1.本发明涉及光学技术领域,特别是涉及一种回音壁模式温度传感器及其制备方法。
背景技术:
2.在对环境温度进行检测时,现有的温度检测方式通常有液体测温法、热电偶测温法、电阻测温法以及红外线测温法等等。随着光学器件研究的不断深入逐渐拓宽,光学器件也逐渐应用至温度测量设备中。回音壁模式微腔技术是一种利用微腔的高品质因子的回音壁模式共振波长对外界刺激具有高灵敏度响应的特性实现传感的技术,具体为当光波在一个微球形共振腔内传播,并且入射角大于全反射临界角时,光将会限制在微球腔内形成闭合的回音壁模式。采用回音壁模式进行温度传感的装置,通常需要较大的耦合装置将为球形共振腔与检测区域进行耦合,然而,较大的耦合装置在进行传感检测时,由于体积较大,难以适用于空间狭小的环境下的检测。
技术实现要素:
3.基于此,有必要针对现有的回音壁模式传感装置体积较大的问题,提供一种回音壁模式温度传感器及其制备方法。
4.一种回音壁模式温度传感器的制备方法,包括如下步骤:
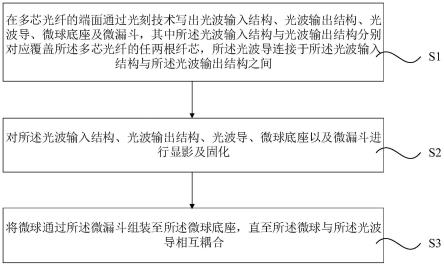
5.在多芯光纤的端面通过光刻技术写出光波输入结构、光波输出结构、光波导、微球底座及微漏斗,其中所述光波输入结构与光波输出结构分别对应覆盖所述多芯光纤的任两根纤芯,所述光波导连接于所述光波输入结构与所述光波输出结构之间;
6.对所述光波输入结构、光波输出结构、光波导、微球底座以及微漏斗进行显影及固化;
7.将微球通过所述微漏斗组装至所述微球底座,直至所述微球与所述光波导相互耦合。
8.上述回音壁模式温度传感器的制备方法,通过将光波输入结构、光波输出结构、光波导、微球底座以及微漏斗通过光刻技术写在多芯光纤的端面,能够有效地缩小回音壁模式温度传感器所需的空间,并且能够实现光波输入结构、光波输出结构与多芯光纤的高效耦合,有利于提升多芯光纤中信号光的利用效率以及回音壁模式温度传感器的测量准确性;通过光波输入结构、光波输出结构分别对应覆盖多芯光纤的任两根纤芯,能够实现光波输入结构、光波输出结构与多芯光纤的高效耦合,提升多芯光纤内的信息利用率,从而提升回音壁模式温度传感器的测量稳定性;通过光波导与微球之间相互耦合,从而光线在光波导外侧形成的倏逝波能够耦合入微球腔中并于微球腔中形成共振,进而激发微球腔的回音壁模式,因此能够实现对温度进行检测;通过使用微漏斗将微球组装至微球底座,能够提升微球的组装定位准确度与组装效率,从而有助于提升回音壁模式温度传感器的稳定性、减少测量误差。使用上述制备方法制备出的回音壁模式温度传感器,具有空间需求小、测量准
确性高等特点,能够适应空间狭小环境下的温度检测。
9.在其中一个实施例中,步骤“在多芯光纤的端面通过光刻技术写出光波输入结构、光波输出结构、光波导、微球底座及微漏斗”中,还包括如下步骤:
10.在多芯光纤的端面通过光刻技术写出包括依次连接的微柱、全反射棱镜及微锥体的光波输入结构;和/或,
11.在多芯光纤的端面通过光刻技术写出包括依次连接的微柱、全反射棱镜及微椎体的光波输出结构。
12.在其中一个实施例中,步骤“对所述微型结构进行显影及固化”之后,还包括如下步骤:
13.将所述光波输入结构、光波输出结构置于真空环境中;
14.于所述全反射棱镜的反射面蒸镀金属薄膜。
15.在其中一个实施例中,步骤“在多芯光纤的端面通过光刻技术写出光波输入结构、光波输出结构、光波导、微球底座及微漏斗”中,还包括如下步骤:
16.在多芯光纤的端面通过光刻技术写出微漏斗外壁,所述微漏斗外壁位于所述微球底座、微漏斗、光波输入结构及光波输出结构的外周。
17.在其中一个实施例中,在步骤“在多芯光纤的端面通过光刻技术写出光波输入结构、光波输出结构、光波导、微球底座及微漏斗”之前,还包括如下步骤:
