1.本实用新型涉及坯料夹持技术领域,具体涉及一种自适应夹爪结构。
背景技术:
2.目签多使用三爪气缸安装带钉齿手指来夹持毛坯件进行自动上下机床加工,夹爪气缸手指与坯料的接触为线接触,会在毛坯表面留下齿痕,并且因线接触的接触面积较少,有掉落产品现象。
3.公开号cn107932549a的发明专利公开一种自适应欠驱动转向三指机器人夹爪,公开号cn113799162a的发明专利公开一种面向异形物体的机器人抓取手爪,上述技术方案的重点在于通过不同的手指动作实现对不同物体的夹持,虽然有自适应能力,但目的不是改变线接触的缺陷。
4.公告号cn216180639u的实用新型专利公开一种通用于多工位系统的凸轮柔性机械手装置,夹爪由柔性材料制成,利用弹性形变应力夹紧物料,具有良好的自适应性。而柔性材料的使用存在夹持不紧的问题。
5.公开号的cn113954117a的发明专利公开一种基于范德华力和摩擦力的自适应机械爪,多个干黏附组件可根据待夹持件不规则的夹持面进行角度调节,使得每个干黏附组件的黏附垫均能完全黏附于待夹持件的夹持面上,实现稳定夹持的目的。上述技术方案存在结构复杂的问题。
技术实现要素:
6.本实用新型为了解决现有技术中的问题,提供一种自适应夹爪结构。
7.为解决上述技术问题,本实用新型采用如下技术方案:
8.一种自适应夹爪结构,包括夹爪气缸手指,所述夹爪气缸手指上面向坯料一侧设有自适应夹块,自适应夹块与夹爪气缸手指通过旋转轴转动连接,且自适应夹块面向坯料一侧设有与坯料表面配合的接触面。
9.进一步的,所述夹爪气缸手指为竖向设置,旋转轴为水平安装在夹爪气缸手指上的圆销,自适应夹块上设有水平的安装孔,自适应夹块由安装孔安装在圆销上并与其转动配合。
10.进一步的,所述圆销端部设有卡簧固定。
11.进一步的,所述坯料的夹持面为拔模面或圆柱面,自适应夹块的接触面为与圆柱面配合的圆柱弧面,或与拔模面配合的带斜度弧面。
12.进一步的,所述自适应夹块为水平置的凸形结构,自适应夹块与旋转轴的连接部设在小端,且夹爪气缸手指上设有与小端配合的避让槽;自适应夹块的接触面设在大端。
13.进一步的,所述夹爪气缸手指有三个,三个夹爪气缸手指安装在夹爪气缸上。
14.本实用新型的有益效果:
15.本实用新型在夹持毛坯状态时,夹爪气缸手指移动,自适应夹块接触坯料的夹持
面,使自适应夹块以旋转轴为轴自动旋转并完全贴合,起到增大接触面积(由线接触变面接触)的作用,从而达成毛坯状态的夹紧,并避免加工面的三伤。
16.本实用新型的应用能够避免破坏加工表面,并且能够适用加工前后拔模面及圆柱面的夹爪,在机器人自动上下工件时能提高抓取的可靠性及适用性。
附图说明
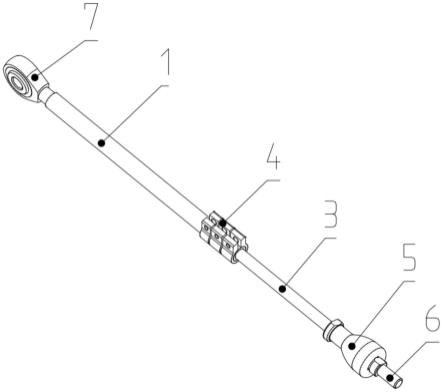
17.图1为本实用新型的整体结构示意图;
18.图2为图1的仰视图;
19.图3为图1的主视图;
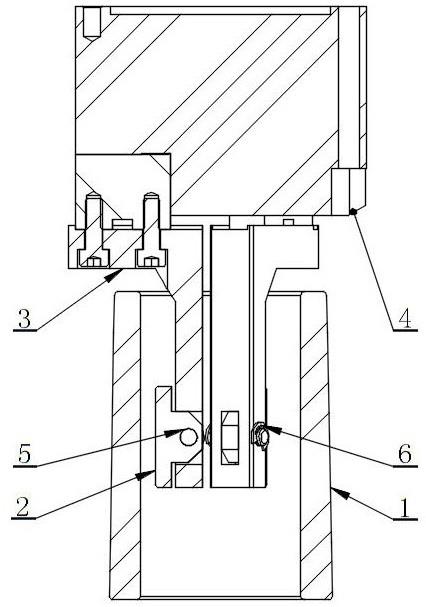
20.图4为图3中的a-a剖面图;
21.图5为本实用新型应用于拔模件的示意图。
22.附图仅用于示例性说明,不能理解为对本专利的限制;为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
24.实施例一:
25.如图1至图4所示,本实施例提供一种自适应夹爪结构,包括夹爪气缸4和安装在夹爪气缸4上的三个夹爪气缸手指3。
26.本实施例中,夹爪气缸手指为竖向设置,坯料1为竖直的筒形(本次实例产品规格为内径47mm、高91mm),其内壁也为圆柱面,三个夹爪气缸手指3位坯料1的中间腔体,当夹爪气缸手指向外移动时会夹紧坯料。
27.每个夹爪气缸手指3上面向坯料1一侧设有自适应夹块2,自适应夹块2与夹爪气缸手指3通过旋转轴转动连接,且自适应夹块2面向坯料1一侧设有与坯料表面配合的接触面。
28.本实施例中自适应夹块2安装方式如下:
29.旋转轴为水平安装在夹爪气缸手指上的圆销5,圆销5端部设有卡簧6固定。自适应夹块2为水平置的凸形结构,自适应夹块的小端设有水平的安装孔,自适应夹块2由安装孔安装在圆销5上并与其转动配合。同时,夹爪气缸手指3上设有与小端配合的避让槽,保证自适应夹块的竖向旋转。
