1.本发明涉及医疗器械技术领域,尤其涉及一种假肢病人康复护理用智能化辅助系统及其使用方法。
背景技术:
2.假肢就是用工程技术的手段和方法,为弥补截肢者或肢体不完全缺损的肢体而专门设计和制作装配的人工假体,又称“义肢”。它的主要作用是代替失去肢体的部分功能,使截肢者恢复一定的生活自理和工作能力。其适用对象是因疾病、交通事故、工伤事故、运动创伤等原因的截肢者。
3.在病人进行安装假肢时需要医务人员对病人的下肢进行一定程度的康复训练,其中康复训练包括:关节活动训练、肌力训练、负重训练等,但是现有技术中康复训练的过程中需要医务人员的协助方可完成病人的康复训练,在康复训练的过程中工作人员需要不断掰动病人的小腿、大腿促使病人的关节与肌肉进行训练,负重训练需要使病人的残端触摸棉层,使残端慢慢适应外界的压力,便于后期安装假肢,而病人的关节活动训练、肌力训练、负重训练使是分开进行,进而不但增加医务人员的工作强度还影响康复训练的效率。
技术实现要素:
4.本发明的目的是为了解决现有技术中需要工作人员不断掰动病人的小腿、大腿促使病人的关节与肌肉进行训练,关节活动训练、肌力训练、负重训练使是分开进行的问题,而提出的一种结构紧凑的一种假肢病人康复护理用智能化辅助系统及其使用方法。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种假肢病人康复护理用智能化辅助系统,包括康复椅,所述康复椅的一侧设有两个安置筒,所述康复椅内设有转动槽,所述康复椅的顶部一侧固定连接有控制面板;
7.所述转动槽内设有用于使病人大腿向两侧转动的转动组件;
8.所述转动槽内设有用于使安置筒转动的膝关节训练组件;
9.所述安置筒内设有用于残端负重训练的负重训练组件。
10.优选的,所述转动组件包括转动连接在转动槽内的两个转动轴,所述转动轴的外壁固定套设有转动板和第一齿轮,所述安置筒靠近康复椅的一侧与转动板的一端转动连接,所述转动槽的底部内壁固定连接有电动推杆,所述电动推杆的输出轴固定连接有横板,且横板与转动槽的底部内壁滑动连接,所述横板靠近电动推杆的一侧固定连接有两个第一齿条,且第一齿条与第一齿轮相啮合,所述转动板的顶部设有用于对病人大腿底部肌肉按摩的按摩组件。
11.优选的,所述按摩组件包括固定连接在转动板顶部的按摩箱,所述转动板的顶部转动连接有转动杆,所述转动杆靠近转动轴的一端固定连接有第二伞齿轮,所述转动槽的顶部内壁固定连接有与第二伞齿轮相啮合的第一伞齿轮,且转动轴的顶端转动贯穿第一伞齿轮,所述按摩箱内转动连接有双向丝杆,且转动杆远离转动轴的一端延伸至按摩箱内并
与双向丝杆的一端固定连接,所述按摩箱的底部内壁滑动连接有与双向丝杆螺纹连接的两个梯形块,且两个梯形块分别位于双向丝杆的正反螺纹段上,所述按摩箱内滑动贯穿有多个按摩棒,且按摩棒的底端与梯形块滑动配合,所述按摩棒的外壁固定套设有位于按摩箱顶部的限位环,所述转动板的顶部固定连接有多个基座,且转动杆的一端转动贯穿基座。
12.优选的,所述膝关节训练组件包括设置在转动槽底部内壁的两个滑槽,两个转动板的底部均滑动连接有滑动板,所述滑动板的底部固定连接有与滑槽滑动配合的滑杆,所述滑动板远离滑杆的一端转动连接有转动块,所述转动块的另一侧与安置筒靠近康复椅的一侧滑动连接。
13.优选的,所述负重训练组件包括设置在安置筒内的通孔与传动孔,所述传动孔内转动连接有第二齿轮,转动块远离滑动板的一侧固定连接有与第二齿轮相啮合的第二齿条,且第二齿条滑动连接在传动孔内,所述通孔内滑动连接有升降板,所述升降板的一侧固定连接有与第二齿轮相啮合的第三齿条,且第三齿条滑动连接在传动孔内,所述通孔内固定连接有多个限位块,通过限位块能够对升降板进行限位,避免升降板从通孔中脱落。