18.剥除所述多芯光纤的包层;
19.对多芯光纤的端面进行切割处理。
20.在其中一个实施例中,在步骤“将微球通过所述微漏斗组装至所述微球底座”之后,包括如下步骤:
21.使用胶水对所述多芯光纤的端面、光波输入结构、光波输出结构、光波导、微球底座以及微漏斗进行封装。
22.一种回音壁模式温度传感器,包括:
23.多芯光纤,所述多芯光纤的内部设有多根纤芯用于传递信号光;
24.所述多芯光纤的其中一个端面设有光波输入结构、光波输出结构以及光波导,其中所述光波输入结构与光波输出结构分别对应覆盖所述多芯光纤的任两根纤芯,所述光波导连接于所述光波输入结构与所述光波输出结构之间;
25.微球底座,所述微球底座设置于所述端面;
26.微球,所述微球设置于所述微球底座,所述微球的内部设有微球腔,所述微球与所述光波导相互耦合。
27.上述回音壁模式温度传感器,通过将光波输入结构、光波输出结构、光波导、微球底座以及微漏斗设置于多芯光纤的端面,能够有效地缩小回音壁模式温度传感器所需的空间,并且能够实现光波输入结构、光波输出结构与多芯光纤的高效耦合,有利于提升多芯光纤中信号光的利用效率以及回音壁模式温度传感器的测量准确性;通过光波输入结构、光波输出结构分别对应覆盖多芯光纤的任两根纤芯,能够实现光波输入结构、光波输出结构与多芯光纤的高效耦合,提升多芯光纤内的信息利用率,从而提升回音壁模式温度传感器的测量稳定性;通过光波导与微球之间相互耦合,从而光线在光波导外侧形成的倏逝波能够耦合入微球腔中并于微球腔中形成共振,进而激发微球腔的回音壁模式,因此能够实现
对温度进行检测;通过微球设置于微漏斗内,能够便于微球与微型结构的组装,同时微漏斗也能够起到利用表面张力将液体吸至微球外侧的效果,增加微球与溶液体的接触面积,从而提升回音壁模式传感器的检测效率与检测准确性。上述回音壁模式温度传感器,具有空间需求小、测量准确性高等特点,能够适应空间狭小环境下的温度检测。
28.在其中一个实施例中,所述回音壁模式温度传感器还包括微漏斗,所述微漏斗架设于所述微球底座远离所述端面的一侧。
29.在其中一个实施例中,所述光波输入结构与所述光波输出结构均包括依次连接的微柱、全反射棱镜及微椎体,所述微柱的一端连接于所述纤芯,所述微椎体的小端连接于所述光波导的其中一端。
30.在其中一个实施例中,所述全反射棱镜的反射面与所述端面之间的夹角范围为30
°‑
60
°
;和/或,
31.所述全反射棱镜的反射面设有金属薄膜。
32.在其中一个实施例中,所述金属薄膜的厚度范围为100nm-300nm;和/或,
33.所述金属薄膜的材质为黄金。
34.在其中一个实施例中,所述回音壁模式温度传感器还包括围设于所述微漏斗外的微漏斗外壁;和/或,
35.所述多芯光纤中纤芯的数量为6-8根;和/或,
36.所述光波导与所述微球之间的距离范围为0.8um-1.2um;和/或,
37.所述微球与所述端面之间的距离范围为4um-6um;和/或,
38.所述光波导垂直于长度方向的截面为矩形,所述光波导与所述端面之间的距离范围为18um-20um;和/或,
39.所述光波输入结构、光波输出结构、光波导、微球底座、微漏斗均为光刻胶材质。
附图说明
40.图1为一实施例的回音壁模式温度传感器的制备方法的流程图;
41.图2为一实施例的回音壁模式温度传感器的制备方法的流程图;
42.图3为一实施例的回音壁模式温度传感器的部分结构示意图;
43.图4为一实施例的回音壁模式温度传感器的部分结构示意图;
44.图5为一实施例的回音壁模式温度传感器的透视结构示意图;
45.图6为一实施例的回音壁模式温度传感器于不同温度中的光谱图;
