1.本发明涉及灭火装置技术领域,具体涉及智能消防水炮可靠性定位灭火算法。
背景技术:
2.自动跟踪灭火装置也称智能消防水炮,是指能通过定位探测技术,自动定位火源、精确定点灭火的消防设备。自动跟踪火源的方法,首先是获取分析火焰辐射的紫外信号,接着装置进行xy平面扫描捕捉火焰辐射的红外信号,然后输出报警信号给联动柜主机启动水泵、开启阀门喷水灭火。大空间自动跟踪灭火须满足《自动喷水灭火系统设计规范》(gb50084-2017)规定的净空高度大于8米的民用和工业建筑,同时也满足国家标准《自动跟踪定位射流灭火系统》(gb 25204-2010)要求,这样就要求灭火装置进行现场调试校准达到消灭火灾、保护人民财产的要求,特别是在体育馆、会展中心、飞机场、火车站、停车场、商场、剧院、厂房、仓库等大型大空间建筑中,灭火装置的调试校准存在较高的难度。
3.现有技术在一般情况下,在xy平面定位时,采用单一的补偿值进行校准,但是由于生产装配、现场施工工艺影响,装置采用单一补偿值在近距离时候可以对准火源,但是远距离时候会出现偏差;同时,定位准确度还受火堆大小的影响。单一补偿的具体方法:灭火装置自动跟踪火堆时,一般采用xy机械狭缝空间定位法,首先寻找到火堆的x坐标,x平面执行了一个固定补偿之后,再继续寻找到火堆的y坐标,根据执行y坐标的时间,采用区间分割方法,给予y平面的补偿。x平面上由于采用单一固定补偿,如果火堆大小不同,距离不同,会造成定位不准;y平面由于采用区间固定值补偿,当定位在两个区间中间的时候,可能出现跳区现象。因此自动跟踪灭火装置在出厂调试,以及工地现场校准调试时,不断反复试水,才能满足要求,但仍然难以适应不同火灾场景的变化。
技术实现要素:
4.为解决上述背景技术中存在的问题,本发明采用自主创新的方法,提供一种智能消防水炮可靠性定位灭火算法,根据火堆不同大小、定位空间远近、装置不同坐标等多参数不同权重进行补偿校准,实现灭火喷水角度的可靠定位。本发明的技术方案如下:智能消防水炮可靠性定位算法,在水平面定位水流喷射的方向角度,在垂直面定位水流喷射时炮管的抬起角度,包括如下步骤:步骤1,水炮在水平面逆时针旋转扫描,水平探测组件扫描到火堆左侧边缘b1点时,水平探测组件反馈回来火灾信号,此时记录水平面旋转角度∠b1;步骤2,水炮继续在水平面逆时针扫描,水平探测组件持续反馈回来火灾信号,到达火堆右侧边缘b2点时,水平探测组件火灾信号消失,此时记录水平面旋转角度∠b2;步骤3,计算水炮从b2点返回火堆根部水平面中心点角度:∠α=(∠b2-∠b1)
÷
2,水炮朝原扫描方向相反的方向即顺时针旋转α度,喷水炮管在水平面正对火堆中间;步骤4,水炮在垂直面从垂直与地面开始向上扫描,垂直探测组件扫描到火堆垂直面根部c点时,垂直探测组件反馈回来火灾信号,此时记录垂直面的旋转角度∠q1,可以计
算出:射水半径l= h
×
tan(q1);步骤5,水流需要上扬一定角度才能使落水点才能到达c点,综合重力加速度、韦达定理计算出射水仰角,水炮继续垂直面向上旋转一个角度达到射水仰角。
5.进一步地,步骤3中计算水炮的水平面返回角度,还需要考虑水平火灾信号强度系数,计算水炮从b2点返回火堆根部水平面中心点角度:∠α= k1×
(∠b2-∠b1)
ꢀ÷
