技术特征:
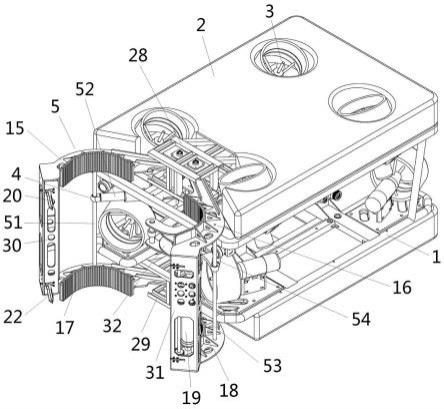
1.一种水面打捞机器人,包括机架(1),所述机架(1)上设有驱动机构(4),所述机架(1)前端设有抱爪机构(5),所述抱爪机构(5)上设有锁紧机构(19),所述抱爪机构(5)包括左抱爪组件(13)和右抱爪组件(14),所述左抱爪组件(13)包括左上夹爪(15)和左下夹爪(17),所述右抱爪组件(14)包括右上夹爪(16)和右下夹爪(18),其特征在于:所述锁紧机构(19)包括上齿条(20)、上齿轮(21)、下齿条(22)、下齿轮(23)、齿轮联动轴(24)、锁紧从动齿轮(25)、锁紧主动齿轮(26)和锁紧电机(27),所述左上夹爪(15)前端设有上齿条(20),所述右上夹爪(16)前端设有上齿轮(21),所述左下夹爪(17)前端设有下齿条(22),所述右下夹爪(18)前端设有下齿轮(23),所述上齿条(20)一端与左上夹爪(15)固定连接,另一端朝向右上夹爪(16)延伸,上齿条(20)与上齿轮(21)配合,所述下齿条(22)一端与左下夹爪(17)固定连接,另一端朝向右下夹爪(18)延伸,下齿条(22)与下齿轮(23)配合,所述上齿轮(21)和下齿轮(23)之间设有齿轮联动轴(24),所述齿轮联动轴(24)上端穿出右上夹爪(16)与上齿轮(21)固定连接,齿轮联动轴(24)下端穿出右下夹爪(18)与下齿轮(23)固定连接,所述齿轮联动轴(24)两端分别经轴承与右上夹爪(16)和右下夹爪(18)固定连接,所述齿轮联动轴(24)上固定设有锁紧从动齿轮(25),所述锁紧从动齿轮(25)与锁紧主动齿轮(26)啮合,所述锁紧主动齿轮(26)固定在锁紧电机(27)的输出轴上,所述锁紧电机(27)经支架与右上夹爪(16)或右下夹爪(18)固定连接。2.根据权利要求1所述的一种水面打捞机器人,其特征在于:所述驱动机构(4)由左联动杆(51)、左电动推杆(52)、右联动杆(53)和右电动推杆(54)组成,所述左上夹爪(15)、左下夹爪(17)、右上夹爪(16)和右下夹爪(18)分别与机架(1)铰接,所述左上夹爪(15)和左下夹爪(17)之间设有左联动杆(51),所述左联动杆(51)上设有左电动推杆(52),所述左联动杆(51)上端与左上夹爪(15)固定连接,下端与左下夹爪(17)固定连接,所述左电动推杆(52)一端与机架(1)铰接,另一端与左联动杆(51)铰接,所述右上夹爪(16)和右下夹爪(18)之间设有右联动杆(53),所述右联动杆(53)上设有右电动推杆(54),所述右联动杆(53)上端与右上夹爪(16)铰接,下端与右下夹爪(18)铰接,所述右电动推杆(54)一端与机架(1)铰接,另一端与右联动杆(53)铰接。3.根据权利要求1所述的一种水面打捞机器人,其特征在于:所述驱动机构(4)由左连轴(6)、右连轴(7)、左联动杆(51)、左电动推杆(52)、右联动杆(53)和右电动推杆(54)组成,所述机架(1)上间隔设有左连轴(6)和右连轴(7),所述左连轴(6)和右连轴(7)分别经轴套与机架(1)固定连接,所述左连轴(6)上端与左上夹爪(15)固定连接,下端与左下夹爪(17)固定连接,所述右连轴(7)上端与右上夹爪(16)固定连接,下端与右下夹爪(18)固定连接,所述左上夹爪(15)和左下夹爪(17)之间设有左联动杆(51),所述左联动杆(51)上设有左电动推杆(52),所述左联动杆(51)上端与左上夹爪(15)固定连接,下端与左下夹爪(17)固定连接,所述左电动推杆(52)一端与机架(1)铰接,另一端与左联动杆(51)铰接,所述右上夹爪(16)和右下夹爪(18)之间设有右联动杆(53),所述右联动杆(53)上设有右电动推杆(54),所述右联动杆(53)上端与右上夹爪(16)铰接,下端与右下夹爪(18)铰接,所述右电动推杆(54)一端与机架(1)铰接,另一端与右联动杆(53)铰接。4.根据权利要求1所述的一种水面打捞机器人,其特征在于:所述驱动机构(4)由左连轴(6)、右连轴(7)、左齿轮(8)、右齿轮(9)、从动带轮(10)、驱动带轮(11)和驱动电机(12)组成,所述机架(1)上间隔设有左连轴(6)和右连轴(7),所述左连轴(6)和右连轴(7)分别经轴
