1.本实用新型涉及开发板技术领域,具体涉及一种机器人主板用控制系统及电路。
背景技术:
2.开发板是用来进行嵌入式系统开发的电路板,包括中央处理器、存储器、输入设备、输出设备、数据通路/总线和外部资源接口等一系列硬件组件。使用开发板研发智能人行机器人时,由于人行机器人上包括有大量可自由活动的关节,同时还需在机器人上配备大量传感器,传感器用于检测机器人的活动情况和获取机器人所处环境,为避免连接外设占用过多体积,需要一种开发班上配备大量用于分别连接不同的外设的开发板,避免外接过多拓展接口,以便研发机器人。
技术实现要素:
3.有鉴于此,本实用新型要解决的问题是提供一种机器人主板用控制系统及电路,通过配备有大量与cpu主控模块连接的不同类型的外设接口,使cpu主控模块直接连接大量的驱动外设和ai外设,便于智能机器人的研发。
4.为解决上述技术问题,本实用新型采用的技术方案是:
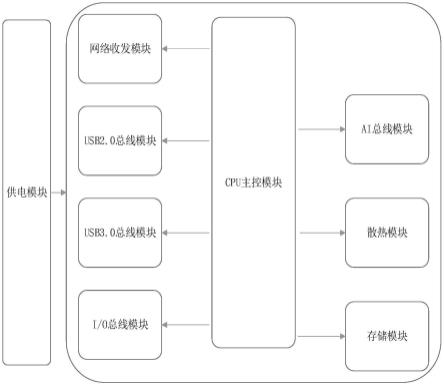
5.一种机器人主板用控制系统及电路,包括有用于给系统供电的供电模块,所述系统包括有用于数据处理并给出反馈的cpu主控模块,所述cpu主控模块连接有用于烧录程序的usb2.0总线模块,用于高速数据传输的usb3.0总线模块,用于与驱动外设数据的互通i/o总线模块,用于与ai外设数据互通的ai总线模块,用于给cpu主控散热的散热模块,用于接收和发送无线数据的网络收发模块,用于此处运行数据的存储模块。
6.进一步的,包括有j1主控芯片,所述主控芯片的sd-emmc端口并接有用于安装sd卡的cn6卡槽和u10存储芯片;
7.所述主控芯片连接有用于控制cn6卡槽或u10存储芯片工作的拨码开关电路。
8.进一步的,所述拨码开关电路包括有一端与j1主控芯片连接的sw3四路拨码开关,另一端接地设置;
9.所述j1主控芯片通过sd_detect端口与cn6卡槽连接,用于控制cn6卡槽内的sd卡是否投入使用,所述j1主控芯片通过emmc_data4端口、emmc_data5端口、emmc_data6端口和emmc_data7端口与u10存储芯片连接,用于控制u10存储芯片是否投入使用。
10.进一步的,所述j1主控芯片通过rgmii端口与u1网卡芯片连接,所述u1网卡芯片连接有cn1网线接口,用于使j1主控芯片可与无线网络数据互通。
11.进一步的,所述cn1网线接口与u1网卡芯片之间包括有若干组用于传输数据的网线,所述网线包括有正极网线和负极网线,所述正极网线和负极网线之间串接有d稳压二极管,用于保证正极网线和负极网线之间电压的稳定。
12.进一步的,所述j1主控芯片型号可为fx10a-144p-sv2。
13.进一步的,所述cn6卡槽的5端口连接有电源,所述cn6卡槽的5端口还连接有d24瞬
态电压抑制器、c55电容和c56电容的一端,另一端接地设置。
14.进一步的,所述供电模块包括有用于提供12v电压的第一供电电路、用以提供5v电压的第二供电电路,用于提供3.8v电压的第三供电电路和用以提供3.3v电压的第四供电电路。
15.进一步的,所述第一供电电路包括有用于与外设电源连接的d12三插头,所述d12三插头的正极导线上依次串接有d35二极管和f3自恢复保险丝,所述f3自恢复保险丝的输出端输出12v电压。
16.本实用新型具有的优点和积极效果是:
17.cpu主控模块通过分别连接usb2.0总线模块、usb3.0总线模块、i/o总线模块、ai总线模块,usb2.0总线模块用于往cpu主控模块内烧录程序或传输数据,usb3.0总线模块用于与外部pc端数据互通,用于高速接收或输出数据,ai总线模块用于连接大量ai外设,获取机器人自身移动情况和机器人所处环境,i/o总线模块用于连接大量驱动外设,cpu主控模块依据ai外设获取的数据控制驱动外设动作,进而控制机器人平稳移动,通过在开发板上配备有大量不同类型的外设接口,以可分别用于连接大量的驱动外设和ai外设,便于智能机器人的研发。