2,式中k1为水平火灾信号强度系数;水炮水平面顺时针旋转α度,喷水炮管水平面正对火堆中间。水平火灾信号强度系数的取值,通过消防水炮对不同强度火灾采集信号的测试来确定。
6.具体来说,步骤5中,综合重力加速度、韦达定理得到射水曲线公式
①
,计算出射水仰角:
①ꢀ
(((g/2)
ꢀ×
l2)
÷v2
)-h)
ꢀ×
(tanq)2 l
×
tanq (g/2)
×
l2)
÷v2
=0;式中:q——射水仰角;v——水炮水嘴出水速度;h——水炮安装高度;g——重力加速度;l——射水半径;计算出垂直面的补偿角度∠β=∠q-∠q1;水炮继续在垂直面向上旋转β度作为射水曲线补偿。
7.进一步地,考虑不同燃烧介质带来火苗抖动摇摆弧长不同的因素,本发明提供的智能消防水炮可靠性定位灭火算法还包括步骤6:根据火苗抖动摇摆弧长lx、不同的定位投影半径l,计算水平面的二次补偿角:α1=lx
×
360
÷
(2
×
π
×
l);式中:l——射水半径;lx——火苗抖动摇摆弧长(图3中c
1-c距离);水炮继续在水平面顺时针旋转α1度后,定位完成。
8.需要说明的是,水炮启动时如果在水平面旋转为顺时针方向,相应调整后续步骤的方向,同样能完成定位并达到相同的效果。即:步骤1中水炮在水平面顺时针旋转扫描,先扫描b2点并记录水平面旋转角度;步骤2中水炮继续在水平面顺时针扫描,扫描到b1点并记录水平面旋转角度;步骤3中,水炮在水平面逆时针旋转α度对准火堆中间;步骤6中,水炮继续在水平面逆时针旋转α1度后,定位完成。
9.本发明的技术效果为:1、本发明提供的智能消防水炮定位算法,改变采用单一固定补偿的方式,而是根据探测组件实时反馈火灾信号,对水炮水平面和垂直面的角度进行动态的调整,更加能够适应火灾现场的情况;2、本发明提供的智能消防水炮定位算法设计了先扫描获得数据,在返回一定角度定位的步骤,各个步骤形成闭环,能够适应各种情况进行准确定位;3、本发明提供的智能消防水炮定位算法,考虑了不同安装高度、不同管道压力的情况,考虑了火堆大小、燃烧介质带来的火苗抖动摇摆等多种因素影响下的精确定位,可靠性高。
附图说明
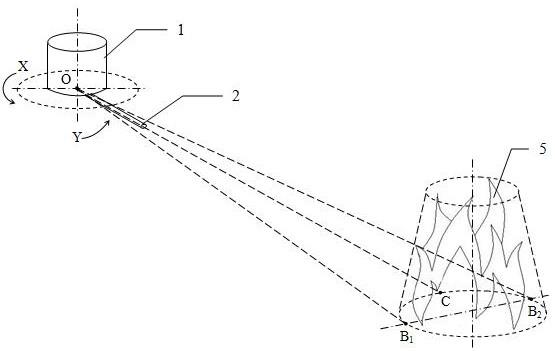
10.图1为本发明涉及的智能消防水炮结构示意图;图2为智能消防水炮可靠性定位灭火算法的立体模型;图3为智能消防水炮可靠性定位灭火算法水平面定位模型;图4为智能消防水炮可靠性定位灭火算法垂直面定位模型;图5为智能消防水炮可靠性定位灭火算法水平面在考虑火苗抖动摇摆因素下的定位模型。
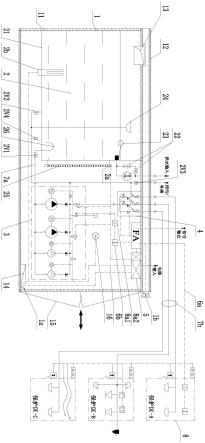
11.图中标注说明:1、智能消防水炮主体;2、喷水炮管;3、主轴;4、喷水管槽;5、火堆。
具体实施方式
12.下面将结合附图,对本发明的技术方案进行清楚、完整地描述。
13.如图1所示,智能消防水炮包括智能消防水炮主体1和喷水炮管2,所述智能消防水炮主体1中轴线上设有主轴3,侧面设有喷水管槽4,所述主轴3垂直与地面,所述喷水炮管2的根部与主轴线相交。所述智能消防水炮主体1连同喷水炮管2以主轴为中心旋转,以便进行水平面定位;水平面已定位后,所述喷水炮管沿所述喷水管槽4绕其根部旋转,以便进行垂直面定位。智能消防水炮设有水平探测组件、垂直探测组件及mcu模块,通过水平、垂直面的定位,最终确定喷水炮管喷水的方向。以上为现有技术。本发明提供的方法,是解决智能消防水炮可靠性定位算法的问题。
