1.本实用新型属于工程设备技术领域,公开了一种遥控手柄控制装置。
背景技术:
2.现今大多数工程车都从事抢险救灾救火、垃圾清理、高空建筑和化学灾害处理等危险作业,随着无人驾驶遥控技术的普及应用,为了提高工程机械作业的安全性,避免人员伤亡,减少财产损失,而且考虑到无线遥控操作精细、易控且精准,人们开始将无人驾驶遥控技术应用到大型工程机械上面。然而,现今的工程机械的遥控操作手柄设计复杂,大多数都是采用拉臂的驱动方式控制操作杆,安装极为不便,需要特定的安装角度和安装距离。因此只能专机专用,无法很好的配套传统的工程机械,不能很方便地对传统工程机械进行无人驾驶遥控的改造升级。
技术实现要素:
3.本实用新型的目的在于提供一种遥控手柄控制装置,可以灵活的拉动拉动工程设备的操作手柄做前后、左右、360度无死角的动作。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种遥控手柄控制装置,包括:手柄基座、活动连接在所述手柄基座上的控制手柄和用于拉动所述控制手柄的拉线电机,所述控制手柄上栓接固定有拉线环,所述拉线环均匀固定连接有四根拉线,四根所述拉线分别套设在四根拉线套内,四根所述拉线套均匀栓接在所述手柄基座上,四根所述拉线和四根所述拉线套远离所述手柄基座的一端连接在所述拉线电机上,所述拉线电机通过所述拉线控制所述控制手柄的动作。
6.本实用新型进一步设置为,所述拉线环的中心位置开设有贯通的套孔,所述拉线环通过所述套孔套设在所述控制手柄上。
7.本实用新型进一步设置为,所述拉线环上开设有四个穿线孔,四个所述穿线孔均匀设在所述拉线环上,所述穿线孔贯通所述拉线环。
8.本实用新型进一步设置为,所述拉线环外侧壁开设有固定孔,所述固定孔延伸到所述穿线孔内,所述固定孔内栓接有用于压紧所述拉线的压紧螺栓,通过所述压紧螺栓将所述拉线固定连接在所述拉线环上。
9.本实用新型进一步设置为,所述拉线环包括第一拉线环构件、与所述第一拉线环构件栓接的第二拉线环构件和固定螺栓,所述固定螺栓用于栓接所述第一拉线环构件和所述第二拉线环构件,所述第一拉线环构件配合所述第二拉线环构件形成可拆装的圆环结构。
10.本实用新型进一步设置为,所述固定螺栓贯通所述第一拉线环构件并与所述第二拉线环构件栓接。
11.本实用新型进一步设置为,所述拉线套远离所述手柄基座的一端固定连接在所述拉线电机上。
12.本实用新型进一步设置为,所述手柄基座的边缘位置均匀开设有四个贯通的拉线套安装孔,所述拉线套通过所述拉线套安装孔栓接固定在所述手柄基座上。
13.本实用新型进一步设置为,所述手柄基座的边缘位置均匀开设有至少两个用于安装固定所述手柄基座的固定安装孔。
14.综上所述,与现有技术相比,本实用新型具有以下有益效果:一种遥控手柄控制装置,包括:手柄基座、活动连接在所述手柄基座上的控制手柄和用于拉动所述控制手柄的拉线电机,所述控制手柄上栓接固定有拉线环,所述拉线环均匀固定连接有四根拉线,四根所述拉线分别套设在四根拉线套内,四根所述拉线套均匀栓接在所述手柄基座上,四根所述拉线和四根所述拉线套远离所述手柄基座的一端连接在所述拉线电机上,所述拉线电机通过所述拉线控制所述控制手柄的动作。本实用新型设计新颖,结构合理,通过拉线电机拉动四根匀固定连接在拉线环上的拉线,可以灵活的拉动拉动工程设备的操作手柄做前后、左右、360度无死角的动作。
附图说明
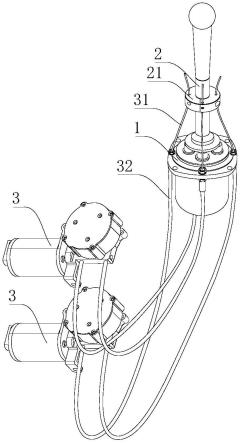
15.图1是本实施例提供的一种遥控手柄控制装置的整体结构示意图;
16.图2是本实施例提供的一种遥控手柄控制装置的手柄基座和控制手柄的结构图;
17.图3是本实施例提供的一种遥控手柄控制装置的手柄基座和控制手柄的结构图;
18.图4是本实施例提供的一种遥控手柄控制装置的手柄基座和控制手柄的剖视图;
19.图5是本实施例提供的一种遥控手柄控制装置的拉线环的结构示意图;
20.图6是本实施例提供的一种遥控手柄控制装置的拉线环的结构示意图;
21.图7是本实施例提供的一种遥控手柄控制装置的拉线环的剖视图。
22.图中:1、手柄基座;11、拉线套安装孔;12、固定安装孔;13、限位球头;2、控制手柄;21、拉线环;211、套孔;212、穿线孔;2121、固定孔;2122、压紧螺栓;213、第一拉线环构件;214、第二拉线环构件;215、固定螺栓;3、拉线电机;31、拉线;32、拉线套。
具体实施方式
23.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明,应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
24.本实用新型提供了如图1-5所示的,一种遥控手柄控制装置,包括:手柄基座1、活动连接在手柄基座1上的控制手柄2和用于拉动控制手柄2的拉线电机3,控制手柄2上栓接固定有拉线环21,拉线环21均匀固定连接有四根拉线31,四根拉线31分别套设在四根拉线套32内,四根拉线套32均匀栓接在手柄基座1上,四根拉线31和四根拉线套32远离手柄基座1的一端连接在拉线电机3上,拉线电机3通过拉线31控制控制手柄2的动作。
