1.本发明涉及仿生机械装置技术领域,具体涉及一种三合一仿生变色龙机器人。
背景技术:
2.为了逃避天敌的侵犯和接近自己的猎物,在复杂环境中得以生存,变色龙在受到威胁时,不仅可以逃之夭夭,而且还可以通过改变皮肤颜色恐吓天敌或是伪装自己。生物这类环境自适应行为,启发了科学家们研发具有自适应功能的软体驱动器和机器人。
3.然而,目前对于变色龙的仿生,普遍是通过分析变色龙皮肤变色的机制,采用热致变色材料来实现其变色功能,用于隐蔽智能机器人(侦察机器人)或隐身衣、伪装军服等,在军事隐身、在伪装和防伪等领域具有潜在的应用价值。除了对于变色龙变色功能的研究外,变色龙灵活的舌头也是研究的一个方向。变色龙有很长很灵敏且极具黏性的舌头,在捕食时可快速地直射出来,粘住猎物,舌头的抓取功能可用于与机械手臂的末端相连,实现抓取各种形状的物体,取代传统的机械手。
技术实现要素:
4.本发明的目的是提供一种三合一仿生变色龙机器人。
5.本发明的目的可以通过以下技术方案来实现:一种三合一仿生变色龙机器人,包括腿部机械机构、头部舌头弹射抓取装置、身体变色装置、承重装置、力源传输机构和控制系统;
6.所述腿部机械机构、头部舌头弹射抓取装置和身体变色装置设置在承重装置上,腿部机械机构和头部舌头弹射抓取装置连接力源传输机构,控制系统控制力源传输机构和身体变色装置。
7.优选地,所述的腿部机械机构包括主动连杆、腿部第一关节、上平行连杆、下l形连杆、腿部第二关节、腿部第三关节和爪子;
8.所述力源源传输机构带动主动连杆左右运动,主动连杆连接腿部第一关节,驱动腿部第一关节前后运动,腿部第一关节带动上平行连杆、下l形连杆、腿部第二关节、腿部第三关节和爪子前后运动。
9.进一步优选地,所述的腿部机械机构还包括滑块、中心连接板、拉簧、球头连杆和限位板;
10.所述主动连杆连接拉簧和滑块,拉簧和滑块连接中心连接板,中心连接板连接球头连杆,球头连杆连接下l形连杆,主动连杆通过限位板限位,限位板和腿部第一关节连接承重装置;
11.所述主动连杆带动拉簧、滑块和中心连接板实现左右运动,中心连接板带动球头连杆上下运动,球头连杆带动下l形连杆上下运动,下l形连杆带动腿部第二关节、腿部第三关节和爪子上下运动。
12.更进一步优选地,每一所述腿部机械机构都包括一个主动连杆,两个腿部第一关
节,四个上平行连杆,四个下l形连杆,一个限位板,一个滑块,两个球头连杆,两个拉簧,两个腿部第二关节,两个腿部第三关节,十个爪子,一个中心连接板;所述主动连杆连接两个腿部第一关节;所述两个腿部第一关节连接四个上平行连杆,四个下l形连杆;所述四个上平行连杆,四个下l形连杆连接两个腿部第二关节;所述两个腿部第二关节连接两个腿部第三关节;所述两个腿部第三关节连接十个爪子;所述主动连杆连接两个拉簧和一个滑块;两个拉簧和一个滑块连接中心连接板;所述中心连接板连接四个下l形连杆。
13.优选地,所述的头部舌头弹射抓取装置包括摩擦轮、侧板、弹射管和枪管;
14.所述摩擦轮连接侧板,弹射管连接摩擦轮,枪管设置在弹射管外侧,侧板和枪管连接承重装置;
15.所述摩擦轮旋转将弹射管弹射出去,反转将弹射管拉回枪管。
16.进一步优选地,所述的舌头弹射抓取装置还包括收纳轮,所述的收纳轮设置在承重装置上。
17.优选地,每一所述头部舌头弹射抓取装置都包括一个收纳轮,两个摩擦轮,两个侧板,一个枪管,一个弹射管。所述侧板连接前连接板;所述两个摩擦轮连接侧板;所述一个枪管连接前连接板;所述一个弹射管连接一个枪管;所述一个收纳轮连接前连接板。所述弹射管最前端设置有吸盘。
18.优选地,所述的身体变色装置包括脊柱、肋骨、尾巴和变色灯带;
19.所述肋骨连接脊柱,变色灯带连接肋骨,尾巴连接肋骨尾端,脊柱连接承重装置。
20.进一步优选地,所述的身体变色装置包括一个脊柱、九个肋骨、九节尾巴和rgb变色灯带;
21.位于首尾位置的肋骨分别连接承重装置的前后位置,位于首位的尾巴连接承重装置后部位置。
