技术特征:
1.一种机器人碰撞检测方法,其中,该方法包括:在环境地图中建立多边形的机器人底盘的模型,将环境地图中的多边形的机器人底盘的模型进行像素化;建立环境地图中的各个旋转角度下的像素化的多边形的机器人底盘的模型,将环境地图中的各个旋转角度下的像素化的多边形的机器人底盘的模型存储入查找表;获取机器人实际移动的距离和旋转角度,基于机器人的实际旋转角度,从所述查找表中获取环境地图中的对应旋转角度下的像素化的多边形的机器人底盘的模型;获取环境地图中的障碍物的位置,基于环境地图中的障碍物的位置和机器人移动的距离,判断障碍物的位置是否与获取到的环境地图中的对应旋转角度下的像素化的多边形的机器人底盘的模型中的某个像素是否发生重叠,若发生重叠,则判断障碍物与机器人发生碰撞,若未发生重叠,则判断障碍物与机器人未发生碰撞。2.根据权利要求1所述的方法,其中,建立环境地图中的各个旋转角度下的像素化的多边形的机器人底盘的模型,将环境地图中的各个旋转角度下的像素化的多边形的机器人底盘的模型存储入查找表,包括:对于旋转角度0~360度,每0.5度离散化一次,离散化为720个旋转角度下的像素化的多边形的机器人底盘的模型;将720个旋转角度下的像素化的多边形的机器人底盘的模型存储入查找表。3.根据权利要求2所述的方法,其中,将720个旋转角度下的像素化的多边形的机器人底盘的模型存储入查找表,包括:分别建立720个旋转角度中每个旋转角度的索引;将每个索引和每个索引对应的旋转角度下的像素化的多边形的机器人底盘的模型。4.根据权利要求3所述的方法,其中,在分别建立720个旋转角度中每个旋转角度的索引,包括:根据如下公式建立分别建立720个旋转角度中每个旋转角度的索引:其中,theta表示某个旋转角度,idx表示某个旋转角度对应索引。5.根据权利要求1所述的方法,其中,获取环境地图中的障碍物的位置,基于环境地图中的障碍物的位置和机器人移动的距离,判断障碍物的位置是否与获取到的环境地图中的对应旋转角度下的像素化的多边形的机器人底盘的模型中的某个像素是否发生重叠,包括:获取环境地图中的障碍物的位置和获取到的环境地图中的对应旋转角度下的像素化的多边形的机器人底盘的模型的原始位置;基于机器人移动的距离在环境地图中将障碍物的位置移动相同距离;判断环境地图中移动后的障碍物的位置是否与获取到的环境地图中的在原始位置的对应旋转角度下的像素化的多边形的机器人底盘的模型中的某个像素是否发生重叠。6.一种机器人碰撞检测设备,其中,该设备包括:第一装置,用于在环境地图中建立多边形的机器人底盘的模型,将环境地图中的多边形的机器人底盘的模型进行像素化;第二装置,用于建立环境地图中的各个旋转角度下的像素化的多边形的机器人底盘的
模型,将环境地图中的各个旋转角度下的像素化的多边形的机器人底盘的模型存储入查找表;第三装置,用于获取机器人实际移动的距离和旋转角度,基于机器人的实际旋转角度,从所述查找表中获取环境地图中的对应旋转角度下的像素化的多边形的机器人底盘的模型;第四装置,用于获取环境地图中的障碍物的位置,基于环境地图中的障碍物的位置和机器人移动的距离,判断障碍物的位置是否与获取到的环境地图中的对应旋转角度下的像素化的多边形的机器人底盘的模型中的某个像素是否发生重叠,若发生重叠,则判断障碍物与机器人发生碰撞,若未发生重叠,则判断障碍物与机器人未发生碰撞。7.根据权利要求6所述的设备,其中,所述第二装置,用于对于旋转角度0~360度,每0.5度离散化一次,离散化为720个旋转角度下的像素化的多边形的机器人底盘的模型;将720个旋转角度下的像素化的多边形的机器人底盘的模型存储入查找表。8.