1.本发明属于点云数据处理技术领域,更具体地说是涉及一种基于距离的点云切片处理方法及系统。
背景技术:
2.目前,激光点云数据处理包括点云滤波、点云配准、点云分割与分类、点云三维重建等相关技术,但在点云数据尺寸信息处理的应用比较少。
3.采用三维激光扫描技术采集点云数据具有高速度、高精度、可量测等优点,这使其成为当前获取三维数据的热门手段。但点云的无组织、非结构化、高密度特性使得对点云数据尺寸信息的提取成为研究的热点与难点。
4.点云切片技术可以对点云进行切片处理,使得处理的点云数量减少。而目前的点云切片处理多数是固定的厚度,在点云密度特别高的情况下,固定厚度的切片要处理的数据依然非常多,处理速度也很慢。
5.因此,基于上述现状,本领域需要研发一种更加高效的点云切片技术。
技术实现要素:
6.针对现有技术存在的上述问题,本发明提供了一种基于距离的点云切片处理方法及系统,本发明可以对激光点云数据进行切片处理,以适应不同类型的点云,具有很强的适应性,且处理速度快。
7.为了实现上述目的,本发明采用如下技术方案:
8.一种基于距离的点云切片处理方法,按如下步骤进行:
9.s1、获得待处理的点云原始数据a,去除地面点云;
10.s2、计算平均值点b(x1,y1,z1);
11.s3、将每个轴的数值按照从大到小排序,按照顺序计算每个点的之间的间隔距离,并算出平均间隔距离dx,dy,dz;
12.s4、确定点云切片的数量n,在平均值点b根据平均间隔距离进行切片。
13.优选的,步骤s2中,由于一般点云在z轴方向上公布比较密集,需要对z1的值加上10到30倍的dz,最终得到平均值点b(x1,y1,z1)。
14.优选的,步骤s3包括:
15.s31、对于x轴,把每个点云数据根据x值的大小,从大到小排序,按照上一位减下一位算出每个相邻点的距离,并算出平均值dx;
16.s32、对于y轴,把每个点云数据根据y值的大小,从大到小排序,按照上一位减下一位算出每个相邻点的距离,并算出平均值dy;
17.s33、对于z轴,把每个点云数据根据z值的大小,从大到小排序,按照上一位减下一位算出每个相邻点的距离,并算出平均值dz。
18.优选的,步骤s4包括:
19.s41、确定要切片的平面;
20.s42、点云切片的起始点是平均值点b;
21.s43、点云切片的厚度与数量n和平均间隔距离相关,以垂直z轴切片为例,判断每个点z值大小是否在(z1-1/2
×n×
dz,z1 1/2
×n×
dz)区间里面,这些点就是切片的结果。
22.本发明还公开了一种基于距离的点云切片处理系统,其包括如下模块:
23.获取点云原始数据模块:获得待处理的点云原始数据a,去除地面点云;
24.计算平均值点模块:计算平均值点b(x1,y1,z1);
25.计算平均间隔距离模块:将每个轴的数值按照从大到小排序,按照顺序计算每个点的之间的间隔距离,并算出平均间隔距离dx,dy,dz;
26.切片模块:根据点云切片的数量n,在平均值点b根据平均间隔距离进行切片。
27.优选的,计算平均值点模块中,z1的值加上10到30倍的dz,最终得到平均值点b。
28.优选的,计算平均间隔距离模块具体如下:
29.对于x轴,把每个点云数据根据x值的大小,从大到小排序,按照上一位减下一位算出每个相邻点的距离,并算出平均值dx;
30.对于y轴,把每个点云数据根据y值的大小,从大到小排序,按照上一位减下一位算出每个相邻点的距离,并算出平均值dy;
31.对于z轴,把每个点云数据根据z值的大小,从大到小排序,按照上一位减下一位算出每个相邻点的距离,并算出平均值dz。
32.优选的,切片模块具体如下:
33.确定要切片的平面;点云切片的起始点是平均值点b;点云切片的厚度与数量n及平均间隔距离相关,在垂直z轴切片中,若每个点z值大小在(z1-1/2
×n×
dz,z1 1/2
×n×
