1.本发明涉及一种双模式肢体运动训练器,属于康复医疗器械技术领域。
背景技术:
2.进行康复训练是提高肢体运动功能受限患者的非常重要且有效的康复手段,目前的四肢康复训练器运动形式单一,通常采用步态运动模式,即上肢与下肢相反,两侧上肢运动方向相反的运动模式,而上肢于与下肢相互靠近或者相互远离也是康复训练的一种训练方式,例如双手同时拍腿或者上肢和下肢同时后仰的运动模式,所以患者康复训练采用步态运动模式和双侧上肢方向相同,双侧下肢方向也相同,且上肢与下肢运动方向相反的运动是患者康复训练效果的有效运动模式,另外,现在的康复训练器下肢前后移动过程中不能左右移动,运动轨迹单一,不利于患者的康复。
技术实现要素:
3.本发明目的在于:提供一种一侧上肢带动下肢反向运动、下肢前后移动过程中左右移动、两侧肢体进行步态运动模式和上侧肢体同向与下侧肢体靠近和远离的两种可切换的训练模式的运动训练器。
4.本发明的技术方案是这样实现的:一种双模式肢体运动训练器,包括支撑座2、右运动机构3、传动机构4、左运动机构5,所述的支撑座2呈左右对称的结构,所述的右运动机构3与左运动机构5关于支撑座2的左右对称平面对称设置,所述的右运动机构3包括右脚掌托302、右滑块303、右手摇杆305,所述的右手摇杆305固定右摆动杆307右端,右手摇杆305一端向后侧、上侧伸出,右手摇杆305另一端向下侧、前侧伸出,支撑座2上设置有右滑块303的滑动支撑结构,右滑块303沿着前后方向滑动,右滑块303滑动安装右移动块310,右移动块310沿着左右方向滑动,右移动块310固定右脚掌托302,右手摇杆305另一端通过连杆机构连接右脚掌托302,右脚掌托302上转动安装右齿轮309,右齿轮309与支撑座2上固定的右齿条313啮合,右齿轮309固定的右驱动杆312端部在右脚掌托302上设置的右滑槽3021内滑动;所述的传动机构4包括中间固定轴408,中间固定轴408固定在支撑座2上,右摆动杆307内孔转动安装中间固定轴408,右摆动杆307固定的右锥齿轮407与中间锥齿轮404啮合,左运动机构5的左摆动杆固定的左锥齿轮405与中间锥齿轮404啮合,中间固定轴408上设置有将中间锥齿轮404的转动支撑部件固定或者将左摆动杆与右摆动杆307固定连接的机构。
5.优选地,所述的中间固定轴408上设置有将中间锥齿轮404的转动支撑部件固定或者将左摆动杆与右摆动杆307固定连接的机构的结构为:所述的中间固定轴408中间转动安装转动轴套406,转动轴套406中部设置有向前伸出的圆柱凸台4061,圆柱凸台4061的中心轴线与转动轴套406的中心轴线正交设置,圆柱凸台4061的螺纹孔旋合丝杠402的后部,圆柱凸台4061转动安装中间锥齿轮404,丝杠402中部转动安装u形架401的u形水平边,u形架
401的两条平行边位于u形架401水平边的后侧,u形架401的两条平行边关于支撑座2的左右对称平面对称设置,u形架401的两条平行边后端部均设置有环形长槽4011,环形长槽4011为前后侧均为半圆形的长槽,所述的环形长槽4011沿着上下方向的宽度大于右摆动杆307外径0.5-1mm,右摆动杆307位于环形长槽4011内,所述的丝杠402的前端固定手轮403。
6.优选地,所述的环形长槽4011长度满足:当丝杠402后端顶紧中间固定轴408后,环形长槽4011前端半圆形与右摆动杆307脱离,且环形长槽4011后端与右摆动杆307未接触,而当丝杠402向后旋出至环形长槽4011前端半圆形与右摆动杆307压紧时,丝杠402后端与中间固定轴408不接触,所述的环形长槽4011的后侧半圆形内孔设置有摩擦垫4012。
7.优选地,所述的支撑座2上设置有右滑块303的滑动支撑结构为:右导杆一301、右导杆二314沿着前后方向并排平行设置,右导杆一301和右导杆二314的前后端均固定在支撑座1上,右滑块303下侧左、右部分别滑动安装在右导杆二314和右导杆一301上,右滑块303沿着左右方向水平设置。