25.需要说明的是,现今的工程机械的遥控操作手柄设计复杂,大多数都是采用拉臂的驱动方式控制操作杆,安装极为不便,需要特定的安装角度和安装距离。因此只能专机专用,无法很好的配套传统的工程机械,不能很方便地对传统工程机械进行无人驾驶遥控的改造升级。
26.本实用新型通过拉线电机3拉动四根匀固定连接在拉线环21上的拉线31,可以灵
活的拉动拉动工程设备的操作手柄做前后、左右、360度无死角的动作。
27.其中,四根拉线31均匀固定连接在拉线环21上,四根拉线31分别固定连接在拉线环21的前、后、左、右方向。
28.在一些实施例中,本实用新型可以通过四个拉线电机3拉动拉线31,每个拉线电机3对应控制一根拉线31的伸缩,通过四根拉线31的伸缩来控制工程设备的操作手柄做前后、左右、360度无死角的动作。
29.在一些实施例中,本实用新型可以通过两个拉线电机3交叉配合拉动同一个操作手柄,其中,每个拉线电机3对应控制两根对称设置在拉线环21上的拉线31,一个拉线电机3的拉线31固定连接在拉线环21的x轴方向,用于拉动操作手柄沿x轴方向移动;另一个拉线电机3的拉线31固定连接在拉线环21的y轴方向,用于拉动操作手柄沿y轴方向移动。
30.在这些实施例中,拉线电机3内设有拉线滚轮,拉线滚轮外围设有弧形滑轨,拉线31通过弧形滑轨上套设在拉线滚轮上,对称设置在拉线环21上的拉线31实际上是一条拉线31,拉线31的中间段通过弧形滑轨上套设在拉线滚轮上,拉线31的两端固定连接在拉线环21上的对称位置。当拉线电机3驱动拉线滚轮转动时,拉线31有一端会伸长,拉线31的另一端必然会缩短。通过两个拉线电机3联动操作,通过拉线31使控制手柄2可以在x轴和y轴上做前后、左右、360度无死角的操作。
31.其中,拉线31中间位置设有固定块,拉线滚轮的外围开设有凹槽,固定块与凹槽卡扣连接,以使拉线滚轮拉动离合拉线31伸缩。防止拉线31与拉线滚轮打滑。
32.另外需要说明的是,手柄基座1上设有限位球头13,控制手柄2的底部扣设在限位球头上,通过限位球头13防止控制手柄2脱出,以此使控制手柄2活动连接在手柄基座1上。
33.进一步的,拉线环21的中心位置开设有贯通的套孔211,拉线环21通过套孔211套设在控制手柄2上。
34.进一步的,拉线环21上开设有四个穿线孔212,四个穿线孔212均匀设在拉线环21上,穿线孔212贯通拉线环21。
35.进一步的,拉线环21外侧壁开设有固定孔2121,固定孔2121延伸到穿线孔212内,固定孔2121内栓接有用于压紧拉线31的压紧螺栓2122,通过压紧螺栓2122将拉线31固定连接在拉线环21上。
36.需要说明的是,四根拉线31对应穿过四个穿线孔212,然后通过拧紧严谨螺栓压紧穿线孔212上的拉线31,以此将拉线31固定在拉线环21上。
37.进一步的,拉线环21包括第一拉线环21构件、与第一拉线环21构件栓接的第二拉线环21构件和固定螺栓215,固定螺栓215用于栓接第一拉线环21构件和第二拉线环21构件,第一拉线环21构件配合第二拉线环21构件形成可拆装的圆环结构。
38.需要说明的是,安装设备时将固定螺栓215拧开,将第一拉线环21构件和第二拉线环21构件分开,然后将第一拉线环21构件和第二拉线环21构件套在控制手柄2上,最后通过拧紧固定螺栓215使第一拉线环21构件和第二拉线环21构件重新结合,并且夹紧控制手柄2。
39.进一步的,固定螺栓215贯通第一拉线环21构件并与第二拉线环21构件栓接。
40.进一步的,拉线套32远离手柄基座1的一端固定连接在拉线电机3上。
41.可以理解的是:拉线31的驱动方式非常便于安装,因为拉线套32可以在一定的角
度范围内可以自由弯曲,不需要特定的安装角度和安装空间,只要有用于安装的螺丝位即可。拉线套32的长度不会因为拉线31的伸缩而改变,拉线31相对于拉线套32伸缩移动,以此来拉动工程设备的控制手柄2。
42.进一步的,手柄基座1的边缘位置均匀开设有四个贯通的拉线套32安装孔11,拉线套32通过拉线套32安装孔11栓接固定在手柄基座1上。
43.进一步的,手柄基座1的边缘位置均匀开设有至少两个用于安装固定手柄基座1的固定安装孔12。
44.综上,本实用新型具有以下有益效果:一种遥控手柄控制装置,包括:手柄基座1、活动连接在手柄基座1上的控制手柄2和用于拉动控制手柄2的拉线电机3,控制手柄2上栓接固定有拉线环21,拉线环21均匀固定连接有四根拉线31,四根拉线31分别套设在四根拉线套32內,四根拉线套32均匀栓接在手柄基座1上,四根拉线31和四根拉线套32远离手柄基座1的一端连接在拉线电机3上,拉线电机3通过拉线31控制控制手柄2的动作。本实用新型设计新颖,结构合理,通过拉线电机3拉动四根匀固定连接在拉线环21上的拉线31,可以灵活的拉动拉动工程设备的操作手柄做前后、左右、360度无死角的动作。
45.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本实用新型创造的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。