1.本发明涉及光学系统设计技术领域,特别是涉及一种基于多初始点拟牛顿优化的低敏感度三反望远镜设计方法。
背景技术:
2.三反望远镜具有较大的成像视场,目前在天文观测、遥感等领域应用十分广泛。传统的三反望远镜系统设计方法一般从像差与光学结构参数出发,校正多种初级像差,得到具有良好像质的光学系统。但其往往公差过紧,系统的制造成本与加工、装配难度很大,系统抗扰动能力较弱。
3.基于以上问题,考虑设计出具有低装调敏感度的三反系统。目前光学系统的降敏方法主要有解析法和数值法。数值法应用较为普遍,它通常依赖于复杂的全局优化算法和大量的光线追迹过程来获得设计结果,主要包括整体优化法和光线入射角优化法。整体优化法通常的过程是基于初始结构构建多重结构,以模拟具有定量误差的光学系统的状态。通过全局优化功能来优化这组多重结构,去寻找一种最佳的设计方案。光线入射角优化法通过光学表面上具有代表性的光线(通常使用边缘光线)的入射角作为评估系统灵敏度的指标,同样通过全局优化功能来优化系统,达到低敏感度设计。解析法以像差理论为设计指导,对光学系统的整体性能进行优化设计。通常需要建立装调误差与其引起的波前差之间的量化解析关系,由此评估光学系统的制造性能,通过优化制造性能来实现低装调敏感度的设计。
4.传统的三反望远镜光学设计流程将系统性能优化和容差分配两个步骤隔离开来,光学设计优化过程不考虑由制造和装调误差引起的像质下降的影响,而仅追求最佳的设计性能。设计完成后,在进行公差分析时,其公差一般较为严格。严格的公差导致在光学系统的装调过程中,光学组件的装调误差会严重导致成像质量下降,性能退化严重。与软件设计出的性能相比,光学系统在投入使用后的良好性能更应该是光学设计人员所追求的最终目标。
技术实现要素:
5.针对传统的三反望远镜光学设计方法没有同时考虑系统性能和装调误差影响,导致三反望远镜光学系统的装调敏感度较高的问题,本发明提出一种基于多初始点拟牛顿优化的低敏感度三反望远镜设计方法,通过该方法设计得到的三反望远镜光学系统具有良好的像质与低装调敏感度。
6.针对三反望远镜系统,为解决上述问题,实现对其降失调敏感度的设计,本发明采取如下的技术方案:
7.一种基于多初始点拟牛顿优化的低敏感度三反望远镜设计方法,包括以下步骤:
8.步骤一:建立光学系统制造性能评估模型,所述光学系统制造性能评估模型的表达式为:
[0009][0010]
其中,a为三反望远镜系统的制造性能;为设计波像差,表示在视场h中光学系统设计时产生的均方根波像差的值;为失调波像差,表示由视场h中的装调误差引起的均方根波像差的值;
[0011]
步骤二:通过预估三反望远镜系统的公差范围给定所述光学系统制造性能评估模型中偏心值和倾角值,在视场h中选取用于计算波像差的视场点;
[0012]
步骤三:将所述光学系统制造性能评估模型以宏语言函数的形式写入zemax软件中,并求解出三反望远镜系统的失调波像差
[0013]
步骤四:将全部所述视场点的波像差取平均值,得到三反望远镜系统的设计波像差
[0014]
步骤五:将所述失调波像差表达式和所述设计波像差代入到所述光学系统制造性能评估模型中;
[0015]
步骤六:根据镜面半径、二次系数与镜间距之间的对应公式,将步骤五得到的光学系统制造性能评估模型中的镜面半径和二次系数用镜间距表示,得到仅以镜间距为变量的评估模型公式;
[0016]
步骤七:将每个镜间距等间隔分为若干个网格,形成若干个计算单元;
[0017]
步骤八:在每个所述计算单元内选择一个初始点,在matlab中调用fminunc函数对所述评估模型公式进行拟牛顿法优化,在设定的镜间距变化范围内求解出光学系统制造性能a的全局最优值,并求出所述全局最优值对应的镜间距,再根据求出的镜间距推导出三反望远镜系统的其余光学结构参数,优化后最终得到低失调敏感度的三反望远镜系统。