dz)区间内,则这些点就是切片的结果。
34.与现有技术相比,本发明公开提供了一种基于距离的点云切片处理方法,解决了在处理海量点云数据的过程中效率较低的问题,并且适应不同密度的点云,有很强的适应性。
附图说明
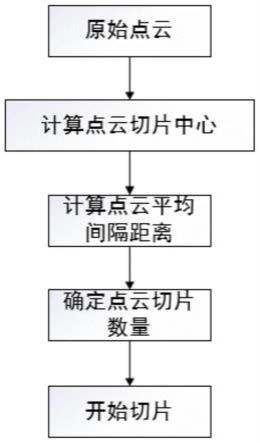
35.图1是本发明实施例1的方法流程示意图;
36.图2是本发明处理好的点云图;
37.图3是本发明xyz轴切片结果图;
38.图4是本发明一种基于距离的点云切片处理系统框图。
具体实施方式
39.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.实施例1
41.如图1所示,本发明实施例公开了及一种基于距离的点云切片处理方法,包括:
42.s1:获取欲处理的原始点云数据,并去除地面点云获得点云集合q1;
43.设激光雷达安装高度为h,去除点云中z值为h的点云;
44.s2:计算点云集合q1的平均值点b(x1,y1,z1),计算公式为:
[0045][0046]
(xi,yi,zi)是点云的点,n是点云的数量;
[0047]
对z1的值加上10到30倍的dz,最终得到平均值点b;
[0048]
s3:将每个轴的数值按照从小到大的顺序,把点云集合q1中的点按照x、y、z值的大小,分别从大到小排序,按照上一位减下一位算出每个相邻点的距离,并计算每个点的间隔并计算平均值dx,dy,dz,计算公式为:
[0049][0050]
(xi,yi,zi)是点云的点,n是点云的数量;
[0051]
s4:确定要切片的平面,点云切片的起始点是平均值点b,点云切片的厚度与数量n及平均间隔距离相关。确定点云切片的数量n后,在平均值点b根据平均间隔距离进行切片。以垂直z轴切片为例,判断每个点z值大小是否在(z1-1/2
×n×
dz,z1 1/2
×n×
dz)区间里面,这些点就是切片的结果,如图2-3所示。
[0052]
不同的点云数据密度不同,固定距离的点云切片,剩下的点依然很多;本发明采用基于距离的点云切分方法大大降低了待处理点云的数量,并且有很强的点云适应性。
[0053]
实施例2
[0054]
如图4所示,本实施例公开了及一种基于距离的点云切片处理系统,包括如下模块:
[0055]
获取点云原始数据模块:获取欲处理的原始点云数据,并去除地面点云获得点云集合q1;设激光雷达安装高度为h,去除点云中z值为h的点云;
[0056]
计算平均值点模块:计算点云集合q1的平均值点b(x1,y1,z1),计算公式为:
[0057][0058]
(xi,yi,zi)是点云的点,n是点云的数量;
[0059]
对z1的值加上10到30倍的dz,最终得到平均值点b;
[0060]
计算平均间隔距离模块:将每个轴的数值按照从小到大的顺序,把点云集合q1中的点按照x、y、z值的大小,分别从大到小排序,按照上一位减下一位算出每个相邻点的距离,并计算每个点的间隔并计算平均值dx,dy,dz,计算公式为:
[0061][0062]
(xi,yi,zi)是点云的点,n是点云的数量;
[0063]
切片模块:确定要切片的平面,点云切片的起始点是平均值点b,点云切片的厚度与数量n及平均间隔距离相关。确定点云切片的数量n后,在平均值点b根据平均间隔距离进行切片。以垂直z轴切片为例,判断每个点z值大小是否在(z1-1/2
×n×
dz,z1 1/2
×n×
dz)区间里面,这些点就是切片的结果。
[0064]
本说明书实施例所述的内容仅仅是对发明构思的实现形式的列举,本发明的保护范围的不应当被视为仅限于实施例所陈述的具体形式,本发明的保护范围也及于本领域技术人员根据本发明构思所能够想到的等同技术手段。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
