1.本发明涉及消防器械技术领域,更为具体地,涉及一种智能消防机器人。
背景技术:
2.消防机器人作为特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用。现有的消防机器人大多数是消防机器人能代替消防救援人员进入易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场进行消防灭火,避免消防人员受到伤害。还有一部分的消防机器人是做巡查预警和初期火灾的预处理,这一类消防机器人火灾处理的手段相对单一,不能应对复杂的火灾情况,同时缺少对不同尺寸的物体发生燃烧情况下的精准处理,不具备随着物体的尺寸进行灭火区域或阻隔火灾范围的调整,将初期火灾限制或消灭在最小的范围内的功能。
技术实现要素:
3.本发明要解决的技术问题是:针对现有技术存在的问题,提供了一种智能消防机器人,可以监控火灾风险且对火灾风险或已经发生火灾的物体的尺寸进行识别,自动调整灭火平台的尺寸将该物体罩住、隔绝,阻止火灾范围的扩大;同时灭火平台集合多种灭火手段,从灭火平台底部喷射泡沫进行地面阻隔,其中部喷射灭火粉剂灭火,其顶部空间抽真空切断然后燃烧条件,整个过程自动化程度高,且容易搭建适合厂房的升级改造。
4.本发明要解决的技术问题采用以下技术方案来实现:一种智能消防机器人,包括框架、驱动单元、灭火平台和监测装置,所述框架为长方体框架,驱动单元分别安装在框架的八个顶角上,驱动单元包括驱动电机、螺旋绕线柱、绳索和制动闸,所述螺旋绕线柱的两端分别与驱动电机和制动闸连接,绳索的一端缠绕在螺旋绕线柱上,另一端与灭火平台的双层底板连接,所述灭火平台还包括驱动立柱、辅助立柱、十字交叉杆、防火布滚筒、盖板、灭火粉喷头、粉箱、真空风机、泡沫液箱、微型泵和泡沫喷头,驱动立柱和三个辅助立柱竖直且成矩形布置在双层底板上,驱动立柱固定安装在双层底板上,辅助立柱插装在双层底板底部的滑道中,所述十字交叉杆的两端分别套设在驱动立柱与辅助立柱及相邻的两个辅助立柱上,防火布滚筒固设在驱动立柱上,盖板设在驱动立柱和辅助立柱的顶部且双层底板上设有推动盖板沿驱动立柱轴向运动的伸缩汽缸和灭火粉喷头,所述灭火粉喷头与粉箱连接,所述粉箱、真空风机、泡沫液箱均固设在双层底板上,真空风机的吸气口设在双层底板与盖板之间,所述微型泵与泡沫液箱和泡沫喷头连接,所述泡沫喷头安装在驱动立柱和辅助立柱的底部,所述监测装置包括u形支架、环形支架、十字摆杆、摆动电机、行走电机、摄像头、温度传感器和烟雾传感器,所述u形支架的两端分别设有环形支架和行走电机,所述行走电机与框架接触配合,环形支架内呈十字形对称设有一对滑槽和一对铰接的镜像布置的摇臂,所述十字摆杆呈十字形其两个对称端插装在所述一对滑槽内,其另外两个对称端与所述摇臂的端部连接,所述摇臂通过皮带或链条与摆动电机连接,所述摄像头、温度传感器和烟雾传感器均安装在十字摆杆上。
5.优选地,所述螺旋绕线柱的上方轴向平行设有排线导柱,排线导柱上套设有与其螺纹配合连接的滑块,排线导柱与螺旋绕线柱通过同步带传动连接,滑块上设有供绳索穿过的直角通孔。
6.优选地,所述排线导柱包括排线光轴和排线丝杠,滑块与所述排线丝杠螺纹配合连接,排线光轴穿过滑块上的导向孔起轴向导向作用。
7.优选地,所述防火布滚筒的内部设有扭簧,防火布滚筒的外部铺设有多层防火布,所述扭簧为防火布铺设在防火布滚筒上提供回弹力,防火布上设有固定在驱动立柱上的挂钩。
8.优选地,所述驱动立柱上安装有直线电机,所述直线电机推动十字交叉杆沿驱动立柱滑动。
9.优选地,所述驱动立柱和辅助立柱均设有轴向通孔,微型泵与泡沫喷头连接所使用的管道嵌装在所述轴向通孔内。
10.优选地,所述泡沫喷头呈凸字形的圆柱结构,泡沫喷头下部的大直径圆柱管壁上沿圆周均匀开设有多个用于生成泡沫的通孔,泡沫喷头上部的小直径圆柱管与微型泵连接。