22.更进一步优选地,每一所述身体变色装置包括头部、骨架;所述骨架包括九个肋骨,一个脊柱、九节尾巴;所述九个肋骨包括三个长肋骨,六个个短肋骨;所述九个肋骨连接一个脊柱;所述九节尾巴连接后连接板;所述rgb变色灯带连接九个肋骨。
23.优选地,所述的承重装置包括长玻纤连杆、短玻纤连杆、铝方管、前连接板、后连接板和铜柱;
24.所述长玻纤连杆连接前连接板和后连接板,短玻纤连杆连接腿部机械机构,铜柱设置在铝方管上,用于支撑身体变色装置。
25.进一步优选地,所述的铝方管中间放电池,前连接板和/或后连接板上放置舵机。
26.更进一步优选地,每一所述承重装置包括六个玻纤连杆、两个铝方管、前连接板、后连接板、一个铜柱。所述六个玻纤连接杆包括四个长玻纤连接杆,两个短玻纤连接杆;所述前连接板连接两个长玻纤连接杆;所述两个长玻纤连接杆连接后连接板;所述两个短玻纤连接杆连接两个长玻纤连接杆;所述两个铝方管连接四个长玻纤连接杆;所述一个铜柱连接一个铝方管。
27.优选地,所述的力源传输机构包括两个舵机、一个电机和一个减速电机,两个舵机分别驱动位于承重装置前后两侧的腿部机械机构,电机驱动舌头弹射抓取装置,减速电机驱动身体变色装置;所述控制系统包括开发板和视觉识别模块。
28.所述的控制系统控制机器人的腿部行走、舌头弹射抓取以及身体变色。
29.进一步优选地,所述控制系统包括一个开发板,开发板为arduino控制;所述舵机为sg90系列舵机;所述电机为snail 2305电机;所述减速电机为5v减速电机;所述视觉识别模块为open mv视觉识别模块;所述开发板固定在两个铝方管;所述两个舵机分别连接在前连接板和后连接板;所述一个电机固定在前连接板;所述一个减速电机连接九节尾巴;所述视觉模块固定在前连接板。
30.更进一步优选地,所述控制系统连接hc05蓝牙模块驱动。
31.优选地,所述主动连杆,上平行连杆,下l形连杆,限位板,腿部第三关节,爪子,侧板,玻纤连杆,前连接板、后连接板为玻纤材料;所述腿部第一关节,腿部第二关节,中心连接板,骨架,枪管,弹射管为3d打印材料;所述滑块,球头连杆,拉簧为金属材料;所述铝方管为铝制材料;所述铜柱为铜制材料。
32.本发明基于仿生学原理,设计了一款具有变色龙步态特征、舌头抓取特点以及身体变色特点三合一的多功能仿生变色龙机器人。该仿生变色龙机器人结构紧凑,行走灵活稳定,具有一定的抓取功能,并且可根据环境来自适应调整身体颜色,可以实现一定条件下的隐蔽探测、动态伪装及危险环境下抓取物品等工作。可应用在日常生活中,发挥结构紧凑体型小的优势和舌头伸长抓取的功能,进入狭窄的地方,通过舌头对垃圾或物品的抓取达到清洁、整理的效果。还可作为益智娱乐玩具及中小学生科教科普的智能教具,寓教于乐,增强直观认识及动手创作能力,开发大脑思维。
33.与现有技术相比,本发明具有以下优点:
34.1.本发明通过腿部机械机构、头部舌头弹射抓取装置、身体变色装置、承重装置、力源传输机构和控制系统的配合设置,得到了具有变色龙步态特征、舌头抓取特点以及身体变色特点三合一的多功能仿生变色龙机器人;
35.2.本发明设计巧妙,腿部机械机构通过单舵机控制对角线腿部运动,以实现多自由度运动,行走时,舵机臂左右摆动,控制主动连杆实现左右运动,从而带动腿部第一关节使其实现前后运动,腿部第一关节带动其余连杆机构进行前后运动;主动连杆带动拉簧,滑块,中心连接板实现左右运动,中心连接板带动球头连杆上下运动,球头连杆带动其余连杆机构上下运动,通过舵机的左右转动,以及各个连杆之间的相互配合,使一个舵机可以同时控制两条腿有规律的上下前后运动;
36.3.本发明舌头弹射抓取装置通过摩擦轮来实现舌头的弹射抓取功能,可实现远程抓取再收回的功能;
37.4.本发明身体变色装置仿照变色龙的身体骨架来进行设计,尾巴采用分节的结构,通过线拉使得尾巴实现上下摇摆卷曲,从头部、肋骨到尾巴上都布满rgb变色灯带,通过搭载open mv视觉识别后,使得仿生变色龙机器人实现变色功能,可实时匹配背景颜色,实现“主动”伪装;