8.优选地,所述的右滑块303中部后侧固定右支撑杆311的前端,右支撑杆311后端向上伸出,右支撑杆311后端向上伸出部转动安装右齿轮309,右齿轮309与右齿条313啮合,右齿条313固定在右导杆一301的左侧,右导杆一301位于右导杆二314的右侧,且右导杆一301高于右导杆二314,用于避让右齿轮309。
9.优选地,所述的右齿轮309上端边缘固定右驱动杆312一端,右驱动杆312另一端朝向右齿轮309外侧伸出,右驱动杆312另一端固定右柱销308的下端,右柱销308上端在右滑槽3021内滑动。
10.优选地,所述的中间固定轴408固定在支撑座2上的结构为:所述的中间固定轴关于支撑座2的左右对称平面对称设置,所述的右摆动杆307中部设置有半环形槽3071,位于右前支撑梁201上与半环形槽3071相适应的位置设置有右固定手柄315,右固定手柄315前部的螺杆与右前支撑梁201上的螺纹孔旋合,后部穿过半环形槽3071后插入到中间固定轴408右端的固定孔4081内,右固定手柄315的后部不与半环形槽3071接触。
11.优选地,所述的右手摇杆305另一端通过连杆机构连接右脚掌托302的结构为:所述的右手摇杆305另一端的端部铰接右连接杆306的前端,右连接杆306后端铰接右牵引杆304前端,右牵引杆304后端固定右滑块303下侧中部。
12.与现有技术相比,本发明具有如下优点:采用右手摇杆下侧前伸、上侧后伸的结构,实现上下肢步态反向运动;采用下肢运动过程中通过右脚掌托上转动安装的右齿轮与支撑座上的右齿条啮合,并通过右齿轮上固定的右驱动杆在右脚掌托上的右滑槽内滑动,驱动右脚掌托左右移动,实现患者运动轨迹沿着左右方向变化,提高康复效果;右手摇杆带动右摆动杆转动,右摆动杆转动安装在支撑座上,右摆动杆内孔转动安装中间固定轴,右固定手柄右摆动杆与支撑座转动连接位置设置从外侧向内侧贯穿的半环形槽,右固定手柄后部穿过半环形槽后插入到中间固定轴的固定孔中,实现中间固定轴的固定,患者上肢前后运动极限位置时,右摆动杆转动范围不会超过半圈,右固定手柄固定了中间固定轴,且不影响右手摇杆的摆动;右摆动杆固定右锥齿轮,左摆动杆固定左锥齿轮,右锥齿轮与左锥齿轮同时与中间锥齿轮啮合,且中间锥齿轮转动安装在转动轴套向前伸出的圆柱凸台上,u形架水平边转动连接丝杠,圆柱凸台内孔旋合丝杠后部,u形架两侧平行边设置有环形长槽,用于容纳左摆动杆、右摆动杆,实现通过旋转
丝杠前后移动,切换两种运动模式。
附图说明
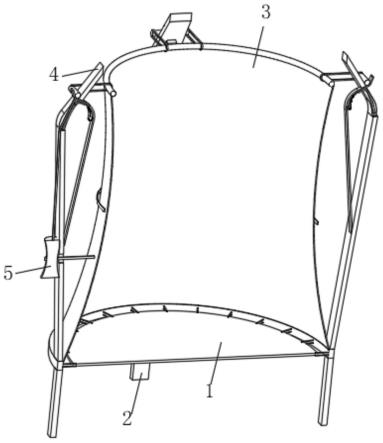
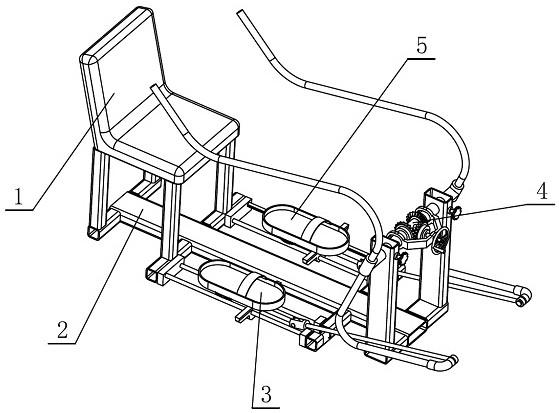
13.图1是双模式肢体运动训练器的总体结构示意图。
14.图2是右运动机构的总体结构示意图。
15.图3是去掉右脚掌托后的右运动机构下部结构示意图一。
16.图4是去掉右脚掌托后的右运动机构下部结构示意图二。
17.图5是右齿轮与右侧齿条啮合的结构示意图。
18.图6是传动机构的总体结构示意图。
19.图7是右摆动杆的半环形槽内设置有右固定手柄的结构示意图。
20.图8是右固定手柄插入到中间固定轴的固定孔内以及丝杠顶紧中间固定轴的结构示意图。
21.图9是传动机构的全剖视图。
22.图10是u形架两侧的环形长槽与右摆动杆位置关系的结构示意图。
23.图11是位移传感器安装结构示意图。
24.图12是右滑块上与右导杆滑动连接位置设置有用于避让右齿条的贯穿槽的结构示意图。
25.附图标记说明:1-座椅、2-支撑座、3-右运动机构、4-传动机构、5-左运动机构、6-位移传感器、201-右前支撑梁、301-右导杆一、302-右脚掌托、303-右滑块、304-右牵引杆、305-右手摇杆、306-右连接杆、307-右摆动杆、308-右柱销、309-右齿轮、310-右移动块、311-右支撑杆、312-右驱动杆、313-右齿条、314-右导杆二、315-右固定手柄、401-u形架、402-丝杠、403-手轮、404-中间锥齿轮、405-左锥齿轮、406-转动轴套、407-右锥齿轮、408-中间固定轴、3021-右滑槽、3031-贯穿槽、3071-半环形槽、4011-环形长槽、4012-摩擦垫、4061-圆柱凸台、4081-固定孔。