11.优选地,所述框架由工业铝型材拼接组成。
12.优选地,所述螺旋绕线柱上设有供绳索缠绕导向的螺旋凹槽。
13.优选地,所述盖板由多层不同尺寸的矩形板叠加形成,所述多层的矩形板的尺寸由下到上依次增大。
14.与现有技术相比,本发明的有益效果是:可以监控火灾风险且对火灾风险或已经发生火灾的物体的尺寸进行识别,自动调整灭火平台的尺寸将该物体罩住、隔绝,阻止火灾范围的扩大;同时灭火平台集合多种灭火手段,从灭火平台底部喷射泡沫进行地面阻隔,其中部喷射灭火粉剂灭火,其顶部空间抽真空切断然后燃烧条件,整个过程自动化程度高,且容易搭建适合厂房的升级改造。
附图说明
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
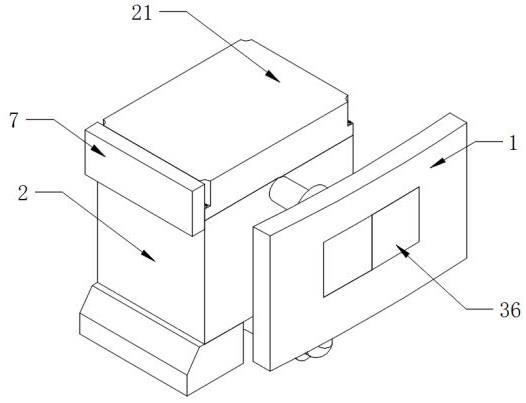
16.图1为本发明的整机的结构示意图。
17.图2为本发明的驱动单元的结构示意图。
18.图3、图4、图5为本发明的灭火平台的结构示意图。
19.图6、图7为本发明的监测装置的结构示意图。
20.图中标记:1-框架,2-驱动单元,201-驱动电机,202-螺旋绕线柱,203-绳索,204-制动闸,205-排线导柱,206-滑块,3-灭火平台,301-双层底板,302-驱动立柱,303-辅助立柱,304-十字交叉杆,305-防火布滚筒,306-盖板,307-灭火粉喷头,308-粉箱,309-真空风机,310-泡沫液箱,311-微型泵,312-泡沫喷头,4-监测装置,401-u形支架,402-环形支架,403-十字摆杆,404-摆动电机,405-行走电机,406-摄像头,407-温度传感器,408-烟雾传感
器。
具体实施方式
21.为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图和具体实施例对本发明进行详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
22.如图1和图2所示,一种智能消防机器人,包括框架1、驱动单元2、灭火平台3和监测装置4,所述框架1为长方体框架,优选地,框架1由工业铝型材拼接组成,安装方便结构轻巧,便于对厂房改装和加装。驱动单元2分别安装在框架1的八个顶角上,驱动单元2包括驱动电机201、螺旋绕线柱202、绳索203和制动闸204,螺旋绕线柱202的两端分别与驱动电机201和制动闸204连接,螺旋绕线柱202的上方轴向平行设有排线导柱205,排线导柱205包括排线光轴和排线丝杠,滑块206与排线丝杠螺纹配合连接,排线光轴穿过滑块206上的导向孔起轴向导向作用。排线导柱205与螺旋绕线柱202通过同步带传动连接,滑块206上设有供绳索203穿过的直角通孔,绳索203的一端缠绕在螺旋绕线柱202上,另一端穿过滑块206上的直角通孔与灭火平台3的双层底板301连接,为了提高绳索203均匀缠绕在螺旋绕线柱202上,螺旋绕线柱202上设有供绳索203缠绕导向的螺旋凹槽。
23.如图3、图4和图5所示,灭火平台3包括双层底板301、驱动立柱302、辅助立柱303、十字交叉杆304、防火布滚筒305、盖板306、灭火粉喷头307、粉箱308、真空风机309、泡沫液箱310、微型泵311和泡沫喷头312,驱动立柱302和三个辅助立柱303竖直且成矩形布置在双层底板301上,驱动立柱302固定安装在双层底板301上,辅助立柱303插装在双层底板301底部的滑道中,所述十字交叉杆304的两端分别套设在驱动立柱302与辅助立柱303及相邻的两个辅助立柱303上,驱动立柱302上安装有直线电机,直线电机推动十字交叉杆304沿驱动立柱302滑动。