[0018]
与现有技术相比,本发明具有以下有益效果:
[0019]
本发明所提出的一种基于多初始点拟牛顿优化的低敏感度三反望远镜设计方法,通过建立包括系统设计残差以及镜面失调产生的波像差的光学系统制造性能评估模型,将该评估模型用镜间距表示,得到仅以镜间距为变量的评估模型公式,将该评估模型公式作为系统的优化指标,通过将每个镜间距等间隔分为若干个网格,形成若干个计算单元,再采用拟牛顿法对评估模型公式进行优化,以光学系统制造性能的最小值作为全局最优值,最终得到优化后的低失调敏感度的三反望远镜系统。本发明的三反望远镜设计方法在光学设计阶段将系统性能和装调误差影响同时考虑进来,使得优化后得到的三反望远镜系统同时具有良好像质与低失调灵敏度,与传统优化方法相比,本发明的三反望远镜系统制造性能更好,与现有的其余降敏方法相比,本发明提高了系统制造性能评估的准确性,而且本发明的设计方法不需要大量的光线追迹,只需要追迹近轴边缘光线和主光线即可完成,计算量小,时间短,优化速度快。
附图说明
[0020]
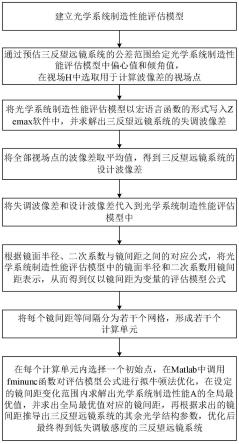
图1为本发明的一种基于多初始点拟牛顿优化的低敏感度三反望远镜设计方法的
流程图;
[0021]
图2为光学系统制造性能评估模型以及波像差计算所选取的视场点;
[0022]
图3为本发明中分割的计算单元的示意图;
[0023]
图4为三反望远镜的初始光学结构示意图;
[0024]
图5为采用传统优化方法优化后的三反望远镜光学结构示意图(a)和采用本发明中的制造性能多初始点拟牛顿优化法优化后的三反望远镜光学结构示意图(b);
[0025]
图6为采用传统优化方法优化后的结果图(a)和采用本发明中的制造性能多初始点拟牛顿优化法优化后的结果图(b)。
具体实施方式
[0026]
下面将结合附图及较佳实施例对本发明的技术方案进行详细描述。
[0027]
如图1所示,本发明提供一种基于多初始点拟牛顿优化的低敏感度三反望远镜设计方法,该方法包括以下步骤:
[0028]
步骤一:建立光学系统制造性能评估模型。
[0029]
本步骤选用波像差作为设计残差与装调误差的评价指标,建立光学系统制造性能评估模型,该评估模型用于评估三反望远镜的制造性能a。光学系统制造性能评估模型的表达式为:
[0030][0031]
其中,a为三反望远镜系统的制造性能;表示在视场h中光学系统设计时产生的均方根(rms)波像差的值,定义为设计波像差;表示由视场h中的装调误差引起的rms波像差的值,定义为失调波像差。设计波像差在系统优化过程中,可直接在光学设计软件中调取。因此建立光学系统制造性能评估模型的关键是获得失调波像差的表达式。
[0032]
在失调的光学系统中,镜面的偏心和倾斜主要引入视场不对称的彗差和像散,它们是导致光学系统在装调过程完成后引起像质下降的主要像差。
[0033]
在三反望远镜中,通常以主镜(pm)的位置作为参考,分析次镜(sm)和三镜(tm)的倾斜和偏心误差。这里选取了归一化fringe波前zernike多项式的四个主要低阶项的系数z5,z6,z7和z8,用以表征失调产生的彗差与像散。在每个装调误差单独作用的情况下,分别计算每项zernike多项式系数来得到失调波像差的贡献,并将其合成为系统的失调波像差失调波像差的具体公式由(2)给出:
[0034][0035]
其中,z5、z6、z7、z8为泽尼克多项式的系数,z5和z6为三阶像散,z7和z8为三阶彗差,公式中下标t代表倾斜误差引入的像差,下标d代表偏心误差引入的像差。
