1.本技术涉及消杀防疫技术领域,尤其涉及一种消杀防疫机器人。
背景技术:
2.随着人们生活水平的不断提高,人们对生活环境的要求也越来越高。因此,公共场所的消毒工作也必不可少。目前对空间进行消毒的工作主要由人工完成,人工消杀的效率过低,且存在一定的危险性。现有一些消毒防疫机器人,以机器人为载体,利用机器人进行室内或室外空间细菌或病毒的消杀。但现有机器人对消毒用灯管的固定不稳定,在使用时,容易造成接触不良或灯管碰撞破碎的问题。
技术实现要素:
3.为克服现有技术中的不足,本技术提供一种消杀防疫机器人。
4.本技术提供如下技术方案:
5.一种消杀防疫机器人,包括可移动的底盘、安装盘和壳体,所述底盘上设置所述安装盘,所述安装盘上设置所述壳体,所述壳体的四周均匀设置有多个消杀灯管,每一所述消杀灯管的一端通过第一灯管安装座与所述安装盘连接,另一端通过第二灯管安装座与所述壳体的顶部连接。
6.在一种可能的实施方式中,所述第一灯管安装座设置有灯管容纳腔,所述消杀灯管至少部分设置在所述灯管容纳腔内。
7.在一种可能的实施方式中,所述壳体的内部设置有第一安装板,所述第一安装板位于所述壳体的中部,并将所述壳体的内部分割成呈上下布置的第一容纳腔和第二容纳腔。
8.在一种可能的实施方式中,每一个所述消杀灯管均连接有电缆,至少部分所述电缆设置在所述壳体的内部,所述第一安装板设置有多个避让缺口,每一个所述电缆穿过相对应的一个所述避让缺口。
9.在一种可能的实施方式中,所述避让缺口在所述第一安装板的位置与所述消杀灯管的位置相对应。
10.在一种可能的实施方式中,所述第二容纳腔内具有竖向设置的第二安装板,所述第二安装板的两侧分别设置有电能供应装置,所述第二安装板通过连接板安装于所述第一安装板。
11.在一种可能的实施方式中,所述连接板分别与所述第一安装板、所述第二安装板相垂直,且所述连接板具有与所述第一安装板相平行的连接舌,所述连接舌与所述第二安装板的缺口相插接。
12.在一种可能的实施方式中,所述底盘顶部开设有容纳槽,所述安装盘设置在所述容纳槽内。
13.在一种可能的实施方式中,所述壳体的顶部设置有视觉摄像机。
14.在一种可能的实施方式中,所述视觉摄像机包括摄像头和顶壳,所述顶壳的底部设置有多个安装缺口,每一个所述第二灯管安装座设置于相应的一个所述安装缺口内,所述摄像头设置在所述顶壳的一侧,且所述摄像头位于所述第二灯管安装座上方。
15.相比现有技术,本技术的有益效果:
16.本技术提供的消杀防疫机器人,通过在可移动的底盘上设置安装盘及壳体,将多个消杀灯管均匀设于壳体的四周,使消杀灯管的一端通过第一灯管安装座与安装盘连接,另一端通过第二灯管安装座与所述壳体的顶部连接。从而使得消杀灯管稳定的安装在消杀防疫机器人中,提高了使用的稳定性。
17.为使本技术的上述目的、特征和优点能更明显和易懂,下文特举较佳实施例,并配合所附附图,做详细说明如下。
附图说明
18.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
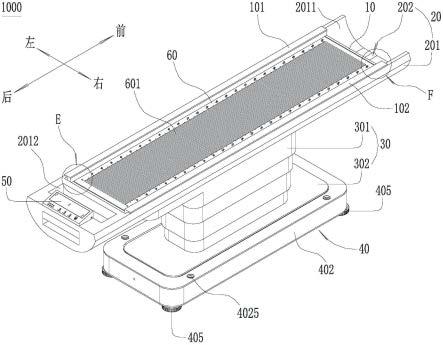
19.图1示出了本技术实施例提供的消杀防疫机器人的结构示意图;
20.图2示出了图1所述消杀防疫机器人的部分结构示意图;
21.图3示出了图1所述消杀防疫机器人去除壳体后的结构示意图;
22.图4示出了图3所示消杀防疫机器人a部分的放大示意图;
23.图5示出了图1所示消杀防疫机器人的部分分解结构示意图;
24.图6示出了图1所示消杀防疫机器人的剖视图;
25.图7示出了图1所示消杀防疫机器人的另一视角的结构示意图;
26.图8示出了图7所述消杀防疫机器人的部分结构示意图;
27.图9示出了图7所述消杀防疫机器人去除壳体后的结构示意图;
28.图10示出了图9所示消杀防疫机器人b部分的放大示意图;
29.图11示出了图7所示消杀防疫机器人的部分分解结构示意图。