46.图7为一实施例的回音壁模式温度传感器的灵敏度测试结果曲线图。
47.图中:
48.100、回音壁模式温度传感器;110、多芯光纤;120、微柱;121、全反射棱镜;122、微椎体;123、光波导;130、微球底座;131、微漏斗;132、微漏斗外壁;133、微球。
具体实施方式
49.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不
违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
50.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
51.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
52.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
53.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
54.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
55.一方面,本技术提供一种回音壁模式温度传感器的制备方法。请参考图1,一实施例的回音壁模式温度传感器的制备方法,包括如下步骤:
56.s1、在多芯光纤的端面通过光刻技术写出光波输入结构、光波输出结构、光波导、微球底座及微漏斗,其中所述光波输入结构与光波输出结构分别对应覆盖所述多芯光纤的任两根纤芯,所述光波导连接于所述光波输入结构与所述光波输出结构之间。
57.具体地,通过将光波输入结构、光波输出结构、光波导、微球底座以及微漏斗通过光刻技术写在多芯光纤的端面,能够有效地缩小回音壁模式温度传感器所需的空间,并且能够实现光波输入结构、光波输出结构与多芯光纤的高效耦合,有利于提升多芯光纤中信号光的利用效率以及回音壁模式温度传感器的测量准确。由于多芯光纤的长度通常能够根据传输距离进行延长或缩短,从而制备出的回音壁模式温度传感器能够进行远程监测,适用于更加丰富的应用场景。通过光波输入结构、光波输出结构分别对应覆盖多芯光纤的任两根纤芯,从而对应连接的纤芯内的信息能够最大程度地进入光波输入结构中,并通过光波导传输给光波输出结构,并能够最大程度地进入对应连接光波输出结构的纤芯之中,即实现光波输入结构、光波输出结构与多芯光纤的高效耦合,提升多芯光纤内的信息利用率,
从而提升回音壁模式温度传感器的测量稳定性。
58.在一些实施例中,光刻技术为使用3d光刻机实现的3d双光子飞秒激光光刻技术,通过使用光刻技术在多芯光纤的端面进行通过对光刻胶材质进行三维光刻,能够确定出光波输入结构、光波输出结构、光波导、微球底座以及微漏斗的结构形状,从而能够在步骤s2中进行显影及固化。需要说明的是,此处通过光刻技术写出的光波输入结构、光波输出结构、光波导、微球底座及微漏斗的形成顺序不分先后,以能够实现的最短轨迹的光刻顺序为佳。
59.在一些实施例中,多芯光纤为七芯光纤,从而能够实现光信息的高速、大容量传输。在其他实施例中,多芯光纤也可为双芯光纤、四芯光纤、六芯光纤等纤芯数量至少为两根的多芯光纤。具体地,七芯光纤为七芯单模光纤,从而能够为光信息的传递提供较大的带宽,并且提升光信息的传输速度。
60.s2、对所述光波输入结构、光波输出结构、光波导、微球底座以及微漏斗进行显影及固化。