14.优选的,所述转动板的顶部转动连接有两个弧形板,且两个所述弧形板位于按摩箱的两侧,所述弧形板的顶部固定连接有凸块,转动相对称的两个弧形板,使两个弧形板能够包裹病人的大腿,通过绷带缠绕在凸块上,进而能够使两个弧形板紧紧夹持大腿。
15.优选的,所述升降板的顶部固定连接有棉垫,所述棉垫的顶部固定连接有压力传感器,在进行负重训练时,通过棉垫能够避免残端与升降板出现硬性碰撞,对残端进行保护,且压力传感器能够实时监测棉垫对残端施加的压力,并将数据传输至控制面板处,当压力传感器监测到压力过大时,通过控制面板启动电动推杆,使电动推杆的输出轴带动横板反向滑动,避免棉垫施加的力过大对残端造成伤害。
16.优选的,所述安置筒的顶部设有盖板,所述盖板的底部转动连接有位于通孔内的转动盘,所述转动盘的顶端固定连接有转轴,且转轴的顶端转动贯穿盖板,所述转动盘的底部转动连接有多个圆杆,多个所述圆杆的底端转动连接有同一个底板,所述底板的底部固定连接有与棉垫顶部碰触的清洁层,所述圆杆的外壁固定套设有清洁棉筒,且清洁棉筒与通孔的内壁相碰触,所述盖板的底部固定连接有位于通孔内的内齿环,且内齿环与第四齿轮相啮合,当训练结束后,通孔内布满病人的汗渍,将圆杆、第四齿轮和底板放入通孔内,转动转轴,转轴带动转动盘、第四齿轮和圆杆转动,第四齿轮与内齿环相啮合,第四齿轮在内齿环的作用下带动圆杆和清洁棉筒进行自转,进而在转动盘带动圆杆和清洁棉筒转动时,圆杆与清洁棉筒进行自转,进而能够将通孔的内壁清洁干净,且圆杆带动底板转动,底板带动清洁层转动,清洁层能够将棉垫的顶部进行清洁。
17.优选的,所述安置筒的顶部设有多个卡槽,所述盖板的底部设有多个与卡槽相卡合的卡块,通过卡槽与卡块的配合能够将盖板卡接在安置筒的顶部,方便后期转动圆杆与清洁棉筒对通孔的内壁进行清洁。
18.所述一种假肢病人康复护理用智能化辅助系统的使用方法,包括以下步骤:
19.s1、病人坐在康复椅上,将病人的小腿残肢插入通孔中,接着转动相对称的两个弧形板,使两个弧形板能够包裹病人的大腿,通过绷带缠绕在凸块上,进而能够使两个弧形板紧紧夹持大腿;
20.s2、启动电动推杆驱动横板向外侧滑动,横板带动第一齿条向外侧滑动,第一齿条
与第一齿轮相啮合,第一齿条通过第一齿轮带动转动轴和转动板进行转动,进而转动板能够带动病人的大腿向外侧转动,从而能够完成病人的关节、肌力训练;
21.s3、在转动板转动过程中,滑杆在滑槽的作用下带动滑动板沿着转动板的轨迹向外侧滑动,滑动板通过转动块能够推动安置筒进行逆时针转动,进而随着滑动板的移动能够使安置筒进行转动,从而完成关节活动训练;
22.s4、另外滑动板通过转动块带动安置筒转动的过程中,转动块带动第二齿条向下移动,第二齿轮分别与第二齿条和第三齿条相啮合,第二齿条通过第二齿轮带动第三齿条和升降板向上移动,进而能够使棉垫与病人的残端碰触,随着安置筒逆时针转动的角度的增加,能够增加棉垫对病人残端的压力,使残端慢慢适应外界的压力,便于后期安装假肢,压力传感器能够实时监测棉垫对残端施加的压力,并将数据传输至控制面板处,当压力传感器监测到压力过大时,通过控制面板启动电动推杆,使电动推杆的输出轴带动横板反向滑动,避免棉垫施加的力过大,对残端造成伤害;
23.s5、在转动板转动时,转动板带动基座和转动杆以转动轴支点转动,第二伞齿轮与第一伞齿轮相啮合,进而在转动杆以转动轴为支点转动时,第二伞齿轮在第一伞齿轮的作用下带动转动杆和双向丝杆进行转动,两个梯形块与双向丝杆螺纹连接,且两个梯形块分别位于双向丝杆的正反螺纹段上,随着双向丝杆的转动,两个梯形块向两侧移动,梯形块能够推动按摩棒向上移动,进而能够使按摩棒对大腿底部的肌肉进行按摩,增加病人的训练时的舒适度,同样能够达到肌肉训练的目的;
