1.本实用新型涉及水下机械设备领域,具体是指一种水面打捞机器人。
背景技术:
2.水下机器人是一种能够在海底进行探测作业的机器人,主要用于水下施工、公安消防、科研等领域,可搭载液压或电动水下机械手,能进行水下打捞、水下施工、水下抓取、水下采样、水下标记等水下作业,中国专利cn215618134u公开了自由抓取装置,包括支撑架、驱动机构和抱爪机构,所述支撑架和/或抱爪机构上固定设有浮体,所述支撑架和/或抱爪机构上固定设有推进器,所述抱爪机构包括左抱爪组件和右抱爪组件,所述支撑架下端两侧设有左抱爪组件和右抱爪组件,所述左抱爪组件上端与支撑架铰接,所述右抱爪组件上端与支撑架铰接,所述左抱爪组件和右抱爪组件由驱动机构驱动分开或闭合,所述驱动机构包括左电推杆和右电推杆,所述左电推杆上端与支撑架铰接,下端与左抱爪组件铰接,所述右电推杆上端与支撑架铰接,下端与右抱爪组件铰接,所述左抱爪组件和右抱爪组件之间设有锁紧机构,所述锁紧机构可以由锁紧电机、齿轮和齿条组成,所述左抱爪组件下端至少设有一个齿轮,所述齿轮固定在锁紧电机的输出轴上,所述锁紧电机与左抱爪组件或右抱爪组件固定连接,相应地,右抱爪组件或左抱爪组件下端至少设有一个齿条,所述齿条一端与右抱爪组件或左抱爪组件固定连接,另一端朝向齿轮并与齿轮相配合,当左抱爪组件和右抱爪组件闭合时,齿条与齿轮啮合实现左抱爪组件与右抱爪组件的固定连接,上述专利的不足:一是上述专利中的锁紧机构,结合该专利的附图,上述专利中左抱爪组件和右抱爪组件上端和下端分别设置一个锁紧机构,两个锁紧机构由两个锁紧电机驱动,在使用过程中,锁紧电机必须同步驱动,如果一个电机出现问题就容易锁不紧或者打不开,而且采用两个电机,使用成本高;二是上述专利采用左电推杆和右电推杆来驱动左抱爪组件和右抱爪组件张开或闭合,使用两个电推杆,成本高,一旦损坏就需要更换新的电推杆,维修成本也高;三是上述抱爪机构在夹持物体后,当物体较重时,抱爪组件容易产生松动,导致物体夹持不牢,容易掉落;四是上述抱爪机构中左抱爪组件一端或右抱爪组件一端是铰接在支撑架内,这就导致左抱爪组件和右抱爪组件抱合后的宽度是受到支撑架的高度的限制的,对于较长的物体,抱合后的夹持力不够,容易向一侧歪斜或掉落。
技术实现要素:
3.本实用新型的目的是为了解决现有技术不足,提供一种结构简单、使用成本低、夹持力度大、越拉越紧、锁紧后防松、夹持稳定的水面打捞机器人。
4.为实现上述目的,本实用新型所采用的技术方案是:
5.一种水面打捞机器人,包括机架,所述机架上设有驱动机构,所述机架前端设有抱爪机构,所述抱爪机构上设有锁紧机构,所述抱爪机构包括左抱爪组件和右抱爪组件,所述左抱爪组件包括左上夹爪和左下夹爪,所述右抱爪组件包括右上夹爪和右下夹爪,其特征在于:所述锁紧机构包括上齿条、上齿轮、下齿条、下齿轮、齿轮联动轴、锁紧从动齿轮、锁紧
主动齿轮和锁紧电机,所述左上夹爪前端设有上齿条,所述右上夹爪前端设有上齿轮,所述左下夹爪前端设有下齿条,所述右下夹爪前端设有下齿轮,所述上齿条一端与左上夹爪固定连接,另一端朝向右上夹爪延伸,上齿条与上齿轮配合,所述下齿条一端与左下夹爪固定连接,另一端朝向右下夹爪延伸,下齿条与下齿轮配合,所述上齿轮和下齿轮之间设有齿轮联动轴,所述齿轮联动轴上端穿出右上夹爪与上齿轮固定连接,齿轮联动轴下端穿出右下夹爪与下齿轮固定连接,所述齿轮联动轴两端分别经轴承与右上夹爪和右下夹爪固定连接,所述齿轮联动轴上固定设有锁紧从动齿轮,所述锁紧从动齿轮与锁紧主动齿轮啮合,所述锁紧主动齿轮固定在锁紧电机的输出轴上,所述锁紧电机经支架与右上夹爪或右下夹爪固定连接,以利于当左上夹爪和右上夹爪、左下夹爪和右下夹爪闭合时,锁紧电机驱动锁紧主动齿轮旋转,锁紧主动齿轮驱动锁紧从动齿轮进而驱动带轮联动轴旋转,带动上齿轮旋转与上齿条啮合,下齿轮旋转与下齿条啮合。