[0036]
失调引起的三阶像散z5和z6、三阶彗差z7和z8均与倾斜和偏心误差密切相关。这些
zernike多项式项可以被表达为关于视场(fov)和光学结构参数的形式,即失调波像差可以通过光学结构参数来表示,继而通过调节光学结构参数来控制由失调引起的波像差。下面将推导出z
5,d
,z
5,t
,z
6,d
,z
6,t
,z
7,d
,z
7,t
,z
8,d
和z
8,t
的具体表达式。
[0037]
当光学元件失调后,像差场中心将发生偏移,这时我们要引入矢量像差理论(nodal aberration theory,nat)。矢量像差理论主要研究的是当光学系统元件存在倾斜和偏心的情况时光学系统的像差情况。失调状态下,根据赛德尔系数与归一化zernike系数(考虑前九项)的关系,基于nat的三阶彗差可由下式给出:
[0038][0039]
其中,和分别为失调引入的彗差矢量的x分量和y分量,和的表达式如下:
[0040][0041]
其中,w
131,sph,sm
为次镜彗差波像差系数球面分量,w
131,asph,sm
为次镜彗差波像差系数非球面分量,w
131,sph,tm
为三镜彗差波像差系数球面分量,w
131,asph,tm
为三镜彗差波像差系数非球面分量,为次镜的像差场偏移矢量球面x轴分量,为次镜的像差场偏移矢量非球面x轴分量,为次镜的像差场偏移矢量球面y轴分量,为次镜的像差场偏移矢量非球面y轴分量,为三镜的像差场偏移矢量球面x轴分量,为三镜的像差场偏移矢量非球面x轴分量,为三镜的像差场偏移矢量球面y轴分量,为三镜的像差场偏移矢量非球面y轴分量。
[0042]
当系统孔径光阑位于主镜上时,三反望远镜系统的次镜像差场偏移矢量和三镜像差场偏移矢量分别如公式(5)和(6)所示。
[0043]
次镜像差场偏移矢量:
[0044]
[0045]
三镜像差场偏移矢量:
[0046][0047]
其中,xde
sm
为次镜x轴方向偏心误差,yde
sm
为次镜y轴方向偏心误差,ade
sm
为次镜绕x轴倾斜误差,bde
sm
为次镜绕y轴倾斜误差,xde
tm
为三镜x轴方向偏心误差,yde
tm
为三镜y轴方向偏心误差,ade
tm
为三镜绕x轴倾斜误差,bde
tm
为三镜绕y轴倾斜误差,u
pm
为主镜近轴主光线入射角,d1为主镜和次镜之间的距离,d2为次镜和三镜之间的距离,r1为主镜的曲率半径,r2为次镜的曲率半径,r3为三镜的曲率半径。上述xde
sm
、yde
sm
、ade
sm
、bde
sm
、xde
tm
、yde
tm
、ade
tm
、bde
tm
的定义与codev11.5中decenter andreturn定义一致。
[0048]
此外,三反望远镜的彗差波像差系数(w
131,sph,sm
,w
131,asph,sm
,w
131,sph,tm
和w
131,asph,tm
)可由赛德尔公式计算,计算公式如下:
[0049][0050]
其中,y1为主镜边缘光线入射高度,b
s2
为次镜的二次系数,b
s3
为三镜的二次系数。
[0051]
将公式(4)-(7)带入公式(3)中,可以得到zernike系数z7和z8项,在公式(5)和(6)中,令ade
sm
、ade
tm
和bde
sm
、bde
tm
为0,可以得到只存在偏心失调时的彗差即z
7,d
和z
8,d
,令xde
sm
、xde
tm
和yde
sm
、yde
tm
为0,可以得到只存在倾斜失调时的彗差即z
7,t
和z
8,t
。
[0052]
类似的,在失调状态下,基于nat的三阶像散可由下式给出:
[0053]
[0054]
