1.本发明属于城市夜间光环境监测技术领域,具体涉及一种城市夜间光环境地面实测与遥感观测的天地协同监测方法。
背景技术:
2.伴随着城镇基础设施的推进、经济的发展和人类夜间活动需求的上升,城市夜间照明的人工光源数量急剧增加,城市夜间光环境也已经成为生态环境的重要组成要素。但过度的人工照明引起的光污染对地区生态环境、人类身体健康、天文观测、能源消耗、交通安全都造成了一定的负面影响。在城市尺度夜间照明研究中,传统的地面观测手段研究尺度较小、无法适应快速增长的城市规模。早期的遥感观测手段受数据源分辨率的限制,无法进行微观尺度的城市光环境研究。但高分辨率遥感数据、高精度地面测量设备的出现为城市尺度的夜间光环境研究提供了新的机遇。基于此,本发明方法对现有的高精度遥感观测、实测技术的优点进行融合,从多层次对整体空间下的夜间光污染分布进行观测和分析,对推进智慧城市光环境控制,防治光污染,保护生态环境带来重要的应用价值和实际意义。
技术实现要素:
3.本发明旨在提供一种城市夜间光环境地面实测与我国现有的luojia-01卫星遥感数据进行“天地协同”的监测方法,该监测方法具体分为三个层级展开,包括:宏观层面,划分与遥感图像对位的地面网格,并在arcgis(地理信息系统)数据处理平台进行分析;中观层面,选定地面实测单元网格;微观层面,确定地面实测单元网格内最优测点密度,以及地面实测方法,从而实现地面测量与卫星遥感图像对位的数据分析。并建立多物理量的测试指标包括:亮度、照度、光谱等,最大程度地对城市夜间光环境进行动态的监测。
4.本发明的技术方案:
5.一种城市夜间光环境天地协同监测方法,包括以下步骤:
6.步骤1:建立夜光遥感图像网格与对应的测量区域地面总量网格的对位关系
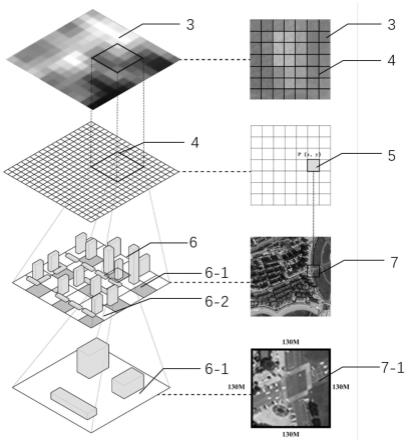
7.1.1宏观层面:夜光遥感影像网格4提取,夜光遥感影像网格4与对应的测量区域地面总量网格6进行位置匹配。
8.在arcgis中同时导入地面实测区域2的卫星影像7以及预处理后的luojia-01夜光遥感影像3,利用gis的创建渔网工具(create fishnet)将luojia-01夜光遥感影像3按照像素网格进行划分。夜光遥感影像3划分成若干个夜光遥感影像网格4,每个夜光遥感影像网格4大小表示地面实际的距离为130m
×
130m;并通过地理坐标5作为定位媒介,借助地面实测区域2对应的卫星影像7和夜光遥感影像3具有共同的地理坐标5,定位地面实测区域2,并对定标后的地面实测区域2进行实际网格划分,确定地面总量网格6。由此在地面实测区域2范围内,对提取的夜光遥感影像网格4与地面总量网格6进行了定位,确定了夜光遥感影像网格4与地面总量网格6的对应关系。每个地面总量网格6对应的地面实测单元网格卫星影像均为130m
×
130m,都具有对应的遥感数值。
9.1.2中观层面:选定地面测量网格
10.为满足地面实测的可达性和准确性,步骤1.1得到地面总量网格6由地面实测单元网格6-1和地面间隔单元网格6-2组成,每个地面实测单元网格6-1和地面间隔单元网格6-2的距离均为130m
×
130m,都具有对应的遥感数值。地面实测单元网格6-1的选择规则为:在地面总量网格6中选取地面实测单元网格6-1,地面实测单元网格6-1之间有1至3个地面间隔单元网格6-2。
11.1.3微观层面:确立地面测量网格内的最优测点密度
12.由于测量区域地面总量网格6中地面实测单元网格6-1的尺寸为130m
×
130m的方形网格,为了使得地面测量网格的数值能够准确地反映地面光环境情况,因此在地面测量网格内使用多点测量求平均值的方法,计算地面测量网格的实测数据值。由于不同测点的数量会对地面测量网格的值产生影响,因此引入点密度的概念,点密度为地面测量网格内的测点数量。可在地面实测单元网格6-1中选择二个测试点(点密度二8)、四个测试点(点密度四9)和六个测试点(点密度六10)。根据四个方位各自选择一个测点,最优测点推荐点密度四9。
13.步骤2:选择实地测量的仪器
14.为了获得多参数的光环境数据,选取亮度计、照度计、cdd全景相机(配鱼眼镜头)分别对星等亮度、亮度、光谱、光环境实况数据进行收集,主要进行上视窗13、水平视窗14和下视窗15的测量。其中,亮度计用于每个测点的测量,包括亮度计上视窗13-1、亮度计水平视窗14-1、亮度计下视窗15-1的亮度,每个测点每个视窗测量三次。照度计用于每个测点的测量,包括照度计上视窗13-2、照度计水平视窗14-2、照度计下视窗15-2的照度和光谱数据。同时,cdd全景相机(配鱼眼镜头)以固定的感光度、快门速度、光圈大小,拍摄每个测点的全景夜天空图像。