14.如图2所示,为智能消防水炮定位灭火的立体模型,左上角为抽象化的智能消防水炮,右下角为需定位进行灭火的火堆5,将火堆5抽象化为一个梯形圆锥体。智能消防水炮主体1连同喷水炮管2绕主轴逆时针旋转,为水平面定位,水平面记为x平面,即寻找火堆5两侧边缘点b1和b2,并定位火堆面向消防水炮的底部中心点c;喷水炮管2绕其根部向上旋转抬起,为垂直面定位,垂直面记为y平面,即确定喷水炮管最佳的喷水角度。由于智能消防水炮有一定的安装高度,水平探测器指向火堆方向是倾斜的,所述x平面即o、b1和b2三点所在的平面与地面有一定倾斜。y平面是x平面定位后,垂直于地面的平面。
15.智能消防水炮安装高度为h(见图4标注),本发明提供的智能消防水炮可靠性定位算法步骤如下:步骤1-3如图3所示:步骤1:水炮在x平面沿逆时针旋转扫描,水平探测组件扫描到火堆左侧边缘b1点时,水平探测组件反馈回来火灾信号,此时记录x平面旋转角度∠b1;步骤2:水炮在x平面继续逆时针扫描,水平探测组件持续反馈回来火灾信号,到达火堆右侧边缘b2点时,水平探测组件火灾信号消失,此时记录x平面旋转角度∠b2;步骤3:计算水炮从b2点返回火堆根部x平面中心c点角度:∠α= k1×
(∠b2-∠b1)
ꢀ÷
2,式中k1为水平火灾信号强度系数;水炮反方向返回,顺时针旋转α度,喷水炮管在x平面正对火堆中间;步骤4-5如图4所示:步骤4:水炮在y平面从垂直于地面开始向上扫描,垂直探测组件扫描到火堆y平面根部c点时,垂直探测组件反馈回来火灾信号,此时记录y平面的旋转角度∠q1,可以计算出:
射水半径l= h
×
tan(q1);步骤5:水流需要上扬一定角度才能使落水点才能到达c点,即水流不是沿着r线段从o点到c点,而是沿着s弧线喷射,综合重力加速度、韦达定理得到射水曲线公式
①
,计算出射水仰角q:
①ꢀ
(((g/2)
ꢀ×
l2)
÷v2
)-h)
ꢀ×
(tanq)2 l
×
tanq (g/2)
×
l2)
÷v2
=0;式中:v——水炮水嘴出水速度;h——水炮安装高度;g——重力加速度;l——射水半径。
16.再计算出y平面上的补偿角度∠β=∠q-∠q1;水炮继续在y平面向上旋转β度作为射水曲线补偿;步骤6如图3-4所示:步骤6:根据火苗抖动摇摆弧长lx、不同的定位投影半径l,计算x平面的二次补偿角:α1=lx
×
360
÷
(2
×
π
×
l);式中:l——射水半径;lx——火苗抖动摇摆弧长(图3中lx1-b1距离);水炮继续在x平面顺时针旋转α1度后,到达更准确的火中心c1,定位完成。
17.如图5所示,进一步解释步骤6进行x平面二次补偿的原理:火苗抖动摇摆是左右摇摆,实际火堆大小是b1—b2,由于火的左右摇摆,火的大小变成了lx1—lx2;当燃料燃烧量固定,即火模型固定,在室内燃烧的场景下,风吹影响小,那么火的左右摇摆幅度lx是固定的,即左右摇摆角度都是α1;水炮逆时针扫描,先扫描b1点,再扫描b2点,实际扫描到的是lx2点;步骤3返回火堆中心c点,实际上c1点才是真正火堆中心。水平扫描b2点时,根据反馈回来信号的动态变化,可以测量弧长lx的值。所以计算出摇摆角度α1后,需要继续逆时针旋转α1度后才达到火中心c1点。