6.本实用新型所述驱动机构可以由左联动杆、左电动推杆、右联动杆和右电动推杆组成,所述左上夹爪、左下夹爪、右上夹爪和右下夹爪分别与机架铰接,所述左上夹爪和左下夹爪之间设有左联动杆,所述左联动杆上设有左电动推杆,所述左联动杆上端与左上夹爪固定连接,下端与左下夹爪固定连接,所述左电动推杆一端与机架铰接,另一端与左联动杆铰接,所述右上夹爪和右下夹爪之间设有右联动杆,所述右联动杆上设有右电动推杆,所述右联动杆上端与右上夹爪铰接,下端与右下夹爪铰接,所述右电动推杆一端与机架铰接,另一端与右联动杆铰接,以利于通过驱动同步驱动左电动推杆和右电动推杆,实现左上夹爪和右上夹爪、左下夹爪和右下夹爪的分开或闭合。
7.本实用新型所述驱动机构也可以由左连轴、右连轴、左联动杆、左电动推杆、右联动杆和右电动推杆组成,所述机架上间隔设有左连轴和右连轴,所述左连轴和右连轴分别经轴套与机架固定连接,所述左连轴上端与左上夹爪固定连接,下端与左下夹爪固定连接,所述右连轴上端与右上夹爪固定连接,下端与右下夹爪固定连接,所述左上夹爪和左下夹爪之间设有左联动杆,所述左联动杆上设有左电动推杆,所述左联动杆上端与左上夹爪固定连接,下端与左下夹爪固定连接,所述左电动推杆一端与机架铰接,另一端与左联动杆铰接,所述右上夹爪和右下夹爪之间设有右联动杆,所述右联动杆上设有右电动推杆,所述右联动杆上端与右上夹爪铰接,下端与右下夹爪铰接,所述右电动推杆一端与机架铰接,另一端与右联动杆铰接,以利于通过驱动同步驱动左电动推杆和右电动推杆,实现左上夹爪和右上夹爪、左下夹爪和右下夹爪的分开或闭合。
8.本实用新型所述驱动机构还可以由左连轴、右连轴、左齿轮、右齿轮、从动带轮、驱动带轮和驱动电机组成,所述机架上间隔设有左连轴和右连轴,所述左连轴和右连轴分别经轴套与机架固定连接,所述左连轴上端与左上夹爪固定连接,下端与左下夹爪固定连接,所述左连轴上固定设有左齿轮,所述右连轴上端与右上夹爪固定连接,下端与右下夹爪固定连接,所述右连轴上固定设有右齿轮,所述左齿轮与右齿轮啮合,所述左连轴或右连轴上设有从动带轮,所述从动带轮与左连轴或右连轴固定连接,所述从动带轮与驱动带轮经同步带传动连接,所述驱动带轮固定在驱动电机的输出轴上,所述驱动电机固定在机架上,以利于驱动电机带动驱动带轮旋转,进而带动从动带轮旋转,从动带轮带动左连轴或右连轴旋转,左连轴或右连轴通过左齿轮与右齿轮啮合同步带动左上夹爪和右上夹爪、左下夹爪和右下夹爪张开或闭合。
9.本实用新型所述机架上设有拉紧机构,所述拉紧机构包括左铰杆、左连杆、右铰杆、右连杆、销轴和拉杆,所述左连轴上设有左铰杆,所述左连轴左侧设有左连杆,所述右连轴上设有右铰杆,所述右连轴右侧设有右连杆,所述左铰杆和右铰杆交叉设置,所述左铰杆一端与左连轴固定连接,另一端与右连杆前端铰接,所述右铰杆一端与右连轴固定连接,另一端与左连杆前端铰接,所述左连杆后端经销轴与右连杆后端铰接,所述销轴与拉杆一端固定连接,所述拉杆另一端置于机架外形成拉紧端,以利于夹爪夹取物体后,操作人员拉动拉杆,左连杆和右连杆向前移动,带动左铰杆向右转动,右铰杆向左转动,左铰杆带动左连轴向右转动,右铰杆带动右连轴向左转动,使得左上夹爪、左下夹爪向右,右上夹爪、右下夹爪向左,抱合更紧,夹持更加牢固。