38.5.本发明每个舵机都通过pwm输出调整占空比进行相应角度的转动:第一部分头部舌头弹射抓取装置通过电机连接摩擦轮,配合相应零件进行舌头的伸缩操作;第二部分腿部前后各连接一个舵机,配合各零件进行腿部的行走操作;第三部分变色结构通过rgb灯带进行变色展示;
39.6.本发明框架由玻纤材料构成,重量轻,且尺寸大小对运行机构影响小,可灵活更改,适应于不同的场合;
40.7.本发明控制系统连接hc05蓝牙模块驱动,可通过蓝牙模块与手机app相连实现对仿生变色龙的控制与信息传递;
41.8.本发明可适用于一定条件下的隐蔽探测、动态伪装及危险环境下抓取物品等工作,亦可用于日常生活,发挥结构紧凑体型小的优势和舌头伸长抓取的功能,进入狭窄的地方,通过舌头对垃圾或物品的抓取达到清洁、整理的效果,还可应用于休闲娱乐及科教普及,作为益智娱乐玩具及中小学生科创科普的智能教具。
附图说明
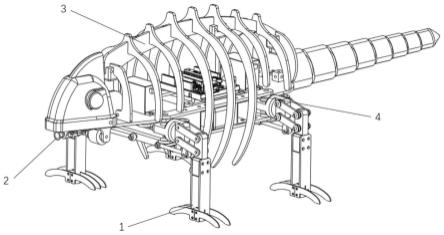
42.图1为本发明实施例的三合一仿生变色龙机器人的结构示意图;
43.图2为本发明实施例的腿部机械机构的结构示意图;
44.图3为本发明实施例的头部舌头弹射抓取装置的结构示意图;
45.图4为本发明实施例的身体变色装置的结构示意图;
46.图5为本发明实施例的承重装置的结构示意图;
47.图中:1-腿部机械机构,11-主动连杆,12-腿部第一关节,13-上平行连杆,14-下l形连杆,15-腿部第二关节,16-腿部第三关节,17-爪子,18-滑块,19-中心连接板,110-拉簧,111-球头连杆,112-限位板,2-头部舌头弹射抓取装置,21-摩擦轮,22-侧板,23-弹射管,24-枪管,3-身体变色装置,31-脊柱,32-肋骨,33-尾巴,4-承重装置,41-长玻纤连杆,42-短玻纤连杆,43-铝方管,44-前连接板,45-后连接板,46-铜柱。
具体实施方式
48.下面结合附图和具体实施例对本发明进行详细说明。以下实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
49.实施例1
50.一种三合一仿生变色龙机器人,包括用于行走的腿部机械机构1、用于实现抓取功能的头部舌头弹射抓取装置2和用于变色的身体变色装置3,上述三个部分设置在承重装置4上,力源传输机构用于驱动腿部机械机构1和头部舌头弹射抓取装置2,控制系统控制力源传输机构和身体变色装置3,实现对腿部机械机构1、头部舌头弹射抓取装置2和身体变色装置3的控制。
51.实施例2
52.如图1~5所示,本实施例的一种三合一仿生变色龙机器人,包括:力源传输机构、控制系统、腿部机械机构1、头部舌头弹射抓取装置2、身体变色装置3、承重装置4。控制系统链接力源传输机构;力源传输机构包括舵机、舵机臂、摩擦轮;力源传输机构分别在腿部机械机构1、头部舌头弹射抓取装置2都有安装。腿部机械机构1通过铜柱46与身体变色装置3连接;头部舌头弹射抓取装置2通过前连接板44与身体变色装置3连接;腿部机械机构1包括主动连杆11,两个腿部第一关节12,四个上平行连杆13,四个下l形连杆14,两个腿部第二关节15,两个腿部第三关节16,十个爪子17,一个滑块18,一个中心连接板19,两个拉簧110,两个球头连杆111,一个限位板112;身体变色装置3包括头部、骨架、尾巴和rgb变色灯带,支撑起变色龙的整个身体;头部舌头弹射抓取装置2包括两个摩擦轮21,两个侧板22,一个弹射
管23,一个枪管24,一个收纳轮(图中未标出);承重装置4包括四个长玻纤连杆41、两个短玻纤连杆42、两个铝方管43、前连接板44、后连接板45、一个铜柱46,承重装置4与腿部机械机构1及身体变色装置3连接,承载变色龙身体。