24.s6、当训练结束后,通孔内布满病人的汗渍,将圆杆、第四齿轮和底板放入通孔内,卡块卡在卡槽内,转动转轴,转轴带动转动盘、第四齿轮和圆杆转动,第四齿轮与内齿环相啮合,第四齿轮在内齿环的作用下带动圆杆和清洁棉筒进行自转,进而在转动盘带动圆杆和清洁棉筒转动时,圆杆与清洁棉筒进行自转,进而能够将通孔的内壁清洁干净,且圆杆带动底板转动,底板带动清洁层转动,清洁层能够将棉垫的顶部进行清洁。
25.与现有技术相比,本发明提供了一种假肢病人康复护理用智能化辅助系统,具备以下有益效果:
26.1、该一种假肢病人康复护理用智能化辅助系统的转动槽的底部内壁固定连接有电动推杆,所述电动推杆的输出轴固定连接有横板,所述横板靠近电动推杆的一侧固定连接有两个第一齿条,且第一齿条与第一齿轮相啮合,在电动推杆带动横板和第一齿条向外侧移动时,第一齿条通过第一齿轮带动转动板进行相向转动,进而能够使病人的双腿向两侧转动,从而能够自动完成患者的关节训练。
27.2、该一种假肢病人康复护理用智能化辅助系统的转动板的底部滑动连接有滑动板,所述滑动板的底部固定连接有与滑槽滑动配合的滑杆,所述滑动板远离滑杆的一端转动连接有转动块,所述转动块的另一侧与安置筒靠近康复椅的一侧滑动连接,在转动板带动滑动板转动时,滑动板在滑杆和滑槽的配合下能够推动安置筒转动,进而在完成大腿关节、肌力训练的同时还能够带动膝关节训练。
28.3、该一种假肢病人康复护理用智能化辅助系统的转动块的一侧固定连接有与第二齿轮相啮合的第二齿条,所述升降板的一侧固定连接有与第二齿轮相啮合的第三齿条,在转动块带动第二齿条下移时,第二齿条通过第二齿轮带动第三齿条和升降板上移,进而在进行膝关节训练的同时还能够使升降板进行升降完成残端的负重训练。
29.4、该一种假肢病人康复护理用智能化辅助系统的转动板的顶部转动连接有转动杆,所述转动杆靠近转动轴的一端固定连接有第二伞齿轮,所述转动槽的顶部内壁固定连接有与第二伞齿轮相啮合的第一伞齿轮,且转动轴的顶端转动贯穿第一伞齿轮,在转动板带动转动杆以转动轴为支点转动时,转动杆在第一伞齿轮和第二伞齿轮的配合下能够带动双向丝杆进行转动,从而能够使梯形块一端,使按摩棒对病人的大腿肌肉进行按摩,增加病人的训练时的舒适度,同样能够达到肌肉训练的目的。
30.本发明结构简单,通过启动电动推杆推动横板和第一齿条往复滑动,能够时转动板往复转动,从而在转动板往复转动的过程中能够自动且同时的进行关节活动训练、肌力训练、负重训练以及肌肉按摩,不但解放医务人员的劳动力还能够提高康复训练的效率。
附图说明
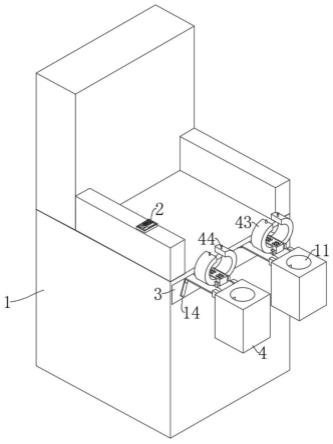
31.图1为本发明提出的一种假肢病人康复护理用智能化辅助系统的三维图;
32.图2为本发明提出的一种假肢病人康复护理用智能化辅助系统的第一视角三维剖视图;
33.图3为本发明提出的一种假肢病人康复护理用智能化辅助系统的第二视角三维剖视图;
34.图4为本发明提出的一种假肢病人康复护理用智能化辅助系统的转动板和安置筒的三维图;
35.图5为本发明提出的一种假肢病人康复护理用智能化辅助系统的安置筒的三维剖视图;
36.图6为本发明提出的一种假肢病人康复护理用智能化辅助系统的按摩组件的三维图;
37.图7为本发明提出的一种假肢病人康复护理用智能化辅助系统的按摩箱的三维剖视图;
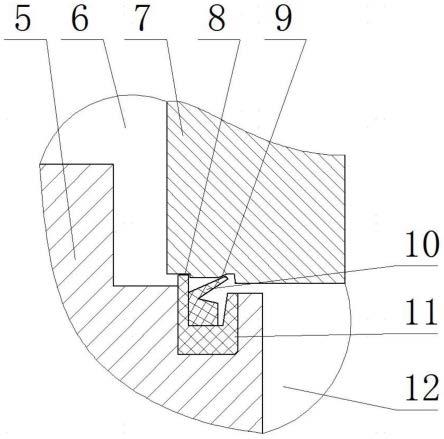