附图说明
18.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
19.图1是本实用新型的一种机器人主板用控制系统的整体结构图;
20.图2是本实用新型的一种主板电路内述j1主控芯片的连接电路图;
21.图3是本实用新型的一种主板电路内cn6卡槽和u10存储芯片的连接电路图;
22.图4是本实用新型的一种主板电路内u10存储芯片的连接电路图;
23.图5是本实用新型的一种主板电路内sw3四路拨码开关的连接电路图;
24.图6是本实用新型的一种主板电路内u1网卡芯片和cn1网线接口的连接电路图;
25.图7是本实用新型的一种主板电路的第一供电电路图;
26.图8是本实用新型的一种主板电路的第二供电电路图。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
29.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领
域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
30.本实用新型提供一种机器人主板用控制系统及电路,如图1所示,包括有cpu主控模块,cpu主控模块连接有usb2.0总线模块,可通过usb2.0总线模块往cpu主控模块内存入运行程序,也可通过usb2.0总线模块将cpu主控模块与pc端连接,用于传输数据。cpu主控模块连接有用于与pc端连接的usb3.0总线模块,usb3.0总线模块将用于高速数据传输。
31.cpu主控模块分别连接有i/o总线模块和ai总线模块,i/o总线模块用于与驱动外设连接,如用于控制机器人关节弯曲的驱动电机;ai总线模块用于与ai外设连接,如用于检测机器人倾斜情况的倾斜仪或距离传感器。cpu主控模块获取ai外设采集的数据,依据ai外设获取的数据控制驱动电机动作,使机器人实现打印的动作。
32.cpu主控模块连接与散热模块,散热模块的输出端连接有散热设备,如散热风扇,用于给主控芯片散热。cpu主控模块连接有网络收发模块,网络收发模块用于接收或发送无线数据。cpu主控模块还连接有存储模块,用于存储机器人运行过程中采集和产生的数据。如在研发测试过程中,机器人没有完成对应的指令,可通过usb3.0总线模块会将cpu主控模块与pc端连接,将存储模块内的数据传输至pc端,通过pc端查看运行时产生的数据,判断机器人下出现故障的原因。
33.如图2至4所示,其开发板的电路包括有j1主控芯片,优选的,j1主控芯片的型号可为fx10a-144p-sv2。j1主控芯片上设置有若干sd-emmc端口,sd-emmc端口用于分别与u10存储芯片和cn6卡槽连接,cn6卡槽内安装用于存储数据的sd卡,由于sd卡的可拆卸性。通过pc端查询数据时,可直接取出sd卡,通过转接头将sd卡安装在pc端上即可查询,可便捷快速的查询机器人的运行数据。
34.cn6卡槽的5端口连接有供电电源,cn6卡槽的5端口还连接有d24瞬态电压抑制器、c55电容和c56电容的一端,另一端接地设置,用于平稳的给cn6卡槽供电。
35.如图5所示,j1主控芯片连接有拨码开关电路,拨码开关电路包括有输入端与j1主控芯片连接的sw3四路拨码开关,sw3四路拨码开关的输出端接地设置,通过拨动sw3四路拨码开关上的四个开关,给j1主控芯片水指令,j1主控芯片依据接收的指令,控制u10存储芯片或sd卡投入使用。