根据权利要求7所述的设备,其中,所述第二装置,用于分别建立720个旋转角度中每个旋转角度的索引;将每个索引和每个索引对应的旋转角度下的像素化的多边形的机器人底盘的模型。9.根据权利要求8所述的设备,其中,所述第二装置,用于根据如下公式建立分别建立720个旋转角度中每个旋转角度的索引:其中,theta表示某个旋转角度,idx表示某个旋转角度对应索引。10.根据权利要求6所述的设备,其中,所述第四装置,用于获取环境地图中的障碍物的位置和获取到的环境地图中的对应旋转角度下的像素化的多边形的机器人底盘的模型的原始位置;基于机器人移动的距离在环境地图中将障碍物的位置移动相同距离;判断环境地图中移动后的障碍物的位置是否与获取到的环境地图中的在原始位置的对应旋转角度下的像素化的多边形的机器人底盘的模型中的某个像素是否发生重叠。11.一种基于计算的设备,其中,包括:处理器;以及被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器:在环境地图中建立多边形的机器人底盘的模型,将环境地图中的多边形的机器人底盘的模型进行像素化;建立环境地图中的各个旋转角度下的像素化的多边形的机器人底盘的模型,将环境地图中的各个旋转角度下的像素化的多边形的机器人底盘的模型存储入查找表;获取机器人实际移动的距离和旋转角度,基于机器人的实际旋转角度,从所述查找表中获取环境地图中的对应旋转角度下的像素化的多边形的机器人底盘的模型;获取环境地图中的障碍物的位置,基于环境地图中的障碍物的位置和机器人移动的距离,判断障碍物的位置是否与获取到的环境地图中的对应旋转角度下的像素化的多边形的机器人底盘的模型中的某个像素是否发生重叠,若发生重叠,则判断障碍物与机器人发生碰撞,若未发生重叠,则判断障碍物与机器人未发生碰撞。12.一种计算机可读存储介质,其上存储有计算机可执行指令,其中,该计算机可执行
指令被处理器执行时使得该处理器:在环境地图中建立多边形的机器人底盘的模型,将环境地图中的多边形的机器人底盘的模型进行像素化;建立环境地图中的各个旋转角度下的像素化的多边形的机器人底盘的模型,将环境地图中的各个旋转角度下的像素化的多边形的机器人底盘的模型存储入查找表;获取机器人实际移动的距离和旋转角度,基于机器人的实际旋转角度,从所述查找表中获取环境地图中的对应旋转角度下的像素化的多边形的机器人底盘的模型;获取环境地图中的障碍物的位置,基于环境地图中的障碍物的位置和机器人移动的距离,判断障碍物的位置是否与获取到的环境地图中的对应旋转角度下的像素化的多边形的机器人底盘的模型中的某个像素是否发生重叠,若发生重叠,则判断障碍物与机器人发生碰撞,若未发生重叠,则判断障碍物与机器人未发生碰撞。
技术总结
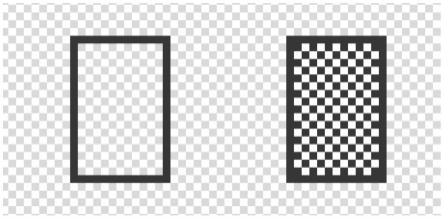
本发明的目的是提供一种机器人碰撞检测方法及设备,通过在环境地图中建立多边形的机器人底盘的模型,将左边的机器人的模型像素化,转化成右边的模型,这样碰撞检测只需要读取像素值,时间复杂度变为O1。同时,由于机器人在不断运动,这里会遇到像素化后的模型转化的问题,本发明设计一种角度离散化得方法,通过建立环境地图中的各个旋转角度下的像素化的多边形的机器人底盘的模型,将环境地图中的各个旋转角度下的像素化的多边形的机器人底盘的模型存储入查找表,以对角度进行离散化,这样构建有限个模型,当机器人旋转的情况下通过角度表格查找的方法,可以实时进行机器人的碰撞检测,改善机器人通过性。改善机器人通过性。改善机器人通过性。
技术研发人员:刘智杰 白静 庞梁
受保护的技术使用者:上海思岚科技有限公司
技术研发日:2022.06.13
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。