一种快速划分mura区域的节省内存的补偿方法
技术领域
1.本发明涉及显示器件技术领域,特别是基于tft-oled显示屏的mura补偿领域,具体地,涉及一种快速划分mura区域的节省内存的补偿方法。
背景技术:
2.amoled作为一种高性能显示器件,以其自发光、对比度高等特性,已经越来越被广泛的使用。tft是amloed显示技术中最重要最基础的器件,但是由于设备工艺的限制,不同位置的tft常常在阈值电压、迁移率等电学参数上具有非均匀性,这种非均匀性会转化为amoled显示器件的电流差异和亮度差异,从而出现amoled显示屏画面显示亮度不均的现象,即mura现象。这种显示不均匀会导致amoled显示器的显示品质下降,降低用户的使用体验。
3.为了解决上述问题,通常采用外部补偿的办法即demura技术。具体为显示器在显示不同灰阶的亮度画面后使用光学ccd相机获取像素亮度值,利用demura算法产生mura补偿数据并进行存储,当显示器显示画面时利用其实现亮度均匀性补偿,解决显示器画面亮度不均匀的问题。
4.现行的补偿办法一般是按照2*2或者4*4的像素点作为最小单位来求取均值,再进行gamma曲线拟合,利用demura算法计算出demura数据最终达到亮度补偿的目的。以4*4像素为单位的补偿算法为例,对16个像素点求取均值的办法受单个像素点亮度异常值的影响很大,即如果内部像素亮度差异较大,这种方案并不能很好地改善屏幕亮度均匀性。如果减小单位像素数量,采用2*2,甚至1*1像素为单位进行补偿,会产生大量的补偿数据,这对于数据存储提出了很大的挑战。
5.此外,上述方案是在整个显示区域按照最小单位进行采样或计算,并不能准确的识别mura区域而进行有效的补偿,造成了大量的计算资源和存储资源浪费。
技术实现要素:
6.针对现有技术中的缺陷,本发明的目的是提供一种快速划分mura区域的节省内存的补偿方法。
7.根据本发明的一个方面,提供一种快速划分mura区域的节省内存的补偿方法,包括:
8.对显示器区域以亮度均匀性为指标,对于符合所述亮度均匀性要求的非mura区域进行大像素区域的划分,对于不符合所述亮度均匀性要求的mura区域进行小像素区域划分,获得若干个具有亮度一致性mura和非mura子区域;
9.基于所述子区域进行拟合处理,获得拟合参数信息;
10.基于所述子区域和所述拟合参数信息,完成显示画面补偿。
11.优选地,所述对显示器区域进行划分,获得若干个具有亮度一致性的子区域,包括:使用外部光学仪器得到显示器的各个像素的灰度-亮度数据后,进行像素区域划分;
12.分别计算各区域内亮度均值和方差;
13.判断所述方差是否超出设定的阈值范围;
14.如果超出所述阈值范围,则将对应的区域再次进行子区域划分并计算划分后的各个区域的均值与方差;
15.重复上述步骤,直至每个子区域内的方差达到设定的阈值范围后停止子区域划分。
16.优选地,所有子区域完成划分后,记录每个子区域的位置信息和亮度均值。
17.优选地,所述外部光学仪器得到显示器的各个像素灰度-亮度数据,包括:外部光学仪器拍摄获得显示器不同灰阶下各个像素pixel的亮度值;
18.所述灰阶采样按照16,32.64,96,128,160,180,200,220,240,255进行采样。
19.优选地,单个灰阶下的显示器子像素亮度构成m
×
n的矩阵后,对像素区域进行子区域划分,每个子区域像素亮度矩阵大小为m(i)
×
n(i);
20.计算每个子区域内总体的亮度均值a(i)和方差s(i),并记录子区域的位置px(i)和py(i),该子区域在显示屏的位置为[px(i),py(i)]-[px(i) m(i),py(i) n(i)],其均值为a(i),方差为s(i);
[0021]
设定总体区域方差阈值,判断子区域的方差值是否超出阈值,若超出则对该区域继续实行下一层的子区域划分,计算下一层划分过后获得的各个子区域均值方差及位置。
[0022]
优选地,所述基于子区域进行处理拟合处理,获得拟合参数信息,包括:
[0023]
利用划分后的子区域的所述亮度均值进行灰阶-亮度的gamma曲线拟合,获得拟合的子区域gamma曲线;(显示器的mura区域一般随着灰度变化不会发生明显变化,因此不同灰度下划分结果是一样的;总体区域的在特定灰度下的亮度均值作为目标值,所有灰阶下目标值拟合成目标曲线。然后子区域同理,只是以子区域内亮度均值在不同灰阶下进行曲线拟合,最终试图将子区域的曲线尽量靠近目标曲线)
