一种高空无损检测机器人
【技术领域】
1.本实用新型涉及无损检测技术领域,具体涉及一种高空无损检测机器人。
背景技术:
2.无损检测是指在检查机械材料内部不损害或不影响被检测对象使用性能、不伤害被检测对象内部组织的前提下,利用材料内部结构异常或缺陷存在引起的热、声、光、电、磁等反应的变化,以物理或化学方法为手段,借助现代化的技术和设备器材。
3.小型无人机平台具有体积小、重量轻,航时长,便于携带的特点,可垂直起降、悬停;结构采用模块化设计,可快速组装拆卸,便于运输;动力系统采用成熟高效无刷电机及碳纤维螺旋桨,电池采用高能量密度电池,使无人机航时得到进一步提高,小型无人机系统智能化程度高,具备环境感知能力与图像采集功能,可对目标进行图像检测识别、锁定与跟踪。
4.压力容器是一种能够承受压力的密闭容器。压力容器的用途极为广泛,它在工业、民用、军工等许多部门以及科学研究的许多领域都具有重要的地位和作用。其中以在化学工业与石油化学工业中用最多。压力容器在化工与石油化工领城,主要用于传热、传质、反应等工艺过程,以及贮存、运输有压力的气体或液化气体。为保证压力容器运营期焊缝结构的可靠性,尤其是长期服役条件下的压力容器焊缝的安全性问题,开展压力容器运营期焊缝健康检测的研究是十分必要的。但目前的压力容器运营期焊缝检测主要采用人工手持无损探伤设备在压力容器壁面移动的方式来开展,产生如效率低、占时长、人力物力耗费巨大、不安全因素多、限制检测范围、复检定位难等缺点。尤其针对大型的高空压力容器设备还需要借助升降设备,更耗人力物力。
5.有鉴于此,本案发明人针对现有技术中的上述缺陷深入研究,本技术人设计了一种高空无损检测机器人,遂有本案产生。
技术实现要素:
6.本实用新型要解决的技术问题是现有压力容器的检测主要采用人工手持无损探伤设备在压力容器壁面移动的方式来开展,具有效率低、占时长、人力物力耗费巨大、不安全因素多、限制检测范围、复检定位难等缺点,尤其针对大型的高空压力容器设备还需要借助升降设备,更耗人力物力,为此本实用新型提供了一种高空无损检测机器人,采用小型无人机、视觉识别方式及无损检测理念,可以实现对化工等压力容器各个部位的焊缝的自动识别、定位及自动超声探伤,具有成本低,机动速度快,效率高、检测范围广等优点。
7.本实用新型是这样实现的:一种高空无损检测机器人,包括无人机,还包括对待检设备的焊缝进行识别的视觉识别机构以及对焊缝进行定位探伤的检测机构;所述视觉识别机构设置在无人机的顶部;所述检测机构位于无人机的前端,且检测机构与无人机转动连接。
8.进一步的,所述检测机构包括电机、转动组件和超声探伤组件;所述无人机包括支
架,所述支架内形成有容置内腔;所述电机安装于所述容置内腔内,所述电机的输出轴伸出支架外部并与转动组件的一端固定连接,所述转动组件的另一端与超声探伤组件固定连接。
9.进一步的,所述转动组件包括支撑件、弹性组件和连接杆;所述支撑件的一端与电机的输出轴固定连接,支撑件的另一端形成有滑动槽,所述连接杆的一端伸进滑动槽内并与支撑件滑动连接,连接杆的另一端与超声探伤组件固定连接;所述弹性组件套接在连接杆的外部,且弹性组件的一端与支撑件连接,弹性组件的另一端与超声探伤组件连接。
10.进一步的,所述无人机还包括转动副和旋翼组件;所述转动副的一端伸进所述容置内腔并与所述支架连接,转动副的另一端与一对所述旋翼组件连接。
11.进一步的,所述无人机的周围通过转动副连接有3对所述旋翼组件。
12.进一步的,还包括电源及控制系统,所述电源及控制系统安装于所述容置内腔内,所述视觉识别机构、检测机构和旋翼组件均与所述电源及控制系统电性连接。
13.进一步的,所述弹性组件为弹簧。
14.进一步的,还包括控制所述无人机飞行的遥控设备。
15.本实用新型的优点在于:
16.1.本实用新型的高空无损检测机器人采用小型无人机、视觉识别的方式和无损的检测理念,实现对化工等领域的压力容器上的各个部位焊缝进行自动识别、定位及自动超声探伤,具有成本低、机动速度快、效率高、检测范围广等优点。
17.2.本实用新型的检测机构包括电机、转动组件和超声探伤组件;当视觉识别机构锁定焊缝位置之后,电机的输出轴转动带动转动组件进行圆周旋转,进一步带动超声探伤组件对准并紧贴待检区域上的焊缝,使得超声探伤组件与焊缝紧密贴合,提高了检测、探伤的精准性,实现焊缝的自动识别、定位及自动超声探伤。
【附图说明】
18.下面参照附图结合实施例对本实用新型作进一步的说明。
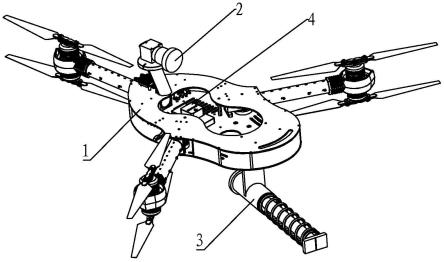
19.图1是本实用新型中高空无损检测机器人的结构示意图。
20.图2是本实用新型中检测机构的结构示意图。
21.图3是本实用新型中转动副和旋翼组件的结构示意图。
22.附图标记说明:
23.100-机器人;1-无人机;11-支架;111-容置内腔;112-操作口;12-转动副;13-旋翼组件;131-第一旋翼;132-第二旋翼;133-转动电机;
24.2-视觉识别机构;21-支撑杆;22-高像素相机;
25.3-检测机构;31-电机;311-输出轴;32-转动组件;321-支撑件;322-弹性组件;323-连接杆;33-超声探伤组件;
26.4-电源及控制系统。
【具体实施方式】