其中,和分别为失调引入的彗差矢量的x分量和y分量,和的表达式如下:
[0055][0056]
其中,w
222,sph,sm
为次镜像散波像差系数球面分量,w
222,asph,sm
为次镜像散波像差系数非球面分量,w
222,sph,tm
为三镜像散波像差系数球面分量,w
222,asph,tm
为三镜像散波像差系数非球面分量。
[0057]
此外,三反望远镜的像散波像差系数(w
222,sph,sm
,w
222,asph,sm
,w
222,sph,tm
和w
222,asph,tm
)可由赛德尔公式计算,计算公式如下:
[0058][0059]
将公式(5)、(6)、(9)和(10)代入公式(8)中,可以得到zernike系数z5和z6项,即得到三阶像散z5和z6。在公式(5)和(6)中,令ade
sm
、ade
tm
和bde
sm
、bde
tm
为0,可以得到只存在偏心失调时的像散,即z
5,d
和z
6,d
。令xde
sm
、xde
tm
和yde
sm
、yde
tm
为0,可以得到只存在倾斜失调时的像散,即z
5,t
和z
6,t
。至此已经推导出了失调波像差的具体表达式,并将其表示为关于光学结构参数的形式。
[0060]
步骤二:通过预估三反望远镜系统的公差范围给定光学系统制造性能评估模型中偏心值和倾角值。优选地,偏心值可以设置为0.1mm,倾角值可以设置为1.5
′
。并且,在视场h中选取用于计算波像差的视场点,选取的视场点如图2所示,图中以黑点表示视场点,分别为(-1,1)、(0,1)、(-1,0)、(0,0)、(-1,-1)、(0.-1)。
[0061]
步骤三:将光学系统制造性能评估模型以宏语言函数的形式写入zemax软件中,并根据失调波像差的计算公式(2)在zemax软件求解出三反望远镜系统的失调波像差
[0062]
步骤四:将全部视场点的波像差取平均值,得到三反望远镜系统的设计波像差
[0063]
步骤五:将步骤三得到的失调波像差和步骤四得到的设计波像差代入到光学系统制造性能评估模型中,得到三反望远镜系统的制造性能a。
[0064]
步骤六:根据镜面半径、二次系数与镜间距之间的对应公式,将步骤五得到的光学系统制造性能评估模型中的镜面半径和二次系数用镜间距表示,从而得到仅以镜间距为变量的评估模型公式。在本步骤中,镜面半径、二次系数与镜间距之间的对应公式在论文“z.gu,y.wang,and c.yan,“analytical design method of three-mirror anastigmatic telescope withmirror spacings as free design arameters,”j.astron.telesc.instrum.syst.6(04),044007(2020).”中详细公开,此处不再赘述。
[0065]
步骤七:将每个镜间距等间隔分为若干个网格,形成若干个计算单元。例如,可以将每个镜间距等间隔分割为10个网格,如图3所示,图中d1、d2、d3分别表示主镜和次镜之间的距离、次镜和三镜之间的距离、三镜和平面反射镜之间的距离。
[0066]
步骤八:在matlab中调用中等规模fminunc函数来实现制造性能多初始点-拟牛顿法优化。具体地,在每个计算单元内选择一个初始点,在matlab中调用fminunc函数对步骤六得到的评估模型公式进行拟牛顿法优化,在设定的镜间距变化范围(例如镜间距变化范围为各自距离的
±
10%)内求解出光学系统制造性能a的全部结果,并在全部结果中取其最小值作为全局最优值,然后求出全局最优值对应的镜间距,再根据求出的镜间距推导出三反望远镜系统的其余光学结构参数(包括镜面半径和二次系数),优化后最终得到低失调敏感度的三反望远镜系统。