[0024]
基于所述拟合的子区域gamma曲线,与目标gamma曲线相应灰阶下的亮度值比较并计算差值;
[0025]
将得到的所述差值数据进行多项式拟合,记录拟合后的参数信息。
[0026]
优选地,所述gamma曲线的拟合包括但不限于最小二乘法。
[0027]
优选地,所述拟合的子区域gamma曲线为f(x)=a
×
xb;
[0028]
所述目标gamma曲线为tar(x)=c
×
xd;
[0029]
计算所述拟合的gamma曲线对应的区域亮度与目标区域的亮度差值;
[0030]
对所有灰阶下的差值进行多项式拟合得到补偿公式d(x,i)=u
×
x(i) v
×
x(i)2 w
×
x(i)3,其中i代表不同的子区域,x代表灰阶值,u,v,w为拟合参数。
[0031]
优选地,所述基于所述子区域和所述拟合参数信息,完成显示画面补偿,包括:对显示画面进行补偿时,根据记录的子区域的位置信息及拟合参数信息,计算出各个子区域的补偿数据,将补偿数据与应用端送来的数据叠加生成新的数据最终进行显示。
[0032]
优选地,所述位置信息参数和补偿信息参数进行存储;
[0033]
待需要补偿时,提取出各个子像素点的位置信息(包括初始坐标信息和像素矩阵的大小信息)及对应的补偿公式的系数;
[0034]
根据对应的灰阶信息分别计算出补偿值并分配到不同的子区域,
[0035]
将补偿数据与应用端送来的数据叠加;
[0036]
生成新的数据进行显示。
[0037]
与现有技术相比,本发明具有如下的有益效果:
[0038]
本发明实施例中的一种快速划分mura区域的节省内存的补偿方法,很好地解决了固定区域采样亮度均匀性的问题;其通过计算子区域的方差值来判断是否进一步进行子区域的拆分,可以使该区域内的亮度一致性达到规定的要求,方便地解决了传统的固定大小区域如2
×
2子像素为最小单位采样实现亮度补偿所带来的均匀性较差的问题。
[0039]
本发明实施例中的一种快速划分mura区域的节省内存的补偿方法,在保证亮度补偿均匀性的前提下节省了内存资源;其通过区域划分可以使亮度差异不大的区域占用的内存资源大幅减少,而对于亮度差异较大的mura区域进行子区域划分达到更加精确的亮度补偿,在保证亮度均匀性的前提下尽可能的占用更少的内存资源。
附图说明
[0040]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0041]
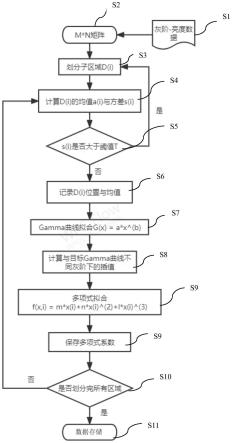
图1为本发明实施例中的一种快速划分mura区域的节省内存的补偿方法的流程图。
具体实施方式
[0042]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
[0043]
本发明提供一个实施例,一种快速划分mura区域的节省内存的补偿方法,包括:
[0044]
s100,对显示器区域以亮度均匀性为指标,对于符合所述亮度均匀性要求的非mura区域进行大像素区域的划分,对于不符合所述亮度均匀性要求的mura区域进行小像素区域划分,获得若干个具有亮度一致性mura和非mura子区域;
[0045]
s200,基于s100获得的若干个子区域进行拟合处理,获得拟合参数信息;
[0046]
s300,基于s100获得的子区域和s200获得的拟合参数信息,完成显示画面补偿。
[0047]
在本发明的一个优选实施例中,执行s100。ccd相机得到显示器各个像素灰度-亮度数据后先进行像素区域划分,分别计算各区域内亮度均值和方差,再判断方差是否超出设定的阈值。如果超出范围则对该区域再次进行子区域划分并计算划分后的各个区域的均值与方差。重复上述步骤,直至每个子区域内的方差达到设定的阈值后停止子区域划分,记录划分后的每个区域的位置信息和均值,至此完成显示器mura区域的快速划分。
[0048]
在发明的另一个优选实施例中,基于s100划分获取的子区域,实施s200。利用划分后的子区域的平均亮度值进行灰阶-亮度的子区域gamma曲线拟合,与目标gamma曲线相应灰阶下的亮度值比较并计算差值,将得到的差值数据再次进行多项式拟合,记录拟合后的参数信息。
