1.本发明涉及医疗器械技术领域,特别是涉及一种帕金森病术后程控系统。
背景技术:
2.帕金森病是中老年人常见的一种神经退行性疾病。主要表现为震颤、肌僵直、运动迟缓及姿势异常等。早期帕金森病患者服用左旋多巴胺类药物后症状控制比较理想,随着病情进展,多数患者在中晚期(5年蜜月期过后)会出现药物疗效减退及严重的运动并发症,单纯依靠药物难以达到较好治疗效果。脑深部电刺激术(deep brain stimulation,dbs)是治疗中晚期帕金森病的有效方法,可以改善这些患者的运动症状,提高他们的生活质量。帕金森病患者进行dbs术后经常出现由肌无力、肌僵直、主观能动性差等因素引起的行走困难问题,在对行走困难的原因进行判断时,目前临床上基本都是医生通过临床经验进行判断分析,使得判断结果往往存在较大偏差。
技术实现要素:
3.为解决现有技术存在的上述问题,本发明提供了一种帕金森病术后程控系统。
4.为实现上述目的,本发明提供了如下方案:
5.一种帕金森病术后程控系统,包括:
6.表面肌电信号采集器,用于采集帕金森病术后病人的表面肌电信号,并用于根据所述表面肌电信号生成肌电图;
7.处理器,与所述表面肌电信号采集器连接,用于根据所述肌电图确定引起帕金森病术后病人行走困难的原因;
8.反馈调节器,与所述处理器连接,用于根据所确定的原因生成调节信号,并用于根据所述调节信号调节所述肌电图;
9.所述处理器还用于根据调节后的肌电图校正引起帕金森病术后病人行走困难的原因,并生成报告。
10.优选地,所述处理器包括:
11.第一处理单元,与所述表面肌电信号采集器连接,用于提取所述肌电图中表面肌电信号的幅度,并判断所述幅度是否存在异常;
12.第一原因确定单元,与所述第一处理单元连接,用于当所述幅度存在异常时,根据所述幅度确定引起帕金森病术后病人行走困难的原因为肌无力或肌僵直;
13.第二处理单元,与所述表面肌电信号采集器连接,用于当所述幅度无异常时,提取所述肌电图中屈肌和伸肌表面肌电信号的放电时程及放电时程的交替性;
14.第二原因确定单元,与所述第二处理单元连接,用于根据所述屈肌和伸肌表面肌电信号的放电时程及放电时程的交替性确定引起帕金森病术后病人行走困难的原因是否为运动协调性差。
15.优选地,还包括:
16.显示器,分别与所述处理器和所述反馈调节器连接,用于显示根据所述调节信号调节所述肌电图的动态过程和所述报告。
17.优选地,所述反馈调节器包括:
18.输入单元,与所述处理器连接,用于输入预设调节信号。
19.优选地,还包括:
20.语音播放器,分别与所述处理器和所述反馈调节器连接,用于基于语音播报根据所述调节信号调节所述肌电图的动态过程和所述报告。
21.优选地,所述处理器为植入在计算机中的处理芯片。
22.根据本发明提供的具体实施例,本发明公开了以下技术效果:
23.本发明提供的帕金森病术后程控系统,通过采用表面肌电信号采集器采集帕金森病术后病人的表面肌电信号,为处理器确定引起帕金森病术后病人行走困难的原因提供数据基础,并且采用反馈调节器对处理器确定的原因进行调节,进一步提高所确定引起帕金森病术后病人行走困难的原因的准确性,为临床医生提供精确的理论指导。并且,本发明基于机器处理的角度进行引起帕金森病术后病人行走困难原因的确定,能够提高确定效率。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
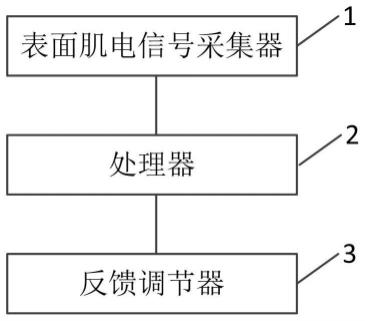
25.图1为本发明提供的帕金森病术后程控系统的结构示意图;
26.图2为本发明实施例提供的帕金森病术后程控系统实施流程图。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.本发明的目的是提供一种帕金森病术后程控系统,能够准确确定帕金森病术后引起行走困难的原因。
29.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