53.如图2、图5,每一主动连杆11连接两个腿部第一关节12;两个腿部第一关节12连接四个上平行连杆13,四个下l形连杆14;四个上平行连杆13,四个下l形连杆14连接两个腿部第二关节15;所述两个腿部第二关节15连接两个腿部第三关节16;所述两个腿部第三关节16连接十个爪子17;所述主动连杆11连接两个拉簧110和一个滑块18;两个拉簧110和一个滑块18连接中心连接板19;中心连接板19连接球头连杆111;球头连杆111连接四个下l形连杆14;一个限位板112连接四个长玻纤连杆41;两个腿部第一关节12连接两个短玻纤连杆42以及前连接板44或后连接板45。
54.驱动时,舵机臂控制主动连杆11实现左右运动;主动连杆11连接两个腿部第一关节12使腿部第一关节12实现前后运动,同时腿部第一关节12带动四个上平行连杆13,四个下l形连杆14,两个腿部第二关节15,两个腿部第三关节16,十个爪子17进行前后运动。主动连杆11带动两个拉簧110,一个滑块18,中心连接板19实现左右运动;一个限位板112在中心连接板19移动时起到限位作用;中心连接板19带动球头连杆111上下运动;球头连杆111带动四个下l形连杆14上下运动;四个下l形连杆14带动两个腿部第二关节15,两个腿部第三关节16,十个爪子17上下运动。
55.其优势在于,在驱动时只需要两个电机就可以控制四条腿进行运动,在承重方面,多数零件采用玻纤材料,在轻量化的同时保障材料的硬度。在减震、越障方面两个腿部第二关节15,两个腿部第三关节16中间可加装避震弹簧,提高在不同路况下,行走的平稳性。
56.如图4和图5,每九个肋骨32连接一个脊柱31;rgb变色灯带连接九个肋骨31;九节尾巴33连接九个肋骨32尾端;一个脊柱31连接一个铜柱46;九个肋骨31连接前连接板44和后连接板45;九节尾巴33连接后连接板45。
57.承重作用,一个铜柱46主要支撑起九个肋骨32和一个脊柱31。四个长玻纤连杆41主要作为头尾的连接件。两个铝方管43连接arduino开发板,两个铝方管43中间放电池,前连接板44或后连接板45上放置sg90系列舵机。九个肋骨32在起到装饰作用及连接rgb灯带的同时,还作为内部零件的一个保护外壳。九节尾巴33通过线拉可做到左右摇摆,在运动过程中,九节尾巴33可起到平衡作用。
58.请参阅图3、图5,每两个摩擦轮21连接侧板22;所述一个枪管24连接前连接板44;一个弹射管23连接一个枪管24;侧板22连接前连接板44;所述一个收纳轮设置在承重装置4的中间位置(变色龙机器人腹部),连接前连接板44,用于收纳连接在弹射管23后端的线。
59.驱动时,电机高速转动带动摩擦轮21;摩擦轮21高速旋转把一个弹射管23弹射出去;通过弹射管23最前端的吸盘吸住物体;此时电机反转带动摩擦轮21;摩擦轮21反转把弹射管23拉回到枪管24,连接在弹射管23后端的线收纳在收纳轮中。
60.控制系统各部分作用,仿生变色龙机器人通过arduino开发板对两个sg90舵机的控制实现行走功能,对snail 2305无刷电机的控制实现舌头的发射以及收回功能,通过对5v减速电机的控制来实现尾巴的摆动;同时采用open mv进行视觉识别,可提取视野内颜色阈值,从而控制rgb灯带颜色改变,进而实现变色功能。仿生变色龙也可通过蓝牙模块与手机app相连实现对仿生变色龙的控制与信息传递。
61.本发明采用仿生技术进行实现了变色龙机器人的变色、行走、抓取的功能,整体机械结构及电控简单。将仿生成果应用于隐蔽探测伪装、生活、休闲娱乐与科教科普,进行一定条件下的隐蔽探测、动态伪装及危险环境下抓取物品等工作;用于狭小地带等不方便垃圾清扫的地方,改善人们的生活,还可以作为益智娱乐玩具及中小学生科创科普的智能教具,寓教于乐。
62.上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和使用发明。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