27.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显
然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
28.参考图1-3所示,本实用新型的一种高空无损检测机器人100,包括无人机1,还包括对待检设备的焊缝进行识别的视觉识别机构2、以及对焊缝进行定位探伤的检测机构3;视觉识别机构2设置在无人机1的顶部,检测机构3位于无人机1的顶端,且检测机构3与无人机1转动连接。
29.工作时,检测人员控制机器人100飞行到高空待检设备区域(如化工压力容器)周围,机器人100通过视觉识别机构2自动识别压力容器上出问题的焊缝位置,当锁定需要检测的焊缝位置之后,机器人100控制检测机构3旋转,以对准并锁定焊缝位置,检测机构3的检测端贴在焊缝上实现对焊缝的定位及自动探伤。优选的,视觉识别机构2包括与一端与支架11固定连接的支撑杆21,支撑杆21的另一端连接有高像素相机22,高像素相机22通过支撑杆21安装在支架11的顶部,使得高像素相机22具有更广的识别范围。本实用新型的高空无损检测机器人100,采用小型无人机、视觉识别的方式和无损的检测理念,实现对化工等领域的压力容器上的各个部位焊缝进行自动识别、定位及自动超声探伤,具有成本低、机动速度快、效率高、检测范围广等优点。
30.在本实用新型中,检测机构3包括电机31、转动组件32和超声探伤组件33。无人机1包括支架11,支架11内形成有容置内腔111,支架11的上表面形成有操作口112。电机31安装于容置内腔111内,电机31的输出轴311伸出支架11外部并与转动组件32的一端转动连接,转动组件32的另一端与超声探伤组件33固定连接。当视觉识别机构2锁定焊缝位置之后,电机31的输出轴311进行圆周旋转,以带动转动组件32转动,进一步带动转动组件32另一端的超声探伤组件33对准焊缝,转动组件32驱动超声探伤组件33紧贴焊缝,实现焊缝的自动识别、定位及自动超声探伤。通过在支架11的上表面形成操作口112,能够增加支架11内部的散热效果、同时减少机器人100的整体质量,并且方便对无人机1进行检查和维修。超声探伤组件33包括发射端和接收端,发射端发射超声波到待检设备内部以检测是否存在异常,接收端接收设备内部结构异常信息或缺陷引起的热、声、光、电、磁等反应的变化信息,具有检测效率高的优点。
31.在本实用新型中,转动组件32包括支撑件321、弹性组件322和连接杆323;支撑件321的一端与电机31的输出轴311固定连接,支撑件321的另一端形成有滑动槽,滑动槽的长度方向与输出轴311垂直,连接杆323的一端伸进滑动槽内并与支撑件321滑动连接,连接杆323的另一端与超声探伤组件33固定连接;弹性组件322套接在连接杆323的外部,且弹性组件322的一端与支撑件321连接,弹性组件322的另一端与超声探伤组件33连接。当超声探伤组件33对准并抵顶焊缝后,连接杆323向滑动槽内运动并压缩弹性组件322,弹性组件322在压力作用下给超声探伤组件33一个向着焊缝的弹力,使得超声探伤组件33与焊缝紧密贴合,以提高检测、探伤的精准性。
32.在本实用新型中,无人机1还包括转动副12和旋翼组件13;转动副12的一端伸进容
置内腔111内并与支架11连接,转动副12的另一端与一对旋翼组件13转动连接。转动副12的一端伸进容置内腔111内并与支架11连接,旋翼组件13包括转动电机133、位于转动电机133一端的第一旋翼131和位于转动电机133另一端的第二旋翼132,转动电机133的轴线与转动副12的延伸方向互相垂直,第一旋翼131位于转动副12的上方,第一旋翼131的旋转平面与转动副12的延伸方向平行,第二旋翼132位于转动副12的下方,第二旋翼132的旋转平面也与转动副12的延伸方向平行,使得无人机的飞行更加稳定。
33.在本实用新型中,为了提高无人机1的飞行稳定性,无人机1的周围通过转动副12连接有3对所述旋翼组件13。为了进一步提高无人机1的飞行稳定性,相邻两个转动副12之间的夹角均为120
°
。
34.在本实用新型中,还包括电源及控制系统4,电源及控制系统4安装于容置内腔111内,视觉识别机构2、检测机构3和旋翼组件13均与电源及控制系统4电性连接。电源及控制系统4包括供电单元和控制单元,供电单元给无人机1、视觉识别机构2和检测机构3提供工作所需的动力,保证无人机1能够高空飞行、保证视觉识别机构2能够对焊缝进行拍摄识别,保证检测机构3能够圆周旋转;控制单元控制无人机1飞行、控制视觉识别机构2对存在问题的焊缝位置进行拍照识别、控制检测机构3圆周旋转以对准并紧贴焊缝进行探伤。
35.在本实用新型中,为了提高连接杆323在滑动槽内的滑动效果,弹性组件322为弹簧。
36.在本实用新型中,还包括控制无人机1飞行的遥控设备。检测人员站在地面站上,通过遥控设备控制无人机1飞到高空待检设备区域,以克服传统需要人工手持无损探伤设备在压力容器壁面移动的存在的弊端,不受检测范围的限制,更加安全便捷。
37.以上所述仅为本实用新型的优选实施例,凡跟本实用新型权利要求范围所做的均等变化和修饰,均应属于本实用新型权利要求的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。