防火布滚筒305固设在驱动立柱302上,防火布滚筒305的内部设有扭簧,防火布滚筒305的外部铺设有多层防火布,扭簧为防火布铺设在防火布滚筒305上提供回弹力,防火布上设有固定在驱动立柱302上的挂钩。盖板306由多层不同尺寸的矩形板叠加形成,所述多层的矩形板的尺寸由下到上依次增大,盖板306设在驱动立柱302和辅助立柱303的顶部且双层底板301上设有推动盖板306沿驱动立柱302轴向运动的伸缩汽缸和灭火粉喷头307,灭火粉喷头307与粉箱308连接,粉箱308、真空风机309、泡沫液箱310均固设在双层底板301上,真空风机309的吸气口设在双层底板301与盖板306之间,微型泵311与泡沫液箱310和泡沫喷头312连接,泡沫喷头312安装在驱动立柱302和辅助立柱303的底部,优选地,驱动立柱302和辅助立柱303均设有轴向通孔,微型泵311与泡沫喷头312连接所使用的管道嵌装在所述轴向通孔内,泡沫喷头312整体呈凸字形的圆柱结构,泡沫喷头312下部的大直径圆柱管壁上沿圆周均匀开设有多个用于生成泡沫的通孔,泡沫喷头312上部的小直径圆柱管与微型泵311连接。
24.如图6和图7所示,监测装置4包括u形支架401、环形支架402、十字摆杆403、摆动电机404、行走电机405、摄像头406、温度传感器407和烟雾传感器408,u形支架401的两端分别设有环形支架402和行走电机405,行走电机405与框架1接触配合,环形支架402内呈十字形对称设有一对滑槽和一对铰接的镜像布置的摇臂,十字摆杆403呈十字形其两个对称端插装在所述一对滑槽内,其另外两个对称端与所述摇臂的端部连接,摇臂通过皮带或链条与
摆动电机404连接,用于识别及检测环境的摄像头406、温度传感器407和烟雾传感器408均安装在十字摆杆403上。
25.框架1根据厂房或空间大小装配完成后,驱动单元2的驱动电机201开始工作,通过绳索203将灭火平台3提升至高处,驱动电机201停止转动且制动闸204将绳索203限位,灭火平台3停留在框架1的顶部。监测装置4的温度传感器407和烟雾传感器408一直处于工作状态,对室内的温度和烟雾进行监控,同时摄像头406也通过十字摆杆403实时对厂房监控,摆动电机404转动时环形支架402摇臂开始摆动,十字摆杆403也开始摇动以增大摄像头406、温度传感器407和烟雾传感器408的监测范围。当检测到火灾风险时,通过摄像头406采集到的火险物品的位置及尺寸信息(该信息也可以根据产品种类提前录入至处理器),驱动单元2通过其绳索203将灭火平台3移动至火险物品的上方,驱动立柱302上的直线电机推动十字交叉杆304伸展,使得辅助立柱303开始运动,直至驱动立柱302和三个辅助立柱303围成的矩形区域与火险物品的尺寸相当,由于防火布滚筒305上的防火布包裹在驱动立柱302和三个辅助立柱303围成的矩形区域的外侧,且防火布滚筒305的内部设有扭簧,扭簧为防火布铺设在防火布滚筒305和所述矩形区域上提供回弹力和张紧力;随后盖板306上的伸缩汽缸推动盖板306向下运动,直至盖板306的高度接近火险物品的高度;驱动单元2通过绳索203将灭火平台3降下,直至驱动立柱302和三个辅助立柱303围成的矩形区域将火险物品罩住;微型泵311开始工作,泡沫喷头312开始在产生泡沫,阻隔气体并防止火情从地面扩散,盖板306上的灭火粉喷头307开始从上向下喷洒灭火粉剂,同时真空风机309开始工作,抽走盖板306与双层底板301之间组成密封区域(即被罩住物体上方)内的空气。
26.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,应当指出的是,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。