38.图8为实施例二中本发明提出的一种假肢病人康复护理用智能化辅助系统的夹块盖板的主视剖视图;
39.图9为图8中a处放大图。
40.图中:1、康复椅;2、控制面板;3、转动槽;4、安置筒;5、转动轴;6、转动板;7、第一齿轮;8、第一齿条;9、电动推杆;10、横板;11、通孔;12、滑动板;13、滑杆;14、滑槽;15、转动块;16、传动孔;17、第二齿轮;18、第二齿条;19、第三齿条;20、升降板;21、棉垫;22、压力传感器;23、限位块;24、第一伞齿轮;25、基座;26、转动杆;27、按摩箱;28、按摩棒;29、限位环;30、双向丝杆;31、梯形块;32、盖板;33、卡槽;34、卡块;35、转动盘;36、转轴;37、圆杆;38、第四齿轮;39、内齿环;40、清洁棉筒;41、清洁层;42、底板;43、弧形板;44、凸块;45、第二伞齿轮。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
42.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
43.实施例1:
44.参照图1-图7,一种假肢病人康复护理用智能化辅助系统,包括康复椅1,康复椅1的一侧设有两个安置筒4,康复椅1内设有转动槽3,康复椅1的顶部一侧通过螺栓固定连接有控制面板2,转动槽3内设有用于使病人大腿向两侧转动的转动组件,转动槽3内设有用于使安置筒4转动的膝关节训练组件,安置筒4内设有用于残端负重训练的负重训练组件。
45.本发明中,转动组件包括转动连接在转动槽3内的两个转动轴5,转动轴5的外壁固定套设有转动板6和第一齿轮7,安置筒4靠近康复椅1的一侧与转动板6的一端转动连接,转动槽3的底部内壁通过螺栓固定连接有电动推杆9,电动推杆9的输出轴通过螺栓固定连接有横板10,且横板10与转动槽3的底部内壁滑动连接,横板10靠近电动推杆9的一侧通过螺栓固定连接有两个第一齿条8,且第一齿条8与第一齿轮7相啮合,转动板6的顶部设有用于对病人大腿底部肌肉按摩的按摩组件,在电动推杆9带动横板10和第一齿条8向外侧移动时,第一齿条8通过第一齿轮7带动转动板6进行相向转动,进而能够使病人的双腿向两侧转动,从而能够自动完成患者的关节训练。
46.本发明中,按摩组件包括通过螺栓固定连接在转动板6顶部的按摩箱27,转动板6的顶部转动连接有转动杆26,转动杆26靠近转动轴5的一端通过螺栓固定连接有第二伞齿轮45,转动槽3的顶部内壁通过螺栓固定连接有与第二伞齿轮45相啮合的第一伞齿轮24,且转动轴5的顶端转动贯穿第一伞齿轮24,按摩箱27内转动连接有双向丝杆30,且转动杆26远离转动轴5的一端延伸至按摩箱27内并与双向丝杆30的一端固定连接,按摩箱27的底部内壁滑动连接有与双向丝杆30螺纹连接的两个梯形块31,且两个梯形块31分别位于双向丝杆30的正反螺纹段上,按摩箱27内滑动贯穿有多个按摩棒28,且按摩棒28的底端与梯形块31滑动配合,按摩棒28的外壁固定套设有位于按摩箱27顶部的限位环29,转动板6的顶部通过螺栓固定连接有多个基座25,且转动杆26的一端转动贯穿基座25,在转动板6带动转动杆26以转动轴5为支点转动时,转动杆26在第一伞齿轮24和第二伞齿轮45的配合下能够带动双向丝杆30进行转动,从而能够使梯形块31一端,使按摩棒28对病人的大腿肌肉进行按摩,增加病人的训练时的舒适度,同样能够达到肌肉训练的目的。