61.具体地,光波输入结构、光波输出结构、光波导、微球底座以及微漏斗均为光刻胶材料,从而能够实现显影及固化。光刻胶材料可为正胶或负胶,当光刻胶材料为正胶时,正胶的非曝光区域为所需结构的形状,曝光区域则在显影过程中溶解于显影液;当光刻胶材料为负胶时,负胶的曝光区域为所需结构的形状,非曝光区域则在显影过程中溶解于显影液。在一些实施例中,光波输入结构、光波输出结构、光波导、微球底座以及微漏斗为负胶,从而有助于立体结构的形成,并且有助于减少光刻胶材料的损耗、降低制造成本。具体地,光波输入结构、光波输出结构、光波导、微球底座以及微漏斗可以通过放置于有机溶液中实现固化,或者,也可以通过烘烤环境实现固化。在一些实施例中,有机溶液可为异丙醇等。
62.s3、将微球通过所述微漏斗组装至所述微球底座,直至所述微球与所述光波导相互耦合。
63.具体地,微球通过微漏斗组装至微球底座所使用的方式为模板辅助自组装方法,模板辅助自组装的方法是指通过液体的表面张力实现微球自组装至微球底座,使得微球能够更快地从无序状态进入有序状态,即微球能够更快地与微球底座实现组合,从而能够提升组装效率,缩短制备方法所需的时间。具体地,微球底座设于微漏斗与多芯光纤的端面之间,用于固定微球的位置,并且能够控制微球内的微球腔与光波导之间的耦合距离。具体地,微球为高分子材料制成,如聚丁二烯、聚异戊二烯或聚苯乙烯等。在一些实施例中,微球为聚苯乙烯微球,聚苯乙烯微球具有粒径小、相对稳定性好、疏水性强、粘附性低等较为优异的物理特性,从而能够使制备出的回音壁模式温度传感器具有响应速度快、尺寸小、使用稳定性高以及方便组装的特点。
64.具体地,由于光信息在光波导内传播时,光波导相当于光密介质,气体环境或液体环境相当于光疏介质,从而光波导的外侧会形成倏逝波,倏逝波则是指当光信息从光密介质入射到光疏介质时,发生全反射而光疏介质一侧所产生的一种电磁波。倏逝波的具体形成原理为:在光密介质内,反射波与入射波干涉,在界面附近形成驻波,而极小部分的能量会渗入光疏介质并沿着界面传播一段距离,此即为倏逝波。具体地,微球与光波导相互耦合则是指:光波导外侧形成的倏逝波能够进入微球内的微球腔中,在微球腔的内部产生回音壁模式共振,并且能够传递回光波导中的一种连接方式,即微球与光波导之间的距离位于
光波导形成的倏逝波能够传输的距离范围之内。
65.在一些实施例中,光波导与微球之间的最短距离的范围为0.8um-1.2um,从而光波导外侧形成的倏逝波能够更有效地耦合入微球腔中,即能够保证光波导与微球的临界耦合,避免二者之间过耦合或欠耦合而影响光信息的传递,同时能够减少光信息的损耗,提升制备出的回音壁模式温度传感器的品质因子。具体地,光波导与微球之间的最短距离可以为0.932、0.980、1.000、1.025或1.060等(单位均为um)。
66.使用上述制备方法制作出的回音壁模式温度传感器,其工作原理为:将回音壁模式温度传感器放置于需要测温的气体环境或液体环境中,多芯光纤中的光信息通过其中一根纤芯传递至光波输入结构,从而光信息通过设于光波输入结构与光波输出结构之间的光波导进行传递,光波导与微球相互耦合,从而光波导外侧形成的倏逝波耦合入微球内的微球腔中产生回音壁共振,共振后的光信息传递回光波导后进入光波输出结构,从而光信息返回多芯光纤中的另一根纤芯,即可实现温度的测量。由于变化环境的温度会对微球的有效折射率和温度产生变化,倏逝波在微球腔内的共振波长会发生偏移,从而能够通过微球反馈回的光信息反映出温度的变化,即实现对温度的测量。共振波长的量级通常为纳米级,因此使用上述制备方法制备出的回音壁模式温度传感器具备测量精度高、响应速度快、灵敏度高的特点。