[0049]
在本发明的另一个优选实施例中,基于s100获取的子区域以及s200得到的参数信
息,实施s300。
[0050]
当需要对显示画面进行补偿时,可以根据记录的子区域的位置信息及拟合参数信息,计算出各个子区域的补偿数据,最终实现demura数据表的更新,即将补偿数据与应用端送来的数据叠加生成新的数据最终进行显示。。
[0051]
如图1所示,为本发明提供的另一个优选的实施例中的一种快速划分mura区域的节省内存的补偿方法的流程图。
[0052]
s1,通过外部光学仪器如ccd相机拍摄获得显示器不同灰阶下各个像素pixel的亮度值,灰阶采样可按照16,32,64,96,128,160,180,200,220,240,255进行采样。由于高灰阶下亮度数据的差异性较大,因此按照上述方式采样可以尽可能得到精准的gamma曲线。
[0053]
s2,单个灰阶下的显示器子像素亮度构成m
×
n的矩阵后,对m
×
n像素区域首次进行子区域大小为2m×2n
(m,n=1,2,3
…
的区域划分,后续划分方式为在原来每个子区域的基础上均匀划分为2
×
2个大小相同的子区域,获得子区域d(i)每个子区域像素亮度矩阵大小为m(i)
×
n(i);其中,m、n视整体像素大小而定,本实施例取5或6为宜,方便后续子区域的进一步划分。若全体像素行列像素值大小不是2m或2n的倍数,则复制最后一行或最后一列进行补充;
[0054]
s3,计算子区域内总体的均值a(i)和方差s(i),并记录子区域的位置px(i)和py(i)。则该区域在显示屏的位置为[px(i),py(i)]-[px(i) m(i),py(i) n(i)],其均值为a(i),方差为s(i)。
[0055]
s4,设定总体区域方差阈值,判断子区域的方差值是否超出阈值,若超出则返回s2对该区域进一步实行子区域划分,计算各个子区域均值方差及位置。重复上述步骤直至各个子区域的方差达到要求;
[0056]
s5,记录此时所有子区域d(i)的位置及均值信息。
[0057]
s6,区域划分完成后,针对每个子区域按照采样灰阶进行子区域gamma曲线的拟合,曲线的拟合包括但不限于最小二乘法等。拟合后得到各个子区域的曲线方程:f(x)=a
×
xb;
[0058]
s7,若目标gamma曲线为tar(x)=c
×
xd,则计算该区域亮度与目标区域的亮度差值;
[0059]
s8,再次对所有灰阶下的差值进行多项式拟合得到补偿公式d(x,i)=u
×
x(i) v
×
x(i)2 w
×
x(i)3,其中i代表不同的子区域,x代表灰阶值,u,v,w为拟合参数。每个区域对应一组拟合参数,该拟合参数记为补偿信息参数。
[0060]
s9,保存每个子区域的补偿信息参数。
[0061]
s10,判断是否分完所有区域,若否,则返回s3;若是,则进入s11;
[0062]
s11,将上述s5中得出的位置信息参数和s8中得到的拟合参数进行储存;
[0063]
s12,待需要补偿时,提取出各个子像素区域的位置信息(包括起始坐标信息和像素矩阵的大小信息)及对应的补偿信息参数。根据对应的灰阶信息分别计算出补偿值并分配到不同的子区域,将补偿数据与应用端送来的数据叠加生成新的数据进行显示。此处的应用端送来的数据可理解为显示器每个像素点的实时亮度值。
[0064]
其中,每个子区域的左上角第一个像素坐标记为起始坐标。拟合参数为每个划分好的子区域对应一组,而每个子区域亮度值包含不同灰阶下的数据,首先确定子区域意味
着已经确定好了拟合参数,再确定具体灰阶值即可计算出相应的亮度补偿值,用于更新显示。
[0065]
需要说明的是,本发明提供的所述方法中的步骤,可以利用所述系统中对应的模块、装置、单元等予以实现,本领域技术人员可以参照所述系统的技术方案实现所述方法的步骤流程,即,所述系统中的实施例可理解为实现所述方法的优选例,在此不予赘述。
[0066]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0067]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。上述各优选特征在互不冲突的情况下,可以任意组合使用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。