47.本发明中,膝关节训练组件包括设置在转动槽3底部内壁的两个滑槽14,两个转动板6的底部均滑动连接有滑动板12,滑动板12的底部通过螺栓固定连接有与滑槽14滑动配合的滑杆13,滑动板12远离滑杆13的一端转动连接有转动块15,转动块15的另一侧与安置筒4靠近康复椅1的一侧滑动连接,在转动板6带动滑动板12转动时,滑动板12在滑杆13和滑槽14的配合下能够推动安置筒4转动,进而在完成大腿关节、肌力训练的同时还能够带动膝关节训练。
48.本发明中,负重训练组件包括设置在安置筒4内的通孔11与传动孔16,传动孔16内转动连接有第二齿轮17,转动块15远离滑动板12的一侧通过螺栓固定连接有与第二齿轮17相啮合的第二齿条18,且第二齿条18滑动连接在传动孔16内,通孔11内滑动连接有升降板20,升降板20的一侧通过螺栓固定连接有与第二齿轮17相啮合的第三齿条19,且第三齿条19滑动连接在传动孔16内,通孔11内固定连接有多个限位块23,通过限位块23能够对升降
板20进行限位,避免升降板20从通孔11中脱落,在转动块15带动第二齿条18下移时,第二齿条18通过第二齿轮17带动第三齿条19和升降板20上移,进而在进行膝关节训练的同时还能够使升降板20进行升降完成残端的负重训练。
49.本发明中,转动板6的顶部转动连接有两个弧形板43,且两个弧形板43位于按摩箱27的两侧,弧形板43的顶部固定连接有凸块44,转动相对称的两个弧形板43,使两个弧形板43能够包裹病人的大腿,通过绷带缠绕在凸块44上,进而能够使两个弧形板43紧紧夹持大腿。
50.本发明中,升降板20的顶部固定连接有棉垫21,棉垫21的顶部固定连接有压力传感器22,在进行负重训练时,通过棉垫21能够避免残端与升降板20出现硬性碰撞,对残端进行保护,且压力传感器22能够实时监测棉垫21对残端施加的压力,并将数据传输至控制面板2处,当压力传感器22监测到压力过大时,通过控制面板2启动电动推杆9,使电动推杆9的输出轴带动横板10反向滑动,避免棉垫21施加的力过大对残端造成伤害。
51.实施例2:
52.参照图1-图9,一种假肢病人康复护理用智能化辅助系统,包括康复椅1,康复椅1的一侧设有两个安置筒4,康复椅1内设有转动槽3,康复椅1的顶部一侧通过螺栓固定连接有控制面板2,转动槽3内设有用于使病人大腿向两侧转动的转动组件,转动槽3内设有用于使安置筒4转动的膝关节训练组件,安置筒4内设有用于残端负重训练的负重训练组件。
53.本发明中,转动组件包括转动连接在转动槽3内的两个转动轴5,转动轴5的外壁固定套设有转动板6和第一齿轮7,安置筒4靠近康复椅1的一侧与转动板6的一端转动连接,转动槽3的底部内壁通过螺栓固定连接有电动推杆9,电动推杆9的输出轴通过螺栓固定连接有横板10,且横板10与转动槽3的底部内壁滑动连接,横板10靠近电动推杆9的一侧通过螺栓固定连接有两个第一齿条8,且第一齿条8与第一齿轮7相啮合,转动板6的顶部设有用于对病人大腿底部肌肉按摩的按摩组件,在电动推杆9带动横板10和第一齿条8向外侧移动时,第一齿条8通过第一齿轮7带动转动板6进行相向转动,进而能够使病人的双腿向两侧转动,从而能够自动完成患者的关节训练。
54.本发明中,按摩组件包括通过螺栓固定连接在转动板6顶部的按摩箱27,转动板6的顶部转动连接有转动杆26,转动杆26靠近转动轴5的一端通过螺栓固定连接有第二伞齿轮45,转动槽3的顶部内壁通过螺栓固定连接有与第二伞齿轮45相啮合的第一伞齿轮24,且转动轴5的顶端转动贯穿第一伞齿轮24,按摩箱27内转动连接有双向丝杆30,且转动杆26远离转动轴5的一端延伸至按摩箱27内并与双向丝杆30的一端固定连接,按摩箱27的底部内壁滑动连接有与双向丝杆30螺纹连接的两个梯形块31,且两个梯