10.本实用新型所述机架上设有导向座,所述导向座下端与机架固定连接,所述导向座内设有导向杆孔,所述拉杆一端穿出导向杆孔置于机架外形成拉紧端,以利于通过导向座为拉杆导向。
11.本实用新型所述齿轮联动轴上设有锁紧防松机构,所述锁紧防松机构包括棘轮、棘爪、舵机和安装架,所述齿轮联动轴上设有棘轮,所述棘轮与齿轮联动轴固定连接,所述棘轮一侧设有棘爪,所述棘爪由舵机驱动与棘轮接触或与棘轮分开,所述舵机经安装架与右上夹爪或右下夹爪固定连接,以利于锁紧机构锁紧后,舵机驱动棘爪插入棘轮的齿槽内,使得棘轮只能单向转动,进而使得锁紧不松开。
12.本实用新型所述舵机与棘爪之间设有连杆机构,所述连杆机构包括驱动杆、第一连杆、第二连杆和限位轴,所述舵机的输出轴上设有驱动杆,所述驱动杆与棘爪之间设有第一连杆,所述驱动杆与安装架之间设有第二连杆,所述驱动杆一端与舵机的输出轴固定连接,另一端与第一连杆一端铰接,所述第一连杆另一端设有移动槽,所述棘爪一端与安装架铰接,另一端伸向棘轮并与棘轮相配合,所述棘爪两端之间设有限位轴,所述限位轴上端滑动置于移动槽内,下端与棘爪铰接,所述第二连杆一端与驱动杆铰接,另一端与安装架铰接,以利于舵机的输出轴通过驱动杆带动第一连杆移动,第一连杆驱动棘爪的限位轴在移动槽内移动实现棘爪与棘轮的接触或远离。
13.本实用新型所述机架上端设有上加装架,所述上加装架下端与机架固定连接,左上夹爪后端置于上加装架上与左连轴固定连接,右上夹爪后端置于上加装架上与右连轴固定连接,所述机架下端设有下加装架,所述下加装架上端与机架固定连接,所述左下夹爪后端置于下加装架上与左连轴固定连接,右下夹爪后端置于下加装架上与右连轴固定连接,以利于增加左上夹爪、右上夹爪与左下夹爪、右下夹爪之间的间距,方便很好的夹持住较大的物体。
14.本实用新型所述左上夹爪和左下夹爪之间设有左联动架,左联动架两端与左上夹爪和左下夹爪固定连接,右上夹爪和右下夹爪之间设有右联动架,右联动架两端与右上夹爪和右下夹爪固定连接,以利于左联动架增加左上夹爪和左下夹爪的联动性,右联动架增加右上夹爪和右下夹爪的联动性,同时通过左联动架和右联动架增加抱爪组件的夹持力度。
15.本实用新型所述机架上固定设有浮体和推进器,以利于通过浮体调整整个机架在水下的浮力,通过推进器调整机架在水下的姿态。
16.本实用新型由于采用上述结构,具有结构简单、使用成本低、夹持力度大、越拉越
紧、锁紧后防松、夹持稳定等优点。
附图说明
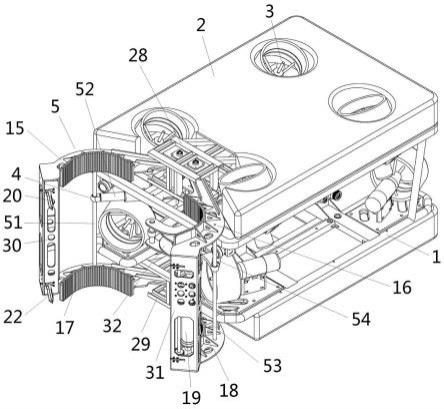
17.图1是本实用新型的一种结构示意图。
18.图2是本实用新型图1中抱爪机构闭合的结构示意图。
19.图3是本实用新型的另一种结构示意图。
20.图4是本实用新型图3中抱爪机构闭合的结构示意图。
21.图5是本实用新型的又一种结构示意图。
22.图6是本实用新型图5中抱爪机构闭合的结构示意图。
23.图7是本实用新型的再一种结构示意图。
24.图8是本实用新型图7中抱爪机构闭合的结构示意图。
25.图9是本实用新型中拉紧机构的结构示意图。
26.图10是本实用新型图9中抱爪机构闭合的结构示意图。
27.图11是本实用新型中部分驱动机构的结构示意图。