30.主要元件符号说明:
31.100-消杀防疫机器人;10-底盘;11-天线;20-安装盘;30-壳体;301-第一容纳腔;302-第二容纳腔;31-第一安装板;311-避让缺口;32-第二安装板;33-连接板;331-连接舌;40-消杀灯管;41-第一灯管安装座;411-灯管容纳腔;42-第二灯管安装座;50-开关电源模块;60-灯管控制器;70-逆变器;80-网络控制器;90-视觉摄像机;91-摄像头;92-顶壳;921-安装缺口。
具体实施方式
32.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本技术,而不能理解为对本技术的限制。
33.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
34.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
35.在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
36.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
37.实施例一
38.请参阅图1及图7,本技术一实施例提供一种消杀防疫机器人100,所述消杀防疫机器人100用于对空间进行消毒,以提高环境的清洁度。
39.请同时参阅图2及图8,所述消杀防疫机器人100包括底盘10、安装盘20、壳体30和消杀灯管40。所述底盘10为安装基座,其可移动地放置于地面上。所述安装盘20、壳体30和消杀灯管40均设于所述底盘10上,以在所述底盘10的带动下一同移动。
40.具体的,所述底盘10上设置所述安装盘20。所述安装盘20上设置所述壳体30。多个所述消杀灯管40竖直布置,且围绕所述壳体30的外周设于所述安装盘20上。
41.每一所述消杀灯管40的一端通过第一灯管安装座41与所述安装盘20连接,另一端通过第二灯管安装座42与所述壳体30的顶部连接。
42.在一些实施例中,所述多个消杀灯管40均匀设于所述壳体30的四周,以使所述消杀防疫机器人100的重量更均匀,提高结构及移动时的稳定性,并对四周空间进行均匀消杀。
43.但不限于此,在其他实施例中,还可在所述底盘10移动方向的前侧设置较多数量的消杀灯管40,从而加强对移动方向前方空间的消杀效果,并可对消杀防疫机器人100的其他结构进行相应的调整,以使各部位的重量相对均匀。
44.在一些实施例中,所述底盘10为自主移动机器人(autonomous mobile robot,amr)或自动导航装置(automated guided vehicle,agv)。但不限于此,在其他实施例中,所述底盘10还可为其他自动移动或人工控制移动的机器人或移动装置。
45.在一些实施例中,所述安装盘20设于所述底盘10的中部,以提高结构的稳定性。
46.具体的,所述底盘10顶部的中间开设有容纳槽,所述安装盘20设置在所述容纳槽
内。
47.在一些实施例中,所述消杀灯管40为紫外灯管。但不限于此,在其他实施例中,所述消杀灯管40还可为其他可以实现消杀功能的灯管。
48.在一些实施例中,所述第一灯管安装座41设置有灯管容纳腔411。所述消杀灯管40至少部分设置在所述灯管容纳腔411内,以对所述消杀灯管40进行保护。
49.可以理解的,所述第二灯管安装座42也可设置灯管容纳腔411,以对所述消杀灯管40进行保护。
50.在一些实施例中,所述底盘10上还设有天线11。所述天线11用于收发控制信号及运行数据等。
51.本技术提供的消杀防疫机器人100,通过在可移动的底盘10上设置安装盘20及壳体30,将多个消杀灯管40均匀设于壳体30的四周,使消杀灯管40的一端通过第一灯管安装座41与安装盘20连接,另一端通过第二灯管安装座42与所述壳体30的顶部连接。从而使得消杀灯管40稳定的安装在消杀防疫机器人100中,提高了使用的稳定性。