形块31分别位于双向丝杆30的正反螺纹段上,按摩箱27内滑动贯穿有多个按摩棒28,且按摩棒28的底端与梯形块31滑动配合,按摩棒28的外壁固定套设有位于按摩箱27顶部的限位环29,转动板6的顶部通过螺栓固定连接有多个基座25,且转动杆26的一端转动贯穿基座25,在转动板6带动转动杆26以转动轴5为支点转动时,转动杆26在第一伞齿轮24和第二伞齿轮45的配合下能够带动双向丝杆30进行转动,从而能够使梯形块31一端,使按摩棒28对病人的大腿肌肉进行按摩,增加病人的训练时的舒适度,同样能够达到肌肉训练的目的。
55.本发明中,膝关节训练组件包括设置在转动槽3底部内壁的两个滑槽14,两个转动板6的底部均滑动连接有滑动板12,滑动板12的底部通过螺栓固定连接有与滑槽14滑动配
合的滑杆13,滑动板12远离滑杆13的一端转动连接有转动块15,转动块15的另一侧与安置筒4靠近康复椅1的一侧滑动连接,在转动板6带动滑动板12转动时,滑动板12在滑杆13和滑槽14的配合下能够推动安置筒4转动,进而在完成大腿关节、肌力训练的同时还能够带动膝关节训练。
56.本发明中,负重训练组件包括设置在安置筒4内的通孔11与传动孔16,传动孔16内转动连接有第二齿轮17,转动块15远离滑动板12的一侧通过螺栓固定连接有与第二齿轮17相啮合的第二齿条18,且第二齿条18滑动连接在传动孔16内,通孔11内滑动连接有升降板20,升降板20的一侧通过螺栓固定连接有与第二齿轮17相啮合的第三齿条19,且第三齿条19滑动连接在传动孔16内,通孔11内固定连接有多个限位块23,通过限位块23能够对升降板20进行限位,避免升降板20从通孔11中脱落,在转动块15带动第二齿条18下移时,第二齿条18通过第二齿轮17带动第三齿条19和升降板20上移,进而在进行膝关节训练的同时还能够使升降板20进行升降完成残端的负重训练。
57.本发明中,转动板6的顶部转动连接有两个弧形板43,且两个弧形板43位于按摩箱27的两侧,弧形板43的顶部固定连接有凸块44,转动相对称的两个弧形板43,使两个弧形板43能够包裹病人的大腿,通过绷带缠绕在凸块44上,进而能够使两个弧形板43紧紧夹持大腿。
58.本发明中,升降板20的顶部固定连接有棉垫21,棉垫21的顶部固定连接有压力传感器22,在进行负重训练时,通过棉垫21能够避免残端与升降板20出现硬性碰撞,对残端进行保护,且压力传感器22能够实时监测棉垫21对残端施加的压力,并将数据传输至控制面板2处,当压力传感器22监测到压力过大时,通过控制面板2启动电动推杆9,使电动推杆9的输出轴带动横板10反向滑动,避免棉垫21施加的力过大对残端造成伤害。
59.本发明中,安置筒4的顶部设有盖板32,盖板32的底部转动连接有位于通孔11内的转动盘35,转动盘35的顶端通过螺栓固定连接有转轴36,且转轴36的顶端转动贯穿盖板32,转动盘35的底部转动连接有多个圆杆37,多个圆杆37的底端转动连接有同一个底板42,底板42的底部通过螺栓固定连接有与棉垫21顶部碰触的清洁层41,圆杆37的外壁固定套设有清洁棉筒40,且清洁棉筒40与通孔11的内壁相碰触,盖板32的底部通过螺栓固定连接有位于通孔11内的内齿环39,且内齿环39与第四齿轮38相啮合,当训练结束后,通孔11内布满病人的汗渍,将圆杆37、第四齿轮38和底板42放入通孔11内,转动转轴36,转轴36带动转动盘35、第四齿轮38和圆杆37转动,第四齿轮38与内齿环39相啮合,第四齿轮38在内齿环39的作用下带动圆杆37和清洁棉筒40进行自转,进而在转动盘35带动圆杆37和清洁棉筒40转动时,圆杆37与清洁棉筒40进行自转,进而能够将通孔11的内壁清洁干净,且圆杆37带动底板42转动,底板42带动清洁层41转动,清洁层41能够将棉垫21的顶部进行清洁。