30.自适应夹块2的接触面设在大端。本实施例中,接触面为与坯料1内壁圆柱面配合的圆柱弧面。
31.本实用新型在夹持毛坯状态时,夹爪气缸手指同时向外移动,自适应夹块2接触坯料1内壁,使自适应夹块2以圆销5为轴自动旋转并完全贴合,起到增大接触面积(由线接触变面接触)的作用,从而达成毛坯状态的夹紧,并避免加工面的三伤。
32.实施例二:
33.如图5所示,本实施例的自适应夹爪结构可适用拔模件加工前后的上下料夹持作业。拔模件坯料的内壁带有斜度,为拔模面。因此,自适应夹块2的接触面为与坯料1内壁拔
模面配合的带斜度弧面。
34.待加工完成内壁有拔模面时,亦可通过上述原理达成可靠的夹紧状态并避免加工面的三伤。因此,本实施例可适用拔模件加工前后的上下料夹持作业。
35.本实用新型的应用能够避免破坏加工表面,适用加工前后拔模面及圆柱面的夹爪,在机器人自动上下工件时能提高抓取的可靠性及适用性。
36.以上实施例仅用以说明而非限制本实用新型的技术方案,尽管参照上述实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解:依然可以对本实用新型进行修改或者等同替换,而不脱离本实用新型的精神和范围的任何修改或局部替换,其均应涵盖在本实用新型的权利要求范围当中。
37.如果本文中使用了“第一”、“第二”等词语来限定零部件的话,本领域技术人员应该知晓:“第一”、“第二”的使用仅仅是为了便于描述本实用新型和简化描述,如没有另外声明,上述词语并没有特殊的含义。
38.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为便于描述本实用新型和简化描述,而不是指示或暗指所指的装置或元件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本实用新型保护内容的限制。
技术特征:
1.一种自适应夹爪结构,包括夹爪气缸手指,其特征在于:所述夹爪气缸手指上面向坯料一侧设有自适应夹块,自适应夹块与夹爪气缸手指通过旋转轴转动连接,且自适应夹块面向坯料一侧设有与坯料表面配合的接触面。2.根据权利要求1所述的自适应夹爪结构,其特征在于:所述夹爪气缸手指为竖向设置,旋转轴为水平安装在夹爪气缸手指上的圆销,自适应夹块上设有水平的安装孔,自适应夹块由安装孔安装在圆销上并与其转动配合。3.根据权利要求2所述的自适应夹爪结构,其特征在于:所述圆销端部设有卡簧固定。4.根据权利要求1所述的自适应夹爪结构,其特征在于:所述坯料的夹持面为拔模面或圆柱面,自适应夹块的接触面为与圆柱面配合的圆柱弧面,或与拔模面配合的带斜度弧面。5.根据权利要求1-4任一项所述的自适应夹爪结构,其特征在于:所述自适应夹块为水平置的凸形结构,自适应夹块与旋转轴的连接部设在小端,且夹爪气缸手指上设有与小端配合的避让槽;自适应夹块的接触面设在大端。6.根据权利要求5所述的自适应夹爪结构,其特征在于:所述夹爪气缸手指有三个,三个夹爪气缸手指安装在夹爪气缸上。
技术总结
本实用新型公开了一种自适应夹爪结构,包括夹爪气缸手指,夹爪气缸手指上面向坯料一侧设有自适应夹块,自适应夹块与夹爪气缸手指通过旋转轴转动连接,且自适应夹块面向坯料一侧设有与坯料表面配合的接触面。本实用新型在夹持毛坯状态时,夹爪气缸手指移动,自适应夹块接触坯料的夹持面,使自适应夹块以旋转轴为轴自动旋转并完全贴合,起到增大接触面积(由线接触变面接触)的作用,从而达成毛坯状态的夹紧,并避免加工面的三伤。本实用新型的应用能够避免破坏加工表面,并且能够适用加工前后拔模面及圆柱面的夹爪,在机器人自动上下工件时能提高抓取的可靠性及适用性。能提高抓取的可靠性及适用性。能提高抓取的可靠性及适用性。
技术研发人员:张志伟 高益 林康康 耿凯霖 刘曾柱 皇甫青海 唐远志
受保护的技术使用者:商丘金振源电子科技有限公司
技术研发日:2022.06.02
技术公布日:2022/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。