52.实施例二
53.请参阅图1至图11,本实施例提供的一种消杀防疫机器人100,用于对空间进行消毒。本实施例是在上述实施例一的技术基础上做出的改进,相比于上述实施例一,区别之处在于:
54.如图3及图9所示,所述壳体30的内部设置有第一安装板31。所述第一安装板31位于所述壳体30的中部,且水平设置。请同时参阅图6,所述第一安装板31将所述壳体30的内部分割成呈上下布置的第一容纳腔301和第二容纳腔302。
55.所述第一容纳腔301和第二容纳腔302。分别容纳不同的元器件,如控制单元、电源、通讯单元、逆变器、警报单元等。
56.具体的,所述第一安装板31上设置有避让缺口311。所述避让缺口311的数量与所述消杀灯管的数量相对应。
57.每一个所述消杀灯管40均连接有电缆。至少部分所述电缆设置在所述壳体30的内部,且每一个所述电缆穿过相对应的一个所述避让缺口311。
58.在一些实施方式中,所述避让缺口311在所述第一安装板31上设置的位置与所述消杀灯管40的位置相对应,即避让缺口311的设置位置在所述消杀灯管40与壳体30中心的连线上,从而使得其与消杀灯管40之间的距离最短,电缆更易穿过布置,且结构更精简。
59.在一种可能的实施方式中,所述壳体30的内部还设置有第二安装板32。所述第二安装板32用于进一步对所述壳体30的内部进行分割。
60.具体的,所述第二安装板32设于所述第二容纳腔302内,且竖向设置。所述第二安装板32的两侧分别设置有电能供应装置。所述电能供应装置可以是逆变器、电池等为消杀灯管40供应电能的结构。
61.在一些实施例中,所述第一容纳腔301用于容纳开关电源模块50及灯管控制器60。所述第二容纳腔302用于容纳逆变器70及网络控制器80,所述第二安装板32的两侧分别设置逆变器70,以避免互相干扰。
62.但不限于此,在其他实施例中,所述第一容纳腔301及所述第二容纳腔302中容纳的元器件可根据需要进行调整。
63.具体的,所述第二安装板32通过连接板33安装于所述第一安装板31。
64.在一种可能的实施方式中,所述连接板33分别与所述第一安装板31、所述第二安装板32相垂直,以提高整体安装结构的稳定性。
65.具体的,请同时参阅图4及图10,所述连接板33具有连接舌331。所述连接舌331与所述第一安装板31相平行。所述第二安装板32上设有缺口。所述连接舌331与所述缺口插接配合,以使所述连接板33与所述第二安装板32固定连接。
66.本技术提供的消杀防疫机器人100,通过在壳体30内设置第一安装板31及第二安装板32,将壳体30的内部空间进行分割,减小了各器件之间的干扰,并可使其内部的器件布置有序,使壳体30的内部空间得到充分利用,从而减小了消杀防疫机器人100整体体积。
67.实施例三
68.请参阅图1至图6,本实施例提供的一种消杀防疫机器人100,用于对空间进行消毒。本实施例是在上述实施例一或实施例二的技术基础上做出的改进,相比于上述实施例一,区别之处在于:
69.所述消杀防疫机器人100还包括视觉摄像机90。所述视觉摄像机90设置于所述壳体30的顶部。
70.具体的,所述视觉摄像机90包括摄像头91和顶壳92。所述顶壳92设于所述壳体30的上部。所述摄像头91设于所述顶壳92的一侧,且所述摄像头91位于所述第二灯管安装座42的上方。
71.在一些实施例中,请参阅图6及图11,所述顶壳92的底部设置有安装缺口921。所述安装缺口921的数量与所述第二灯管安装座42的数量相对应。
72.每一个所述第二灯管安装座42设置于相应的一个所述安装缺口921内。
73.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
74.尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。