67.上述回音壁模式温度传感器的制备方法,通过将光波输入结构、光波输出结构、光波导、微球底座以及微漏斗通过光刻技术写在多芯光纤的端面,能够有效地缩小回音壁模式温度传感器所需的空间,并且能够实现光波输入结构、光波输出结构与多芯光纤的高效耦合,有利于提升多芯光纤中信号光的利用效率以及回音壁模式温度传感器的测量准确性;通过光波输入结构、光波输出结构分别对应覆盖多芯光纤的任两根纤芯,能够实现光波输入结构、光波输出结构与多芯光纤的高效耦合,提升多芯光纤内的信息利用率,从而提升回音壁模式温度传感器的测量稳定性;通过光波导与微球之间相互耦合,从而光线在光波导外侧形成的倏逝波能够耦合入微球腔中并于微球腔中形成共振,进而激发微球腔的回音壁模式,因此能够实现对温度进行检测;通过使用微漏斗将微球组装至微球底座,能够提升微球的组装定位准确度与组装效率,从而有助于提升回音壁模式温度传感器的稳定性、减少测量误差;由于多芯光纤的长度通常能够根据传输距离进行延长或缩短,从而制备出的回音壁模式温度传感器能够进行远程监测,适用于更加丰富的应用场景。使用上述制备方法制备出的回音壁模式温度传感器,具有空间需求小、测量准确性高、测量距离长等特点,能够适应空间狭小环境下的温度检测。
68.请参考图2,在一些实施例中,步骤s1中,包括如下步骤:
69.s1-1、在多芯光纤的端面通过光刻技术写出包括依次连接的微柱、全反射棱镜及微锥体的光波输入结构。
70.s1-2、在多芯光纤的端面通过光刻技术写出包括依次连接的微柱、全反射棱镜及微椎体的光波输出结构。
71.具体地,步骤s1-1与步骤s1-2可为并行或串行。具体地,微椎体的大端连接于微柱,微椎体的小端连接于光波导。其中,微柱用于多芯光纤中光信息的收集或反馈,全反射棱镜用于对光信息进行全反射以调节光路的传递方向,微椎体用于改变光信息的束径大小以实现光信息的会聚或发散。光信息的传递方向为:由多芯光纤的其中一根纤芯,发射光信
息至光波输入结构的微柱,之后光信息经过全反射棱镜改变传递方向后进入微椎体,微椎体将光信息会聚后耦合入光波导中,光波导外侧形成的倏逝波耦合入微球腔中形成共振反馈回光波导中,光波导将光信息耦合入光波输出结构的微椎体,微椎体将光信息进行发散后通过微柱传至多芯光纤的另一根纤芯中,从而实现光信息的输入与输出。由于光路传递的可逆性,本实施例的光波输入结构与光波输出结构可根据光信息的传播需求进行互换。在其他实施例中,光波输入结构、光波输出结构可为其他能够实现光路方向改变、聚焦光路功能的镜片或镜组。
72.在一些实施例中,步骤s1中,还包括如下步骤:
73.s1-3、在多芯光纤的端面通过光刻技术写出微漏斗外壁,所述微漏斗外壁位于所述微球底座、微漏斗、光波输入结构及光波输出结构的外周。
74.具体地,通过将微漏斗外壁围设在外周,能够进在后续微球进行组装的过程中能够更加精准地与微球底座进行连接。微漏斗外壁的作用为将多芯光纤端面的光波输入结构、光波输出结构、光波导、微漏斗、微球底座进行包覆,从而能够提升回音壁模式温度传感器的集成度与整体性。
75.在一些实施例中,步骤s1-1、s1-2、s2之后,还包括如下步骤:
76.s2-1、将所述光波输入结构、光波输出结构置于真空环境中。
77.具体地,通过将光波输入结构、光波输出结构置于真空环境中,有利于在后续进行金属薄膜蒸镀时,能够起到提升镀膜效率、防止金属氧化、金属薄膜致密等效果。
78.s2-2、于所述全反射棱镜的反射面蒸镀金属薄膜。
79.具体地,当回音壁模式温度传感器需要测量的环境中的折射率与光波输入结构、光波输出结构中全反射棱镜的折射率差距较小时,会影响光信息在全反射棱镜的反射面处产生的全反射,会造成一定程度的能量与信息损失。通过在全反射棱镜的反射面蒸镀金属薄膜,能够充分保证光信息在全反射棱镜中的反射率,从而保证光信息在传递过程中的完整性与准确性。在一些实施例中,金属薄膜所使用的材质为黄金,具有便于蒸镀、稳定性强、不易氧化等特点。在一些实施例中,金属薄膜的厚度范围为100nm-300nm,从而既能够保证蒸镀出金属薄膜的致密性,又能够节省金属原料的成本。