18.下面提供一个具体实施例:智能消防水炮现场安装高度为10米,根据本发明提供的定位算法步骤如下:步骤1:水炮在x平面沿逆时针旋转扫描,水平探测组件扫描到火堆左侧边缘b1点时,水平探测组件反馈回来火灾信号,此时记录x平面旋转角度∠b1,∠b1点的x坐标角从单片机中读出,为100度;步骤2:水炮继续在x平面逆时针扫描,水平探测组件持续反馈回来火灾信号,到达火堆右侧边缘b2点时,水平探测组件火灾信号消失,此时记录x平面旋转角度∠b2,∠b2点的x坐标角从单片机中读出,为110度;步骤3:计算水炮从b2点返回火堆根部x平面中心c点角度:∠α= k1×
(∠b2-∠b1)
÷
2,k1水平火灾信号强度系数为试验经验值,k1=0.23,∠α= k1×
(∠b2-∠b1)
÷
2=0.23
×
(110-100)
÷
2=1.15(度),水炮顺时针旋转1.15度,喷水炮管在x平面正对火堆中间;步骤4:x平面保持不动,水炮在y平面从垂直与地面开始向上扫描,垂直探测组件
扫描到火堆y平面根部c点时,垂直探测组件反馈回来火灾信号,此时记录y平面的旋转角度∠q1,∠q1从单片机中读出,∠q1=45度;可以计算出:射水半径l= h
×
tan(q1)=10
×
tan(45)=10(米);步骤5:计算射水仰角q:v为试验数据,固定流量为5l时,流速固定设v=32米/秒,g重力加速度,方便计算取9.8m/,根据射水曲线公式:
①ꢀ
(((g/2)
ꢀ×
l2)
÷v2
)-h)
ꢀ×
(tanq)2 l
×
tanq (g/2)
×
l2)
÷v2
=0,(((9.8/2)
ꢀ×
102)
÷
322)-10)
ꢀ×
(tanq)2 10
×
tanq (9.8/2)
×
102)
÷
322=0,-9.52
×
(tanq)2 10
×
tanq 0.48=0,令tanq=x,可得:-9.52*x2 10*x 0.48=0,由韦达定理x
1,2
=,b=10,a=-9.51,c=0.49,计算可得:x1=-0.04598673(负数,舍去),x2=1.096406898,即tanq=1.096406898,反三角函数计算后,得∠q=47.63(度);再计算出y平面的补偿角度∠β=∠q-∠q1=47.63-45=2.63(度),则水炮继续在y平面向上旋转2.63度作为射水曲线补偿;步骤6:计算x平面的二次补偿角:火苗抖动摇摆弧长lx,试验值lx=0.3米,α1=lx
×
360
÷
(2
×
π
×
l)=(0.3
×
360)
÷
(2
×
3.14
×
10)=1.72(度)水炮继续在x平面顺时针旋转1.72度后,定位完成。
19.上述计算过程,在智能消防水炮mcu模块控制程序中预先植入相应代码,即可自动完成计算。
20.本发明采用自主创新方法解决智能消防水炮定位问题,整个定位算法中,考虑了不同安装高度、不同管道压力的情况,考虑了火堆大小、燃烧介质带来的火苗抖动摇摆等多种因素影响下的精确定位,可靠性高。
21.以上所述,仅为本发明的较佳实例,并非对本发明任何形式上和实质上的限制,凡属本发明思路下的技术方案均属于本发明的保护范围,凡依据本发明实质技术对上述实例所做的任何等效变更和修饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。