28.图12是本实用新型中抱爪机构、驱动机构和拉紧机构的放大示意图。
29.图13是本实用新型中图12的前视图。
30.图14是本实用新型中锁紧防松机构的放大示意图。
31.图15是本实用新型中连杆机构的放大示意图。
32.附图标记:机架1,浮体2,推进器3,驱动机构4,抱爪机构5,左连轴6,右连轴7,左齿轮8,右齿轮9,从动带轮10,驱动带轮11,驱动电机12,左抱爪组件13,右抱爪组件14,左上夹爪15,右上夹爪16,左下夹爪17,右下夹爪18,锁紧机构19,上齿条20,上齿轮21,下齿条22,下齿轮23,齿轮联动轴24,锁紧从动齿轮25,锁紧主动齿轮26,锁紧电机27,上加装架28,下加装架29,左联动架30,右联动架31,拉紧机构32,左铰杆33,左连杆34,右铰杆35,右连杆36,销轴37,拉杆38,导向座39,锁紧防松机构40,棘轮41,棘爪42,舵机43,安装架44,连杆机构45,驱动杆46,第一连杆47,第二连杆48,限位轴49,移动槽50,左联动杆51,左电动推杆52,右联动杆53,右电动推杆54。
具体实施方式
33.下面结合附图,对本实用新型的具体实施方式作进一步详细描述。
34.一种水面打捞机器人,包括机架1,所述机架1上设有驱动机构4,所述机架1前端设有抱爪机构5,所述抱爪机构5上设有锁紧机构19,所述抱爪机构5包括左抱爪组件13和右抱爪组件14,所述左抱爪组件13包括左上夹爪15和左下夹爪17,所述右抱爪组件14包括右上夹爪16和右下夹爪18,其特征在于:所述锁紧机构19包括上齿条20、上齿轮21、下齿条22、下齿轮23、齿轮联动轴24、锁紧从动齿轮25、锁紧主动齿轮26和锁紧电机27,所述左上夹爪15前端设有上齿条20,所述右上夹爪16前端设有上齿轮21,所述左下夹爪17前端设有下齿条22,所述右下夹爪18前端设有下齿轮23,所述上齿条20一端与左上夹爪15固定连接,另一端朝向右上夹爪16延伸,上齿条20与上齿轮21配合,所述下齿条22一端与左下夹爪17固定连接,另一端朝向右下夹爪18延伸,下齿条22与下齿轮23配合,所述上齿轮21和下齿轮23之间设有齿轮联动轴24,所述齿轮联动轴24上端穿出右上夹爪16与上齿轮21固定连接,齿轮联
动轴24下端穿出右下夹爪18与下齿轮23固定连接,所述齿轮联动轴24两端分别经轴承与右上夹爪16和右下夹爪18固定连接,所述齿轮联动轴24上固定设有锁紧从动齿轮25,所述锁紧从动齿轮25与锁紧主动齿轮26啮合,所述锁紧主动齿轮26固定在锁紧电机27的输出轴上,所述锁紧电机27经支架与右上夹爪16或右下夹爪18固定连接,以利于当左上夹爪和右上夹爪、左下夹爪和右下夹爪闭合时,锁紧电机驱动锁紧主动齿轮旋转,锁紧主动齿轮驱动锁紧从动齿轮进而驱动带轮联动轴旋转,带动上齿轮旋转与上齿条啮合,下齿轮旋转与下齿条啮合。
35.本实用新型所述驱动机构4可以由左联动杆51、左电动推杆52、右联动杆53和右电动推杆54组成,所述左上夹爪15、左下夹爪17、右上夹爪16和右下夹爪18分别与机架1铰接,所述左上夹爪15和左下夹爪17之间设有左联动杆51,所述左联动杆51上设有左电动推杆52,所述左联动杆51上端与左上夹爪15固定连接,下端与左下夹爪17固定连接,所述左电动推杆52一端与机架1铰接,另一端与左联动杆51铰接,所述右上夹爪16和右下夹爪18之间设有右联动杆53,所述右联动杆53上设有右电动推杆54,所述右联动杆53上端与右上夹爪16铰接,下端与右下夹爪18铰接,所述右电动推杆54一端与机架1铰接,另一端与右联动杆53铰接,以利于通过驱动同步驱动左电动推杆和右电动推杆,实现左上夹爪和右上夹爪、左下夹爪和右下夹爪的分开或闭合。