60.本发明中,安置筒4的顶部设有多个卡槽33,盖板32的底部设有多个与卡槽33相卡合的卡块34,通过卡槽33与卡块34的配合能够将盖板32卡接在安置筒4的顶部,方便后期转动圆杆37与清洁棉筒40对通孔11的内壁进行清洁。
61.一种假肢病人康复护理用智能化辅助系统的使用方法,它包括以下步骤:
62.s1、病人坐在康复椅1上,将病人的小腿残肢插入通孔11中,接着转动相对称的两个弧形板43,使两个弧形板43能够包裹病人的大腿,通过绷带缠绕在凸块44上,进而能够使两个弧形板43紧紧夹持大腿;
63.s2、启动电动推杆9驱动横板10向外侧滑动,横板10带动第一齿条8向外侧滑动,第一齿条8与第一齿轮7相啮合,第一齿条8通过第一齿轮7带动转动轴5和转动板6进行转动,进而转动板6能够带动病人的大腿向外侧转动,从而能够完成病人的关节、肌力训练;
64.s3、在转动板6转动过程中,滑杆13在滑槽14的作用下带动滑动板12沿着转动板6的轨迹向外侧滑动,滑动板12通过转动块15能够推动安置筒4进行逆时针转动,进而随着滑动板12的移动能够使安置筒4进行转动,从而完成关节活动训练;
65.s4、另外滑动板12通过转动块15带动安置筒4转动的过程中,转动块15带动第二齿条18向下移动,第二齿轮17分别与第二齿条18和第三齿条19相啮合,第二齿条18通过第二齿轮17带动第三齿条19和升降板20向上移动,进而能够使棉垫21与病人的残端碰触,随着安置筒4逆时针转动的角度的增加,能够增加棉垫21对病人残端的压力,使残端慢慢适应外界的压力,便于后期安装假肢,压力传感器22能够实时监测棉垫21对残端施加的压力,并将数据传输至控制面板2处,当压力传感器22监测到压力过大时,通过控制面板2启动电动推杆9,使电动推杆9的输出轴带动横板10反向滑动,避免棉垫21施加的力过大,对残端造成伤害;
66.s5、在转动板6转动时,转动板6带动基座25和转动杆26以转动轴5支点转动,第二伞齿轮45与第一伞齿轮24相啮合,进而在转动杆26以转动轴5为支点转动时,第二伞齿轮45在第一伞齿轮24的作用下带动转动杆26和双向丝杆30进行转动,两个梯形块31与双向丝杆30螺纹连接,且两个梯形块31分别位于双向丝杆30的正反螺纹段上,随着双向丝杆30的转动,两个梯形块31向两侧移动,梯形块31能够推动按摩棒28向上移动,进而能够使按摩棒28对大腿底部的肌肉进行按摩,增加病人的训练时的舒适度,同样能够达到肌肉训练的目的;
67.s6、当训练结束后,通孔11内布满病人的汗渍,将圆杆37、第四齿轮38和底板42放入通孔11内,卡块34卡在卡槽33内,转动转轴36,转轴36带动转动盘35、第四齿轮38和圆杆37转动,第四齿轮38与内齿环39相啮合,第四齿轮38在内齿环39的作用下带动圆杆37和清洁棉筒40进行自转,进而在转动盘35带动圆杆37和清洁棉筒40转动时,圆杆37与清洁棉筒40进行自转,进而能够将通孔11的内壁清洁干净,且圆杆37带动底板42转动,底板42带动清洁层41转动,清洁层41能够将棉垫21的顶部进行清洁。
68.然而,如本领域技术人员所熟知的控制面板2、压力传感器22和电动推杆9的工作原理和接线方法属于本技术领域常规手段或者公知常识,在此就不再赘述,本领域技术人员可以根据其需要或者便利进行任意的选配。
69.以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。