15.步骤3:选择合适的测量环境
16.为减少空气质量、气象等无关变量影响因素的影像,选择天空晴朗、无云且大气能见度大于10km的夜晚进行实地测量。
17.步骤4:进行测点照度与亮度的测量
18.以人眼11的高度,即以垂直高于地面1.6m的位置作为光环境测量的视线水平面12,以此来测量人眼水平面的城市夜间光环境空间分布情况。在每一个测点进行城市空间三个视窗的观测,三个视窗分别为:上视窗13(垂直于地面向上,观测夜天空天顶亮度)、水平视窗14(水平平行于地面,平行于道路方向,观测视线方向光环境亮度)和下视窗15(垂直于地面向下,观测地面光环境亮度)。具体地:
19.4.1:对于上视窗13(范围角度),使用照度计、亮度计对所在测点的照度、亮度、光谱数据进行夜天空天顶方向的采集。
20.4.2:水平视窗14以1.6m高度作为人眼11所在的视线水平面12,将视线水平面12按30
°
的间隔划分成12个测量角度。将照度计、亮度计垂直于地面,平行于人脸方向根据指南针指示在各个测量角度进行照度、亮度数据的采集,并将各类数据12个测量角度的均值作为该测点的水平方向对应的光环境参数数值。
21.4.3:下视窗15(范围角度)使用照度计、亮度计分别采集地面方向的照度、亮度数据;具体测量方法为各个仪器平行于地面1.6m高度进行地面方向测量。
22.观测过程中尽量选择测量仪器取景窗内少建筑树木遮挡,远离路灯至少8m的距离进行测量,以此减少地表测点的环境干扰影响。
23.在每个测点重复步骤4.1-4.3三次,采用多次测量取平均值的方法排除偶然因素的干扰,以三次测量的均值作为该测点的最终数值。
24.该方法采用的测试装置包括:
25.亮度计、照度计、全景相机、指南针、电脑和夜光遥感卫星数据。
26.所述亮度计具有10
°
半角宽度敏感度,即测量垂直方向20
°
范围内光环境亮度情况,显示为区域平均行灯亮度,单位mag/arcsecond2。
27.所述的照度计主要测量区域垂直方向上的照度、色温、光谱和显色指数等光学参数,对环境的照度均匀性、光源色温等进行评估。
28.所述的全景相机带有鱼眼镜头,用于拍摄观测点城市夜间光环境全天空实际状况,用于后期地面照明情况分析和区域光环境亮度分布研究。
29.所述的指南针,主要用于测量仪器的观测方向。
30.所述的夜光遥感卫星数据,以arcgis(地理信息系统)为数据处理平台,用luojia-01夜光遥感数据提取研究区域的地面网格。
31.本发明的有益效果:本发明解决了传统的夜间光环境的实地测量方法无法与卫星遥感的夜间灯光数据进行对位分析的问题,本发明从宏观、中观、微观三个层次对地面实测方法进行重构,解决了遥感-实测数据关联性研究中如何实测的问题。智能光环境监测作为智慧城市的重要组成之一,本发明是未来防控光污染、保护夜间生态的重要方法。
附图说明
32.图1是本发明所述方法的遥感数据采集示意图。
33.图2是本发明所述方法的地面测量网格确立示意图。
34.图3是本发明所述方法的测点密度选择示意图。
35.图4是本发明所述方法的城市空间三个视窗的感光范围示意图。
36.图5是本发明所述方法的测量夜天空天顶光环境示意图。
37.图6是本发明所述方法的测量视线方向光环境示意图。
38.图7是本发明所述方法的测量地面光环境示意图。
39.图中:1遥感卫星数据(luojia-01);2地面实测区域;3夜光遥感影像;4夜光遥感影像网格;5地理坐标;6地面总量网格;6-1地面实测单元网格;6-2地面间隔单元网格;7卫星影像;7-1地面实测单元网格卫星影像;8点密度二;9点密度四;10点密度六;11人眼;12视线水平面;13上视窗;14水平视窗;15下视窗;13-1亮度计上视窗;13-2照度计上视窗;14-1亮度计水平视窗;14-2照度计水平视窗;15-1亮度计下视窗;15-2照度计下视窗。
具体实施方式
40.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
41.本发明提供了一种城市夜间光环境天地协同监测方法,包括以下步骤:
42.步骤1:建立夜光遥感图像网格与对应的测量区域地面总量网格的对位关系
43.1.1宏观层面:夜光遥感影像网格4提取,夜光遥感影像网格4与对应的测量区域地面总量网格6进行位置匹配。