36.本实用新型所述驱动机构4也可以由左连轴6、右连轴7、左联动杆51、左电动推杆52、右联动杆53和右电动推杆54组成,所述机架1上间隔设有左连轴6和右连轴7,所述左连轴6和右连轴7分别经轴套与机架1固定连接,所述左连轴6上端与左上夹爪15固定连接,下端与左下夹爪17固定连接,所述右连轴7上端与右上夹爪16固定连接,下端与右下夹爪18固定连接,所述左上夹爪15和左下夹爪17之间设有左联动杆51,所述左联动杆51上设有左电动推杆52,所述左联动杆51上端与左上夹爪15固定连接,下端与左下夹爪17固定连接,所述左电动推杆52一端与机架1铰接,另一端与左联动杆51铰接,所述右上夹爪16和右下夹爪18之间设有右联动杆53,所述右联动杆53上设有右电动推杆54,所述右联动杆53上端与右上夹爪16铰接,下端与右下夹爪18铰接,所述右电动推杆54一端与机架1铰接,另一端与右联动杆53铰接,以利于通过驱动同步驱动左电动推杆和右电动推杆,实现左上夹爪和右上夹爪、左下夹爪和右下夹爪的分开或闭合。
37.本实用新型所述驱动机构4还可以由左连轴6、右连轴7、左齿轮8、右齿轮9、从动带轮10、驱动带轮11和驱动电机12组成,所述机架1上间隔设有左连轴6和右连轴7,所述左连轴6和右连轴7分别经轴套与机架1固定连接,所述左连轴6上端与左上夹爪15固定连接,下端与左下夹爪17固定连接,所述左连轴6上固定设有左齿轮8,所述右连轴7上端与右上夹爪16固定连接,下端与右下夹爪18固定连接,所述右连轴7上固定设有右齿轮9,所述左齿轮8与右齿轮9啮合,所述左连轴6或右连轴7上设有从动带轮10,所述从动带轮10与左连轴6或右连轴7固定连接,所述从动带轮10与驱动带轮11经同步带传动连接,所述驱动带轮11固定在驱动电机12的输出轴上,所述驱动电机12固定在机架1上,以利于驱动电机带动驱动带轮旋转,进而带动从动带轮旋转,从动带轮带动左连轴或右连轴旋转,左连轴或右连轴通过左齿轮与右齿轮啮合同步带动左上夹爪和右上夹爪、左下夹爪和右下夹爪张开或闭合。
38.本实用新型所述机架1上设有拉紧机构32,所述拉紧机构32包括左铰杆33、左连杆34、右铰杆35、右连杆36、销轴37和拉杆38,所述左连轴6上设有左铰杆33,所述左连轴6左侧
设有左连杆34,所述右连轴7上设有右铰杆35,所述右连轴7右侧设有右连杆36,所述左铰杆33和右铰杆35交叉设置,所述左铰杆33一端与左连轴6固定连接,另一端与右连杆36前端铰接,所述右铰杆35一端与右连轴7固定连接,另一端与左连杆34前端铰接,所述左连杆34后端经销轴37与右连杆36后端铰接,所述销轴37与拉杆38一端固定连接,所述拉杆38另一端置于机架1外形成拉紧端,以利于夹爪夹取物体后,操作人员拉动拉杆,左连杆和右连杆向前移动,带动左铰杆向右转动,右铰杆向左转动,左铰杆带动左连轴向右转动,右铰杆带动右连轴向左转动,使得左上夹爪、左下夹爪向右,右上夹爪、右下夹爪向左,抱合更紧,夹持更加牢固。
39.本实用新型所述机架1上设有导向座39,所述导向座39下端与机架1固定连接,所述导向座39内设有导向杆孔,所述拉杆38一端穿出导向杆孔置于机架1外形成拉紧端,以利于通过导向座为拉杆导向。