具体实施方式
26.结合图1-12,本发明的双模式肢体运动训练器,包括座椅1、支撑座2、右运动机构3、传动机构4、左运动机构5,所述的支撑座2呈左右对称的结构,以患者的上下、左右、前后方向分别定义本技术的上下、左右、前后方向,以便描述本技术,所述的右运动机构3与左运动机构5关于支撑座2的左右对称平面对称设置,所述的右运动机构3包括右导杆一301、右脚掌托302、右滑块303、右牵引杆304、右手摇杆305、右连接杆306、右摆动杆307、右柱销308、右齿轮309、右移动块310、右支撑杆311、右驱动杆312、右齿条313、右导杆二314、右固定手柄315,所述的右手摇杆305中部固定右摆动杆307的右端,右手摇杆305一端向后侧、上侧伸出,所述的右手摇杆305另一端向下侧、前侧伸出,右手摇杆305另一端的端部铰接右连接杆306的前端,右连接杆306后端铰接右牵引杆304前端,右牵引杆304后端固定右滑块303下侧中部,右导杆一301、右导杆二314沿着前后方向并排平行设置,且右导杆一301、右导杆二314悬空设置,右导杆一301和右导杆二314的前后端均固定在支撑座1上,右滑块303下侧左、右部分别滑动安装在右导杆二314和右导杆一301上,右滑块303沿着左右方向水平设置,右滑块303上部滑动安装右移动块310,右移动块310固定右脚掌托302的前部下侧,所述
的右滑块303中部后侧固定右支撑杆311的前端,右支撑杆311后端向上伸出,右支撑杆311后端向上伸出部转动安装右齿轮309,右齿轮309与右齿条313啮合,右齿条313固定在右导杆一301的左侧,右导杆一301位于右导杆二314的右侧,且右导杆一301高于右导杆二314,用于避让右齿轮309,所述的右齿轮309上端边缘固定右驱动杆312一端,右驱动杆312另一端朝向右齿轮309外侧伸出,右驱动杆312另一端固定右柱销308的下端,右柱销308上端在右滑槽3021内滑动,所述的右脚掌托302下侧的后端至中部设置有右滑槽3021,右滑槽3021沿着前后方向设置。
27.所述的支撑座2前端左侧设置有右前支撑梁201,右前支撑梁201下端固定在支撑座2上,右前支撑梁201上端转动安装右摆动杆307的中部,呈中空的结构,右摆动杆307中部设置有半环形槽3071,位于右前支撑梁201上与半环形槽3071相适应的位置设置有右固定手柄315,右固定手柄315前部的螺杆与右前支撑梁201上的螺纹孔旋合,后部穿过半环形槽3071后插入到中间固定轴408右端的固定孔4081内,右固定手柄315的后部直径小于半环形槽3071的宽度,即右固定手柄315的后部不与半环形槽3071接触。
28.所述的传动机构4包括u形架401、丝杠402、手轮403、中间锥齿轮404、左锥齿轮405、转动轴套406、右锥齿轮407、中间固定轴408,所述的中间固定轴关于支撑座2的左右对称平面对称设置,所述的中间固定轴408位于右摆动杆307内侧,右摆动杆307与中间固定轴408同轴且转动连接,所述的右摆动杆307向左穿过环形长槽4011后,左端固定右锥齿轮407,右锥齿轮407与中间锥齿轮404啮合,中间锥齿轮404与左锥齿轮405啮合,左锥齿轮405固定在左运动机构5的左摆动杆的右端,所述的中间固定轴408中间转动安装转动轴套406,转动轴套406中部设置有向前伸出的圆柱凸台4061,圆柱凸台4061的中心轴线与转动轴套406的中心轴线正交设置,圆柱凸台4061的螺纹孔旋合丝杠402的后部,圆柱凸台4061转动安装中间锥齿轮404,丝杠402中部转动安装u形架401的u形水平边,u形架401的两条平行边位于u形架401水平边的后侧,u形架401的两条平行边关于支撑座2的左右对称平面对称设置,u形架401的两条平行边后端部均设置有环形长槽4011,环形长槽4011为前后侧均为半圆形的长槽,且环形长槽4011的后侧半圆形内孔设置有摩擦垫4012。