[0067]
进一步地,基于多初始点拟牛顿优化的低敏感度三反望远镜设计方法还包括以下步骤:
[0068]
步骤九:基于蒙特卡洛法对优化后得到的三反望远镜系统的装调性能进行分析,以预测优化后得到的三反望远镜系统的装调性能。
[0069]
本发明所提出的一种基于多初始点拟牛顿优化的低敏感度三反望远镜设计方法,通过建立包括系统设计残差以及镜面失调产生的波像差的光学系统制造性能评估模型,将该评估模型用镜间距表示,得到仅以镜间距为变量的评估模型公式,将该评估模型公式作为系统的优化指标,通过将每个镜间距等间隔分为若干个网格,形成若干个计算单元,再采用拟牛顿法对评估模型公式进行优化,以光学系统制造性能的最小值作为全局最优值,最终得到优化后的低失调敏感度的三反望远镜系统。本发明的三反望远镜设计方法在光学设计阶段将系统性能和装调误差影响同时考虑进来,使得优化后得到的三反望远镜系统同时具有良好像质与低失调灵敏度,与传统优化方法相比,本发明的三反望远镜系统制造性能更好,与现有的其余降敏方法相比,本发明提高了系统制造性能评估的准确性,而且本发明的设计方法不需要大量的光线追迹,只需要追迹近轴边缘光线和主光线即可完成,计算量小,时间短,优化速度快。
[0070]
下面以具体的三反望远镜系统设计实例来对本发明的效果进行详细说明
[0071]
将一个f/20、通光口径6.6m的视场偏轴型三反望远镜用作参考系统。其系统参数见表1,初始光学结构如图4所示,三反望远镜系统包括主镜1、次镜2、三镜3和平面反射镜4,平行光入射后到达主镜1,经主镜1反射后达到次镜2,经次镜2反射后达到三镜3,经三镜3反射后达到平面反射镜4,经平面反射镜4反射后到达像面5。全视场为0.3
°×
0.15
°
,视场偏角为0.2
°
。望远镜的孔径光阑位于主镜1上,主镜1、次镜2和三镜3的旋转对称轴重合。在三镜3
[0084]
为了评估和比较不同优化结果的失调灵敏度,下面基于蒙特卡洛法对优化后得到的三反望远镜系统的装调性能进行分析。采用2000个样本的蒙特卡洛容差分析方法来预测装调性能。将次镜以及三镜的偏心和倾斜量作为系统装调公差,公差是均匀分布的。在公差分析中,每个表面的x和y方向的偏心公差最大值设置为0.1mm,x和y轴倾斜公差最大值设置为1.5
′
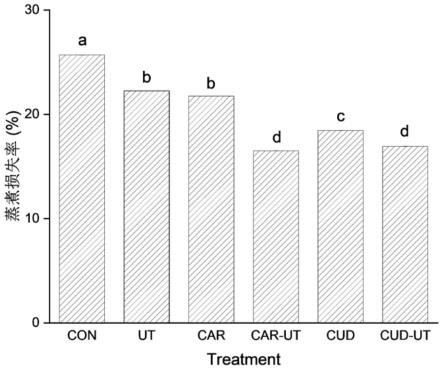
,计算波长为587.6nm。同时将像面位置作为补偿器。对2000个蒙特卡洛样本的全视场平均波像差进行了统计分析,分析结果见表4和图6。
[0085]
表4优化结果比较
[0086] 传统优化(波)制造性能多初始点拟牛顿优化法(波)名义值0.0260.042均值0.8700.754中位数0.8380.738最大值2.0471.905均方根误差0.9340.793
[0087]
从图6以及表4中可以看出,经传统方法优化后的光学系统的装调性能下降严重。镜间距变化范围10%条件下,本发明中光学系统制造性能评估模型优化方法结果的波前误差名义值为传统优化方法结果的1.6倍,而波前差均方根误差(rmse)为传统优化方法结果的84%,中位数为传统优化方法结果的88%。对比分析结果表明,本发明中的制造性能多初始点拟牛顿优化法较传统优化方法有更低的失调敏感度,基于制造性能多初始点拟牛顿优化的三反望远镜的成像质量与装调敏感度更优。
[0088]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0089]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。