80.进一步地,若光波导在真空蒸镀的过程中被金属覆盖,会影响光波导与微球之间的耦合效率,从而降低回音壁模式温度传感器的实用性与测量效率。在一些实施例中,微漏斗的外沿于多芯光纤端面上的投影范围位于全反射棱镜的反射面与光波导分别在端面上的投影之间。从而,当对全反射棱镜的反射面进行真空蒸镀时,微漏斗能够起到保护光波导不被金属覆盖、同时金属能够覆盖于全反射棱镜的反射面的作用,以确保回音壁模式温度传感器的功能性完整。
81.在一些实施例中,在步骤s1之前,还包括如下步骤:
82.s0-1、剥除所述多芯光纤的包层。
83.具体地,可通过使用光纤剥线钳实现多芯光纤包层的剥除,从而能够便于后续步骤中对多芯光纤的端面进行切割。
84.s0-2、对多芯光纤的端面进行切割处理。
85.具体地,可通过使用光纤切割刀实现对多芯光纤的切割。通过对多芯光纤的端面进行切割处理,能够使端面保持平整,降低端面的粗糙度,有助于后续在多芯光纤的端面进
行光刻工艺,提升光波输入结构、光波输出结构分别与端面的耦合效率,并且降低光信息在端面处的损耗与波动,从而提升回音壁模式温度传感器的测量效率与测量准确性。
86.在一些实施例中,在步骤s3之后,包括如下步骤:
87.s4、使用胶水对所述多芯光纤的端面、光波输入结构、光波输出结构、光波导、微球底座以及微漏斗进行封装。
88.具体地,通过对多芯光纤的端面的结构进行封装,能够在一定程度上抵抗外界环境对各个结构形成的干扰,并且能够保证各个结构之间位置的相对固定,从而提升回音壁模式温度传感器的牢固性,在转运、使用等过程中保持结构完整,提升回音壁模式温度传感器的品质。具体地,步骤s4中所使用的胶水为低折射率胶水,以减少胶水封装对光波输入结构、光波输出结构、光波导中的光路产生的影响。
89.另一方面,本技术还提供一种回音壁模式温度传感器100。请参考图3至图5(图3、图4中未示出微球133),一实施例的回音壁模式温度传感器100,包括:多芯光纤110、光波输入结构、光波输出结构、光波导123、微球底座130以及微球133。
90.具体地,多芯光纤110的内部设有多根纤芯用于传递信号光。在一些实施例中,多芯光纤110为七芯光纤,从而能够实现光信息的高速、大容量传输。在其他实施例中,多芯光纤110也可为双芯光纤、四芯光纤、六芯光纤等纤芯数量至少为两根的多芯光纤110。具体地,七芯光纤为七芯单模光纤,从而能够为光信息的传递提供较大的带宽,并且提升光信息的传输速度。由于多芯光纤110的长度通常能够根据传输距离进行延长或缩短,从而回音壁模式温度传感器100能够进行远程监测,适用于更加丰富的应用场景。更进一步的,多芯光纤110中的纤芯数量范围为6-8根,在此范围内能够有使得多芯光纤110兼具大容量传输、光纤直径合理的特点。
91.具体地,光波输入结构与光波输出结构分别对应覆盖多芯光纤110的任两根纤芯,光波导123连接于光波输入结构与光波输出结构之间。从而与光波输入结构对应连接的纤芯内的信息能够最大程度地进入光波输入结构中,并通过光波导123传输给光波输出结构,并能够最大程度地进入对应连接光波输出结构的纤芯之中,即实现光波输入结构、光波输出结构与多芯光纤110的高效耦合,提升多芯光纤110内的信息利用率,从而提升回音壁模式温度传感器100的测量稳定性。
92.具体地,微球底座130设置于端面。微球底座130设于微球133与多芯光纤110的端面之间,用于固定微球133的位置,并且能够控制微球133内的微球腔与光波导123之间的耦合距离。