40.本实用新型所述齿轮联动轴24上设有锁紧防松机构40,所述锁紧防松机构40包括棘轮41、棘爪42、舵机43和安装架44,所述齿轮联动轴24上设有棘轮41,所述棘轮41与齿轮联动轴24固定连接,所述棘轮41一侧设有棘爪42,所述棘爪42由舵机43驱动与棘轮41接触或与棘轮41分开,所述舵机43经安装架44与右上夹爪16或右下夹爪18固定连接,以利于锁紧机构锁紧后,舵机驱动棘爪插入棘轮的齿槽内,使得棘轮只能单向转动,进而使得锁紧不松开。
41.本实用新型所述舵机43与棘爪42之间设有连杆机构45,所述连杆机构45包括驱动杆46、第一连杆47、第二连杆48和限位轴49,所述舵机43的输出轴上设有驱动杆46,所述驱动杆46与棘爪42之间设有第一连杆47,所述驱动杆46与安装架44之间设有第二连杆48,所述驱动杆46一端与舵机43的输出轴固定连接,另一端与第一连杆47一端铰接,所述第一连杆47另一端设有移动槽50,所述棘爪42一端与安装架44铰接,另一端伸向棘轮41并与棘轮41相配合,所述棘爪42两端之间设有限位轴49,所述限位轴49上端滑动置于移动槽50内,下端与棘爪42铰接,所述第二连杆48一端与驱动杆46铰接,另一端与安装架44铰接,以利于舵机的输出轴通过驱动杆带动第一连杆移动,第一连杆驱动棘爪的限位轴在移动槽内移动实现棘爪与棘轮的接触或远离。
42.本实用新型所述机架1上端设有上加装架28,所述上加装架28下端与机架1固定连接,左上夹爪15后端置于上加装架28上与左连轴6固定连接,右上夹爪16后端置于上加装架28上与右连轴7固定连接,所述机架1下端设有下加装架29,所述下加装架29上端与机架1固定连接,所述左下夹爪17后端置于下加装架29上与左连轴6固定连接,右下夹爪18后端置于下加装架29上与右连轴7固定连接,以利于增加左上夹爪、右上夹爪与左下夹爪、右下夹爪之间的间距,方便很好的夹持住较大的物体。
43.本实用新型所述左上夹爪15和左下夹爪17之间设有左联动架30,左联动架30两端与左上夹爪15和左下夹爪17固定连接,右上夹爪16和右下夹爪18之间设有右联动架31,右联动架31两端与右上夹爪16和右下夹爪18固定连接,以利于左联动架增加左上夹爪和左下夹爪的联动性,右联动架增加右上夹爪和右下夹爪的联动性,同时通过左联动架和右联动架增加抱爪组件的夹持力度。
44.本实用新型所述机架1上固定设有浮体2和推进器3,以利于通过浮体调整整个机架在水下的浮力,通过推进器调整机架在水下的姿态。
45.如附图1-附图15,本实用新型机架上可设置控制系统,通过线缆与水上控制平台连接,左电动推杆、右电动推杆、推进器、驱动电机、锁紧电机、舵机分别与控制系统连接,本实用新型根据机架与抱爪机构的位置给出了两种实施例附图,一种如附图1、附图2、附图5和附图6所示,机架横向设置,抱爪机构竖向设置;另一种如附图3、附图4、附图7和附图8所示,机架竖向设置,抱爪机构竖向设置;两种方式根据实际工况选择即可,本实用新型中驱动机构有三种,第一种与现有技术类似,左上夹爪后端、左下夹爪后端、右上夹爪后端和右下夹爪后端分别与机架铰接,左上夹爪、左下夹爪经左联动杆由左电动推杆驱动,右上夹爪、右下夹爪经右联动杆由右电动推杆驱动;第二种如附图1-附图4,左上夹爪、左下夹爪分别固定在左连轴上下端,左连轴经轴套与机架连接,右上夹爪、右下夹爪分别固定在右连轴上下端,右连轴经轴套与机架连接,左上夹爪、左下夹爪经左联动杆由左电动推杆驱动,