30.如图1所示,本发明提供的帕金森病术后程控系统,包括:表面肌电信号采集器1、处理器2和反馈调节器3。
31.其中,表面肌电信号采集器1用于采集帕金森病术后病人的表面肌电信号,并用于根据表面肌电信号生成肌电图。
32.处理器2与表面肌电信号采集器1连接,处理器2用于根据肌电图确定引起帕金森病术后病人行走困难的原因。
33.反馈调节器3与处理器2连接,反馈调节器3用于根据所确定的原因生成调节信号,
并用于根据调节信号调节肌电图。
34.基于反馈调节器3的功能,处理器2还用于根据调节后的肌电图校正引起帕金森病术后病人行走困难的原因,并生成报告。其中,采用的处理器2可以是植入在计算机中的处理芯片,以系统的适用性。
35.为了进一步提高确定引起帕金森病术后病人行走困难的原因的精确性,本发明采用的处理器2包括:第一处理单元、第一原因确定单元、第二处理单元和第二原因确定单元。
36.其中,第一处理单元,与表面肌电信号采集器1连接,用于提取肌电图中表面肌电信号的幅度,并判断幅度是否存在异常。
37.第一原因确定单元,与第一处理单元连接,用于当幅度存在异常时,根据幅度确定引起帕金森病术后病人行走困难的原因为肌无力或肌僵直。例如,当幅度连续降低时,判定为引起帕金森病术后病人行走困难的原因为肌无力。
38.第二处理单元,与表面肌电信号采集器1连接,用于当幅度无异常时,提取肌电图中屈肌和伸肌表面肌电信号的放电时程及放电时程的交替性。
39.第二原因确定单元,与第二处理单元连接,用于根据屈肌和伸肌表面肌电信号的放电时程及放电时程的交替性确定引起帕金森病术后病人行走困难的原因是否为运动协调性差。例如,屈肌表面肌电信号的放电时间和伸肌表面肌电信号的放电时间重叠时,表明病人肌肉在伸肌收缩的时候,屈肌同时进行缩,二者不协调,进而确定引起帕金森病术后病人行走困难的原因是否为运动协调性差。
40.进一步,为了便于用户进行观察和调整,本发明提供的帕金森病术后程控系统中还设置有显示器。该显示器分别与处理器2和反馈调节器3连接,主要作用是显示根据调节信号调节肌电图的动态过程和报告。
41.进一步,为了提高用户使用的便捷性,还可以在提供的帕金森病术后程控系统中设置语音播放器,以用于基于语音播报根据调节信号调节肌电图的动态过程和报告。
42.进一步,为了提高原因确定的准确性,以及用户调节校正的实时性,在上述采用的反馈调节器3中还设置有输入单元,以便于用户按照临床经验进行调节信号的输入,以验证报告的精确性。
43.下面提供一个实施例对上述提供的帕金森病术后程控系统的具体工作流程进行说明。
44.表面肌电信号采集器1采集的帕金森病术后病人的表面肌电信号时,分为主动表面肌电信号和被动表面肌电信号。其中,主动表面肌电信号是让病人自己用力按照预设动作进行操作一定时间后得到的信号。被动表面肌电信号是人为活动病人肢体进行相应动作得到的信号。然后基于采集得到的表面肌电信号生成肌电图。
45.处理器2提取肌电图中表面肌电信号的幅度,并判断幅度是否存在异常,当幅度存在异常时,根据幅度确定引起帕金森病术后病人行走困难的原因为肌无力或肌僵直,当幅度无异常时,提取肌电图中屈肌和伸肌表面肌电信号的放电时程及放电时程的交替性,根据屈肌和伸肌表面肌电信号的放电时程及放电时程的交替性确定引起帕金森病术后病人行走困难的原因是否为运动协调性差。然后根据确定结果生成辅助报告。
46.为了进一步验证报告的准确性,用户可以通过反馈调节器3输入调节信号,对采集得到的表面肌电信号进行干预,当输入的调节信号使得确定的引起帕金森病术后病人行走
困难的原因消除时,说明之前确定的原因准确,当确定的引起帕金森病术后病人行走困难的原因并未消除,并且情况更加严重时,说明生成的报告存在偏差,此时重新进行表面肌电信号的采集,校正报告。
47.以上具体数据处理过程如图2所示。
48.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
49.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。