所述第一个区域场景信息的采集时间之后的每个区域场景信息,在所得到的检测结果表征所述子区域内存在动态物体时,确定所检测到的动态物体的目标特征信息,并判断针对上一个区域场景信息所检测到的动态物体的特征信息中,是否存在与所示目标特征信息相匹配的指定特征信息;若存在,则为针对该区域场景信息所检测到的动态物体添加指定物体标识;其中,所述指定物体标识为:特征信息为所述指定特征信息的动态物体所添加有的物体标识;若不存在,则为针对该区域场景信息所检测到的动态物体添加新的物体标识;所述基于确定的各个位置信息,确定已完成所述预设任务的子区域内存在的动态物体所途经的各个位置点,包括:基于所检测到的全部动态物体所添加有的物体标识和所确定的全部位置信息,确定已完成所述预设任务的子区域内存在的动态物体所途经的各个位置点。5.根据权利要求4所述的方法,其特征在于,所述基于所检测到的全部动态物体所添加有的物体标识和所确定的全部位置信息,确定已完成所述预设任务的子区域内存在的动态物体所途经的各个位置点,包括:对添加有相同物体标识的动态物体的各个位置信息进行路径构建,得到至少一条初始路径;针对每条初始路径,按照预设离散步长,对该初始路径进行离散,得到多个离散点,并基于所述多个离散点,确定已完成所述预设任务的子区域内存在的动态物体所途经的各个位置点。
6.根据权利要求5所述的方法,其特征在于,所述对添加有相同物体标识的动态物体的各个位置信息进行路径构建,得到至少一条初始路径,包括:针对每个物体标识,若添加有该物体标识的动态物体的位置信息的数量大于预设数量,则对添加有该物体标识的动态物体的各个位置信息进行路径构建,得到初始路径。7.根据权利要求5或6所述的方法,其特征在于,所述针对每条初始路径,按照预设离散步长,对该初始路径进行离散,得到多个离散点,包括:针对每条长度大于预设长度的初始路径,按照预设离散步长,对该初始路径进行离散,得到多个离散点。8.根据权利要求3所述的方法,其特征在于,所述区域场景信息包括:图像信息和/或激光点云。9.根据权利要求1所述的方法,其特征在于,所述基于所确定的全部位置点的位置关系,构建途经所述全部位置点的目标路径,包括:基于所确定的全部位置点的位置关系,以及所述全部位置点中的每两个位置点之间的连通关系,构建以所述目标机器人的当前位置为起点,且途经所述全部位置点的目标路径;其中,所述连通关系为:根据每两个位置点之间的障碍物存在情况所确定的关系。10.根据权利要求1所述的方法,其特征在于,所述目标机器人为清洁机器人,所述预设任务为清洁任务。11.一种机器人控制装置,其特征在于,所述装置包括:传感器,用于在目标机器人对指定区域执行预设任务时,采集所述目标机器人的移动信息和所述目标机器人所处环境的空间信息;处理器,用于根据所述传感器采集的所述目标机器人的移动信息和所述目标机器人所处环境的空间信息,确定已完成所述预设任务的子区域;在目标机器人对指定区域执行预设任务时,确定已完成所述预设任务的子区域内存在的动态物体所途经的各个位置点;在所述目标机器人对所述指定区域完成所述预设任务后,基于所确定的全部位置点的位置关系,构建途经所述全部位置点的目标路径;控制所述目标机器人沿所述目标路径移动,并执行所述预设任务。12.根据权利要求11所述的装置,其特征在于,所述传感器,还用于采集所述目标机器人在移动过程中的区域场景信息;所述处理器,具体用于获取按照预设时间间隔采集的区域场景信息,对每个区域场景信息进行动态物体检测,得到检测结果,并在所述检测结果表征已完成所述预设任务的子区域内存在动态物体时,确定所检测到的动态物体的位置信息;基于确定的各个位置信息,确定已完成所述预设任务的子区域内存在的动态物体所途经的各个位置点。13.根据权利要求11所述的装置,其特征在于,所述处理器,具体用于:对添加有相同物体标识的动态物体的各个位置信息进行路径构建,得到至少一条初始路径;针对每条初始路径,按照预设离散步长,对该初始路径进行离散,得到多个离散点,并基于所述多个离散点,确定已完成所述预设任务的子区域内存在的动态物体所途经的各个位置点。14.一种机器人,其特征在于,包括处理器、通信接口、存储器和通信总线,其中,处理
器,通信接口,存储器通过通信总线完成相互间的通信;存储器,用于存放计算机程序;处理器,用于执行存储器上所存放的程序时,实现权利要求1-10任一所述的方法步骤。15.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-10任一所述的方法步骤。
技术总结
本发明实施例提供了一种机器人控制方法、装置及一种机器人,涉及机器人技术领域。该方法包括:在目标机器人对指定区域执行预设任务时,确定已完成预设任务的子区域内存在的动态物体所途经的各个位置点;在目标机器人对指定区域完成预设任务后,基于所确定的全部位置点的位置关系,构建途经全部位置点的目标路径;控制机器人沿目标路径移动,并执行预设任务。与相关技术相比,应用本发明实施例提供的方案,可以增强机器人的清洁效果。可以增强机器人的清洁效果。可以增强机器人的清洁效果。
技术研发人员:江建文
受保护的技术使用者:杭州萤石软件有限公司
技术研发日:2022.06.22
技术公布日:2022/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。