所述的环形长槽4011沿着上下方向的宽度大于右摆动杆307外径0.5-1mm,所述的丝杠402的前端固定手轮403。所述的环形长槽4011长度满足:当丝杠402后端顶紧中间固定轴408后,环形长槽4011前端半圆形与右摆动杆307脱离,且环形长槽4011后端与右摆动杆307未接触,而当丝杠402向后旋出至环形长槽4011前端半圆形与右摆动杆307压紧时,丝杠402后端与中间固定轴408不接触。
29.所述的双模式肢体运动训练器还包括位移传感器6,位移传感器6为拉线式传感器,拉线式传感器的拉线端固定在右滑块303上,拉线式传感器的固定端固定在支撑座2上,拉线式传感器与控制系统连接,右滑块303每次向前、向后的位移取绝对值后相累加,计算出右滑块303向前移动和向后移动的距离之和,相当于患者下肢步态移动了多远的路程,计算出患者的运动量。
30.所述的支撑座2后端固定座椅1。
31.患者需要双侧肢体进行步态康复训练时,即双侧上肢前后反向运动,患者一侧肢体运动功能障碍,需要另一侧肢体进行牵引运动时,例如右侧肢体主动运动带动左侧肢体被动运动,旋转手轮403,丝杠402向后侧旋入顶紧中间固定轴408,圆柱凸台4061固定在中
间固定轴408上,环形长槽4011前端半圆形与右摆动杆307脱离,且环形长槽4011后端与右摆动杆307未接触,患者右手抓握右手摇杆305后侧上端部,患者右脚踏在右脚掌托302上,患者左手抓握或者采用绑带固定在左运动机构5的左手摇杆后侧上端部,左脚固定在左运动机构的左脚掌托上,控制系统将拉线式传感器的数值复位置零,患者右手前后推拉右手摇杆305的后侧上端,右手摇杆305另一端驱动右连接杆306前后移动,右牵引杆304前后移动,右滑块303前后移动,右齿条313驱动右齿轮309转动,右驱动杆312转动,右柱销308上端在右滑槽3021内滑动,右脚掌托302沿着右移动块310左右移动,所以右脚掌托302即前后移动又实现左右移动,且右齿轮309直径不大,右脚掌托302前后移动时,右齿轮309转动不少于一圈,增加患者脚部运动范围,提高康复效果,右手摇杆305摆动时,右摆动杆307转动,右锥齿轮407通过中间锥齿轮404带动左锥齿轮405转动,实现双侧上肢反方向运动,以及下肢反向运动,如果患者想双侧上肢同向运动,双侧下肢均与上肢反向运动时,将右手摇杆305与左运动机构5的左手摇杆距离座椅1距离相等时,即从右向左看右手摇杆305与左手摇杆重叠时,用以防止右脚掌托302与左运动机构5的左脚掌托向左右侧摆动不同步而降低舒适性,将丝杠402向后旋出至环形长槽4011前端半圆形与右摆动杆307压紧,由于右摆动杆307对环形长槽4011的转动限制,u形架不会转动,且丝杠402后端与中间固定轴408不接触,u形架401将右摆动杆307与左运动机构5的左摆动杆固定连接,患者右手前后推拉右手摇杆305时,右摆动杆307通过u形架401带动左运动机构5的左摆动杆307同步同向摆动,而双侧下肢与上肢运动方向相反,当患者想切换回四肢步态运动时,将右手摇杆305与左运动机构5的左手摇杆距离座椅1距离相等时,旋转手轮403,丝杠402向后侧旋入顶紧中间固定轴408,圆柱凸台4061固定在中间固定轴408上,环形长槽4011前端半圆形与右摆动杆307脱离,且环形长槽4011后端与右摆动杆307未接触,患者在运动过程中,控制系统通过拉线式传感器检测的右滑块303位移,绝对值后相累加的竖直,得出患者的运动量,对患者每次运动进行量化和督促。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。