技术特征:
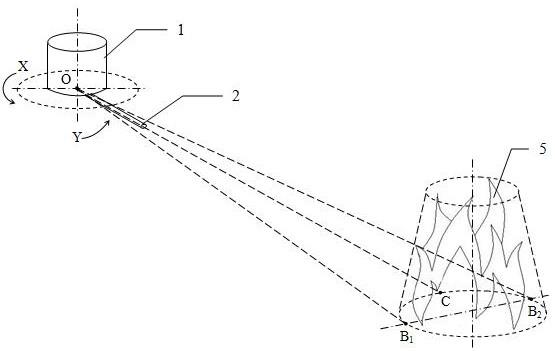
1.智能消防水炮可靠性定位灭火算法,在水平面定位水流喷射的方向角度,在垂直面定位水流喷射时炮管的抬起角度,包括如下步骤:步骤1,水炮在水平面逆时针旋转扫描,水平探测组件扫描到火堆左侧边缘b1点时,水平探测组件反馈回来火灾信号,此时记录水平面旋转角度∠b1;步骤2,水炮继续在水平面逆时针旋转扫描,水平探测组件持续反馈回来火灾信号,到达火堆右侧边缘b2点时,水平探测组件火灾信号消失,此时记录水平面旋转角度∠b2;步骤3,计算水炮从b2点返回火堆根部水平面中心点角度:∠α=(∠b2-∠b1)
÷
2,水炮朝原扫描方向相反的方向,顺时针旋转α度,喷水炮管在水平面正对火堆中间;步骤4,水炮在垂直面从垂直与地面开始向上扫描,垂直探测组件扫描到火堆垂直面根部c点时,垂直探测组件反馈回来火灾信号,此时记录垂直面的旋转角度∠q1,可以计算出:射水半径l= h
×
tan(q1);步骤5,水流需要上扬一定角度才能使落水点才能到达c点,综合重力加速度、韦达定理计算出射水仰角,水炮继续垂直面向上旋转一个角度达到射水仰角。2.根据权利要求1所述的智能消防水炮可靠性定位灭火算法,其中的步骤3为:计算水炮从b2点返回火堆根部水平面中心点角度:∠α= k1×
(∠b2-∠b1)
ꢀ÷
2,式中k1为水平火灾信号强度系数;水炮顺时针旋转α度,喷水炮管在水平面正对火堆中间。3.根据权利要求1所述的智能消防水炮可靠性定位灭火算法,其中的步骤5为:综合重力加速度、韦达定理得到射水曲线公式
①
,计算出射水仰角:
①ꢀ
(((g/2)
ꢀ×
l2)
÷v2
)-h)
ꢀ×
(tanq)2 l
×
tanq (g/2)
×
l2)
÷v2
=0;式中:q——射水仰角;v——水炮水嘴出水速度;h——水炮安装高度;g——重力加速度;l——射水半径;计算出垂直面的补偿角度∠β=∠q-∠q1;水炮继续在垂直面向上旋转β度作为射水曲线补偿。4.根据权利要求1所述的智能消防水炮可靠性定位灭火算法,还包括步骤6:根据火苗抖动摇摆弧长lx、不同的定位投影半径l,计算水平面的二次补偿角:α1=lx
×
360
÷
(2
×
π
×
l);式中:l——射水半径;lx——火苗抖动摇摆弧长;水炮继续在水平面顺时针旋转α1度后,定位完成。5.根据权利要求1所述的智能消防水炮可靠性定位灭火算法,其特征在于,步骤1、2、3中水炮在水平面旋转方向相反,即:步骤1中水炮在水平面顺时针旋转扫描,先扫描b2点并记录水平面旋转角度;步骤2中水炮继续在水平面顺时针扫描,扫描到b1点并记录水平面旋转角度;步骤3中,水炮在水平面逆时针旋转α度正对火堆中间。
技术总结
本发明涉及灭火装置技术领域,公开了一种智能消防水炮可靠性定位算法,首先水炮在水平面旋转扫描,水平探测组件扫描火堆两侧边缘点,计算旋转角度后引导水炮对准火堆中间;然后水炮在垂直面扫描,垂直探测组件扫描到火堆根部,计算出射水半径,再计算出射水仰角,水炮继续垂直方向旋转到达准确位置。本发明提供的智能消防水炮定位算法改变采用单一固定补偿的方式,根据探测组件实时反馈火灾信号,对水炮水平面和垂直面的角度进行动态调整,更加能够适应火灾现场的情况;还考虑了不同安装高度、不同管道压力的情况,考虑了火堆大小、燃烧介质带来的火苗抖动摇摆等多种因素影响,精确定位,可靠性高。可靠性高。可靠性高。
技术研发人员:莫本团 李炳坚 冼盛才 陈鸿光
受保护的技术使用者:佛山市南海天雨智能灭火装置有限公司
技术研发日:2022.07.26
技术公布日:2022/9/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。