44.在arcgis中同时导入地面实测区域2的卫星影像7以及预处理后的luojia-01夜光遥感影像3,利用gis的创建渔网工具(create fishnet)将luojia-01夜光遥感影像3按照像素网格进行划分。夜光遥感影像3划分成若干个夜光遥感影像网格4,每个夜光遥感影像网格4大小表示地面实际的距离为130m
×
130m;并通过地理坐标5作为定位媒介,借助地面实测区域2对应的卫星影像7和夜光遥感影像3具有共同的地理坐标5,定位地面实测区域2,并对定标后的地面实测区域2进行实际网格划分,确定地面总量网格6。由此在地面实测区域2范围内,对提取的夜光遥感影像网格4与地面总量网格6进行了定位,确定了夜光遥感影像网格4与地面总量网格6的对应关系。每个地面总量网格6对应的地面实测单元网格卫星影像均为130m
×
130m,都具有对应的遥感数值。
45.1.2中观层面:选定地面测量网格
46.为满足地面实测的可达性和准确性,步骤1.1得到地面总量网格6由地面实测单元网格6-1和地面间隔单元网格6-2组成,每个地面实测单元网格6-1和地面间隔单元网格6-2的距离均为130m
×
130m,都具有对应的遥感数值。地面实测单元网格6-1的选择规则为:在测量区域地面总量网格6中选取地面实测单元网格6-1,地面实测单元网格6-1之间有1至3个地面间隔单元网格6-2。
47.1.3微观层面:确立地面测量网格内的最优测点密度
48.由于测量区域地面总量网格6中地面实测单元网格6-1的尺寸为130m
×
130m的方形网格,为了使得地面测量网格的数值能够准确地反映地面光环境情况,因此在地面测量网格内使用多点测量求平均值的方法,计算地面测量网格的实测数据值。由于不同测点的数量会对地面测量网格的值产生影响,因此引入点密度的概念,点密度为地面测量网格内的测点数量。可在地面实测单元网格6-1中选择二个测试点(点密度二8)、四个测试点(点密度四9)和六个测试点(点密度六10)。根据四个方位各自选择一个测点,最优测点推荐点密度四9。
49.步骤2:选择实地测量的仪器
50.为了获得多参数的光环境数据,选取亮度计、照度计、cdd全景相机(配鱼眼镜头)分别对星等亮度、亮度、光谱、光环境实况数据进行收集,主要进行上视窗13、水平视窗14和下视窗15的测量。其中,亮度计用于每个测点的测量,包括亮度计上视窗13-1、亮度计水平视窗14-1、亮度计下视窗15-1的亮度,每个测点每个视窗测量三次。照度计用于每个测点的测量,包括照度计上视窗13-2、照度计水平视窗14-2、照度计下视窗15-2的照度和光谱据。同时,cdd全景相机(配鱼眼镜头)以固定的感光度、快门速度、光圈大小,拍摄每个测点的全景夜天空图像。
51.步骤3:选择合适的测量环境
52.为减少空气质量、气象等无关变量影响因素的影像,选择天空晴朗、无云且大气能见度大于10km的夜晚进行实地测量。
53.步骤4:进行测点照度与亮度的测量
54.以人眼11的高度,即以垂直高于地面1.6m的位置作为光环境测量的视线水平面
12,以此来测量人眼水平面的城市夜间光环境空间分布情况。在每一个测点进行城市空间三个视窗的观测,三个视窗分别为:上视窗13(垂直于地面向上,观测夜天空天顶亮度)、水平视窗14(水平平行于地面,平行于道路方向,观测视线方向光环境亮度)和下视窗15(垂直于地面向下,观测地面光环境亮度)。
55.4.1:对于上视窗13(范围角度),使用照度计、亮度计对所在测点的照度、亮度、光谱数据进行夜天空天顶方向的采集。
56.4.2:水平视窗14以1.6m高度作为人眼11所在的视线水平面12,将视线水平面12按30
°
的间隔划分成12个测量角度。将照度计、亮度计垂直于地面,平行于人脸方向根据指南针指示在各个测量角度进行照度、亮度数据的采集,并将各类数据12个测量角度的均值作为该测点的水平方向对应的光环境参数数值。
57.4.3:下视窗15(范围角度)使用照度计、亮度计分别采集地面方向的照度、亮度数据;具体测量方法为各个仪器平行于地面1.6m高度进行地面方向测量。
58.观测过程中尽量选择测量仪器取景窗内少建筑树木遮挡,远离路灯至少8m的距离进行测量,以此减少地表测点的环境干扰影响。
59.在每个测点重复步骤4.1-4.3三次,采用多次测量取平均值的方法排除偶然因素的干扰,以三次测量的均值作为该测点的最终数值。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。