36.j1主控芯片通过sd_detect端口与cn6卡槽连接,用于控制cn6卡槽内的sd卡是否投入使用。j1主控芯片通过emmc_data4端口、emmc_data5端口、emmc_data6端口和emmc_data7端口与u10存储芯片连接,用于控制u10存储芯片是否投入使用。
37.如图6所示,为便于j1主控芯片与无线网络数据互通,j1主控芯片通过rgmii端口与u1网卡芯片,u1网卡芯片连接有cn1网线接口,cn1网线接口可连接无线收发设备,使j1主控芯片接收附近局域网数据。cn1网线接口也可连接英语传输无线数据的网线,使j1主控芯片接收无线数据。
38.cn1网线接口的连接端包括有若干组mdi 端口和mdi-端口,mdi 端口和mdi-端口分别与u1网卡芯片的mdip端口和mdin端口连接,在cn1网线接口与u1网卡芯片之间形成一组用于传输数据的网线,网线包括有正极网线和负极网线,正极网线和负极网线之间串接有d稳压二极管,可保证正极网线和副及网线之间的电压的稳固而性,提高网线的抗干扰能
力。
39.如图7和图8所示,开发板上还增设有用于给系统提供电能的供电模块,由于系统内不同的功能模块使用的电源不完全相同,供电模块包括有用于提供12v电压的第一供电电路、用以提供5v电压的第二供电电路,用于提供3.8v电压的第三供电电路和用以提供3.3v电压的第四供电电路。
40.第一供电电路用于库开发板的外设电源连接,以提供最高的12v电源,如外设电源进而为插座。第一供电电路包括有d12三插头,d12三插头与插座连接,d12三插头每包括有正极导线、负极导线和地线,负极导线和地线均接地设置。正极导线依次串接d35二极管和f3自恢复保险丝后输出12v电压。
41.相同的,d35二极管和f3自恢复保险丝并接有d25瞬态电压抑制器和r236电阻的一端,另一端接地设置,同时第一供电电路的输出端并将有若干滤波电容的一端,另一端均接地设置,用于保证第一供电电路输出电压的稳定性。
42.第二供电电路包括有u22调压芯片,u22调压芯片的输入端与第一供电电路的输出端连接,u22调压芯片将12v电压调压处理后输出5v电压,u22调压芯片的输出端并将有若干用于滤波的电容,用于保证第二供电电路输出电压的稳定性。
43.第三供电电路的结构与第二供电电路相同,第三供电电路的输入端与第一供电电路的输出端连接,用于将12v电压调压处理后输出3.8v的电压,相同的,第三供电电路的输出端并接有若干用于滤波的电容,以保证输出电压的稳定性。
44.第四供电电路的结构与第二供电电路相同,且第四供电电路的输入端与第三供电电路的输出端连接,第四供电电路用于将3.8v的电压转换成3.3的工作电压。
45.本实用新型的工作原理和工作过程如下:
46.开发板测试机器人性能时,使用usb2.0总线模块往j1主控芯片内导入运行程序,机器人各关节处的驱动电机与i/o总线模块数据互通,机器人上固定的ai设备与ai总线模块数据互通。
47.同时在网络收发模块内的cn1网线接口上连接无线设备,用于接收和传输无线数据,将控制机器人动作的运行指令通过u1网卡芯片传输给j1主控芯片,并结合ai设备采集的数据,控制驱动电机动作,使机器人完成相应的功能(实际为机器人完成设定的动作)。
48.在测试之前拨动sw3四路拨码开关,优选使用sd卡,在功能调试阶段,使用sd卡存储数据,方便快速将机器人的运行数据转移到pc端。当功能调试完成后,拨动sw3四路拨码开关,使用u10存储芯片存储数据。
49.以上对本实用新型的实施例进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型范围所作的均等变化与改进等,均应仍归属于本专利涵盖范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。