右上夹爪、右下夹爪经右联动杆由右电动推杆驱动;第三种如附图5-附图8,左上夹爪、左下夹爪分别固定在左连轴上下端,左连轴经轴套与机架连接,右上夹爪、右下夹爪分别固定在右连轴上下端,右连轴经轴套与机架连接,左上夹爪、左下夹爪和右上夹爪、右下夹爪由驱动电机驱动,驱动电机带动驱动带轮旋转,通过齿轮啮合带动从动带轮旋转,从动带轮带动左连轴或右连轴旋转,左连轴或右连轴通过左齿轮与右齿轮啮合同步带动左上夹爪和右上夹爪、左下夹爪和右下夹爪闭合,这种方式相比第一种和第二种来说,只需要一个驱动电机,使用成本较低,本实用新型中第一种驱动方式和第二种驱动方式上均可设置拉紧机构,拉紧机构的拉杆上可固定设置连接头,方便限位拉杆的位置,连接头的外径大于导向座的导向杆孔,同时通过连接头可连接拉绳,操作人员可通过拉绳控制拉杆进而在抓取物体后实现越拉越紧的效果,为方便说明,以图1的方位来简要描述,使用时,可通过船只将本实用新型运输到作业海域,放入指定位置,本实用新型可通过推进器调整在水中的姿势和位置,通过推进器驱动机架移动抓取水中的物体,本实用新型的初始状态下,机架左侧的左上夹爪和左下夹爪与机架右侧的右上夹爪和右下夹爪是分开的,锁紧机构中上齿条、上齿轮以及下齿条、下齿轮也是分开的,拉紧机构也是未拉动状态,如附图1、附图3、附图5、附图7、附图9、附图11和附图12所示,当需要抓取物体时,通过推进器移动到物体附近,然后通过推进器调整抱爪机构与物体的相对位置,使得物体进入机架左侧的左上夹爪、左下夹爪与机架右侧的右上夹爪、右下夹爪之间,然后启动驱动机构,将物体夹持住,与此同时,启动锁紧电机和舵机,锁紧电机驱动锁紧主动齿轮旋转,锁紧主动齿轮驱动锁紧从动齿轮旋转,进而驱动带轮联动轴旋转,带动上齿轮旋转与上齿条啮合,下齿轮旋转与下齿条啮合,从而将物体紧紧夹持在左上夹爪和右上夹爪、左下夹爪和右下夹爪之间,舵机驱动连杆机构使得棘爪靠近棘轮并插入棘轮的齿槽内,如附图14和附图15所示,使得棘轮只能单向转动,即顺着齿轮齿条啮合的方向旋转,不能反向旋转,还可以同时拉动拉绳,如图10所示,使得拉杆上移,进而带动左连杆和右连杆向上移动,带动左铰杆向右转动,右铰杆向左转动,左铰杆带动左连轴向右转动,右铰杆带动右连轴向左转动,使得左上夹爪、左下夹爪向右,右上夹爪、右下夹爪向左,抱合更紧,夹持更加牢固,最后将机架和夹爪的物体一起拉回船上后,松开拉绳,启动舵机,棘爪与棘轮分开,棘轮可自由转动,启动锁紧电机,同时启动驱动电机,齿轮齿条分开的同时,机架左右两侧的夹爪分开,将物体放下,然后在将本实用新型放入海中,继续抓取下一个物体,本实用新型结构简单,操作方便,可以实现越拉越紧的效果,还设置了锁紧防松机构,夹持牢固,物体不易滑落,此外,本实用新型中锁紧机构中上齿轮和下齿轮只需
一个电机即可实现同步锁紧或打开,本实用新型中驱动机构也可以只用一个电机即可同步驱动,本实用新型使用成本和维修成本大大降低,而且本实用新型机架上下增设了上加装架和下加装架,左上夹爪和左下夹爪设在上加装架上,左下夹爪和右下夹爪设在下加装架上,这大大拓宽了左上夹爪和左下夹爪之间的间距,右上夹爪和右下夹爪之间的间距,对于较长的物体也能夹持的很稳定,不掉落。
46.本实用新型由于采用上述结构,具有结构简单、使用成本低、夹持力度大、越拉越紧、锁紧后防松、夹持稳定等优点。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。