套与机架(1)固定连接,所述左连轴(6)上端与左上夹爪(15)固定连接,下端与左下夹爪(17)固定连接,所述左连轴(6)上固定设有左齿轮(8),所述右连轴(7)上端与右上夹爪(16)固定连接,下端与右下夹爪(18)固定连接,所述右连轴(7)上固定设有右齿轮(9),所述左齿轮(8)与右齿轮(9)啮合,所述左连轴(6)或右连轴(7)上设有从动带轮(10),所述从动带轮(10)与左连轴(6)或右连轴(7)固定连接,所述从动带轮(10)与驱动带轮(11)经同步带传动连接,所述驱动带轮(11)固定在驱动电机(12)的输出轴上,所述驱动电机(12)固定在机架(1)上。5.根据权利要求3或4所述的一种水面打捞机器人,其特征在于:所述机架(1)上设有拉紧机构(32),所述拉紧机构(32)包括左铰杆(33)、左连杆(34)、右铰杆(35)、右连杆(36)、销轴(37)和拉杆(38),所述左连轴(6)上设有左铰杆(33),所述左连轴(6)左侧设有左连杆(34),所述右连轴(7)上设有右铰杆(35),所述右连轴(7)右侧设有右连杆(36),所述左铰杆(33)和右铰杆(35)交叉设置,所述左铰杆(33)一端与左连轴(6)固定连接,另一端与右连杆(36)前端铰接,所述右铰杆(35)一端与右连轴(7)固定连接,另一端与左连杆(34)前端铰接,所述左连杆(34)后端经销轴(37)与右连杆(36)后端铰接,所述销轴(37)与拉杆(38)一端固定连接,所述拉杆(38)另一端置于机架(1)外形成拉紧端。6.根据权利要求5所述的一种水面打捞机器人,其特征在于:所述机架(1)上设有导向座(39),所述导向座(39)下端与机架(1)固定连接,所述导向座(39)内设有导向杆孔,所述拉杆(38)一端穿出导向杆孔置于机架(1)外形成拉紧端。7.根据权利要求1或2或3或4或6所述的一种水面打捞机器人,其特征在于:所述齿轮联动轴(24)上设有锁紧防松机构(40),所述锁紧防松机构(40)包括棘轮(41)、棘爪(42)、舵机(43)和安装架(44),所述齿轮联动轴(24)上设有棘轮(41),所述棘轮(41)与齿轮联动轴(24)固定连接,所述棘轮(41)一侧设有棘爪(42),所述棘爪(42)由舵机(43)驱动与棘轮(41)接触或与棘轮(41)分开,所述舵机(43)经安装架(44)与右上夹爪(16)或右下夹爪(18)固定连接。8.根据权利要求7所述的一种水面打捞机器人,其特征在于:所述舵机(43)与棘爪(42)之间设有连杆机构(45),所述连杆机构(45)包括驱动杆(46)、第一连杆(47)、第二连杆(48)和限位轴(49),所述舵机(43)的输出轴上设有驱动杆(46),所述驱动杆(46)与棘爪(42)之间设有第一连杆(47),所述驱动杆(46)与安装架(44)之间设有第二连杆(48),所述驱动杆(46)一端与舵机(43)的输出轴固定连接,另一端与第一连杆(47)一端铰接,所述第一连杆(47)另一端设有移动槽(50),所述棘爪(42)一端与安装架(44)铰接,另一端伸向棘轮(41)并与棘轮(41)相配合,所述棘爪(42)两端之间设有限位轴(49),所述限位轴(49)上端滑动置于移动槽(50)内,下端与棘爪(42)铰接,所述第二连杆(48)一端与驱动杆(46)铰接,另一端与安装架(44)铰接。9.根据权利要求1或2或3或4或6或8所述的一种水面打捞机器人,其特征在于:所述机架(1)上端设有上加装架(28),所述上加装架(28)下端与机架(1)固定连接,左上夹爪(15)后端置于上加装架(28)上与左连轴(6)固定连接,右上夹爪(16)后端置于上加装架(28)上与右连轴(7)固定连接,所述机架(1)下端设有下加装架(29),所述下加装架(29)上端与机架(1)固定连接,所述左下夹爪(17)后端置于下加装架(29)上与左连轴(6)固定连接,右下夹爪(18)后端置于下加装架(29)上与右连轴(7)固定连接。
10.根据权利要求1或2或3或4或6或8所述的一种水面打捞机器人,其特征在于:所述左上夹爪(15)和左下夹爪(17)之间设有左联动架(30),左联动架(30)两端与左上夹爪(15)和左下夹爪(17)固定连接,右上夹爪(16)和右下夹爪(18)之间设有右联动架(31),右联动架(31)两端与右上夹爪(16)和右下夹爪(18)固定连接。11.根据权利要求1或2或3或4或6或8所述的一种水面打捞机器人,其特征在于:所述机架(1)上固定设有浮体(2)和推进器(3)。
技术总结
本实用新型涉及水下机械设备领域,具体是指一种水面打捞机器人,包括机架,机架上设有驱动机构和抱爪机构,抱爪机构上设有锁紧机构,抱爪机构包括左抱爪组件和右抱爪组件,左抱爪组件包括左上夹爪和左下夹爪,右抱爪组件包括右上夹爪和右下夹爪,锁紧机构包括上齿条、上齿轮、下齿条、下齿轮、齿轮联动轴、锁紧从动齿轮、锁紧主动齿轮和锁紧电机,驱动机构由左联动杆、左电动推杆、右联动杆和右电动推杆组成,或由左连轴、右连轴、左联动杆、左电动推杆、右联动杆和右电动推杆组成,或由左连轴、右连轴、左齿轮、右齿轮、从动带轮、驱动带轮和驱动电机组成,机架上设有拉紧机构,齿轮联动轴上设有锁紧防松机构,本实用新型夹持力度大、越拉越紧。越拉越紧。越拉越紧。
技术研发人员:杜阳 冷建兴 刘砚峰 马健 张鹏勇 姜涛
受保护的技术使用者:山东未来机器人有限公司
技术研发日:2022.05.10
技术公布日:2022/9/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。