技术特征:
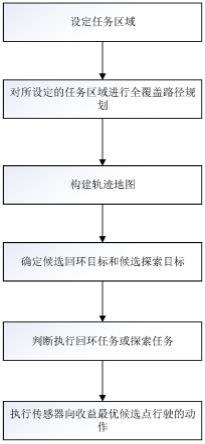
1.一种智慧城市传感器探测主动同步定位与建图方法,其特征在于,包括以下步骤:(1)设定任务区域;(2)对所设定的任务区域进行全覆盖路径规划;(3)执行传感器同步定位与地图绘制,并构建轨迹地图map
t
;(4)根据轨迹地图确定候选回环目标和候选探索目标;(5)根据效用方程计算到达每个候选点的收益,选择对应收益最优的候选点,根据传感器向收益最优候选点行驶的动作n
*
,判断执行回环任务或探索任务;(6)执行传感器向收益最优候选点行驶的动作n
*
,判断设定的任务区域是否探索完成;若完成探索,则结束;否则,返回步骤(3)。2.根据权利要求1所述的一种智慧城市传感器探测主动同步定位与建图方法,其特征在于,所述步骤(4)包括:(4.1)根据传感器测线的平均宽度j将轨迹地图map
t
分成子地图集合;(4.2)提取传感器当前位置(x,y)和位置协方差矩阵ξ(4.3)确定候选点搜索半径:(4.4)搜索半径e内的所有子地图sub
i
,计算子地图的数量num,(4.5)计算子地图的数据矩阵的行列值z
i
,a
i
;(4.6)采集对应位置(n,o)的地形高程u
no
;(4.7)计算在搜索半径e内的所有子地图的地形费舍尔信息量{g
i
|i=1,2,
…
,num}||
·
||表示欧式范数;(4.8)提取预设的地形费舍尔信息量阈值g
t
;(4.9)取所有满足g
i
>g
t
的子地图中心点作为回环目标点集合根据当前传感器位置到回环目标的距离,在前进方向上选取相同距离的点作为探索目标点,生成探索目标点集合;(4.10)输出回环候选点集合和探索候选点集合。3.根据权利要求1所述的一种智慧城市传感器探测主动同步定位与建图方法,其特征在于,所述步骤(5)具体为:(5.1)计算受动作n
′
影响的地图体积i
n
′
;(5.2)计算受到每个重访动作相应探索行动影响的地图体积i
ex
;(5.3)计算系统平衡因子τ,(5.4)提取历史控制向量的集合h和历史观测集合m;(5.5)提取执行动作n
′
而探测得到的地图信息z(n
′
);z表示某一栅格的地图信息;
(5.6)计算通过预测得到的到达目标点时传感器的位置协方差当前时刻传感器的位置协方差(5.7)采集目标子地图sub
i
的地形费舍尔信息量g
i
和搜索范围内最大的地形费舍尔信息量g
max
;(5.8)计算执行动作n
′
后传感器的位姿不确定性(5.9)计算栅格z的香农熵:(5.10)计算栅格z的瑞利熵:(5.10)计算栅格z的瑞利熵:(5.11)执行动作n
′
时的互信息v
n
′
:(5.12)计算到达每个候选点的收益τv
n
′
;(5.13)选择收益最优时传感器向对应的候选点行进的动作n
*
技术总结
本发明属于城市定位与导航技术领域,具体涉及一种智慧城市传感器探测主动同步定位与建图方法。本发明包括(1)设定任务区域;(2)对所设定的任务区域进行全覆盖路径规划;(3)执行传感器同步定位与地图绘制,并构建轨迹地图Map
技术研发人员:ꢀ(74)专利代理机构
受保护的技术使用者:哈尔滨工程大学
技术研发日:2022.06.12
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。