93.具体地,微球133设置于微球底座130,微球133的内部设有微球腔。具体地,微球133为高分子材料制成,如聚丁二烯、聚异戊二烯或聚苯乙烯等。在一些实施例中,微球133为聚苯乙烯微球133,聚苯乙烯微球133具有粒径小、相对稳定性好、疏水性强、粘附性低等较为优异的物理特性,从而能够使制备出的回音壁模式温度传感器100具有响应速度快、尺寸小、使用稳定性高以及方便组装的特点。
94.具体地,微球133与光波导123相互耦合。由于光信息在光波导123内传播时,光波导123相当于光密介质,气体环境或液体环境相当于光疏介质,从而光波导123的外侧会形成倏逝波,倏逝波则是指当光信息从光密介质入射到光疏介质时,发生全反射而光疏介质一侧所产生的一种电磁波。倏逝波的具体形成原理为:在光密介质内,反射波与入射波干
涉,在界面附近形成驻波,而极小部分的能量会渗入光疏介质并沿着界面传播一段距离,此即为倏逝波。具体地,微球133与光波导123相互耦合则是指:光波导123外侧形成的倏逝波能够进入微球133内的微球腔中,在微球腔的内部产生回音壁模式共振,并且能够传递回光波导123中的一种连接方式,即微球133与光波导123之间的距离位于光波导123形成的倏逝波能够传输的距离范围之内。
95.在一些实施例中,光波导123与微球133之间的最短距离的范围为0.9um-1.1um,从而光波导123外侧形成的倏逝波能够更有效地耦合入微球腔中,即能够保证光波导123与微球133的临界耦合,避免二者之间过耦合或欠耦合而影响光信息的传递,同时能够减少光信息的损耗,提升制备出的回音壁模式温度传感器100的品质因子。具体地,光波导123与微球133之间的最短距离可以为0.932、0.980、1.000、1.025或1.060等(单位均为um)。
96.在一些实施例中,上述光波输入结构、光波输出结构、光波导123、微漏斗131以及微球底座130均为光刻胶材料,可通过光刻技术实现成型。光刻胶材料可为正胶或负胶,当光刻胶材料为正胶时,正胶的非曝光区域为所需结构的形状,曝光区域则在显影过程中溶解于显影液;当光刻胶材料为负胶时,负胶的曝光区域为所需结构的形状,非曝光区域则在显影过程中溶解于显影液。在一些实施例中,光波输入结构、光波输出结构、光波导123、微球底座130以及微漏斗131为负胶,从而有助于立体结构的形成,并且有助于减少光刻胶材料的损耗、降低制造成本。
97.上述回音壁模式温度传感器100,其工作原理为:将回音壁模式温度传感器100放置于需要测温的气体环境或液体环境中,多芯光纤110中的光信息通过其中一根纤芯传递至光波输入结构,从而光信息通过设于光波输入结构与光波输出结构之间的光波导123进行传递,光波导123与微球133相互耦合,从而光波导123外侧形成的倏逝波耦合入微球133内的微球腔中产生回音壁共振,共振后的光信息传递回光波导123后进入光波输出结构,从而光信息返回多芯光纤110中的另一根纤芯,即可实现温度的测量。由于变化环境的温度会对微球133的有效折射率和温度产生变化,倏逝波在微球腔内的共振波长会发生偏移,从而能够通过微球133反馈回的光信息反映出温度的变化,即实现对温度的测量。共振波长的量级通常为纳米级,因此上述回音壁模式温度传感器100具备测量精度高、响应速度快、灵敏度高的特点。
98.上述回音壁模式温度传感器100,通过将光波输入结构、光波输出结构、光波导123、微球底座130以及微漏斗131设置于多芯光纤110的端面,能够有效地缩小回音壁模式温度传感器100所需的空间,并且能够实现光波输入结构、光波输出结构与多芯光纤110的高效耦合,有利于提升多芯光纤110中信号光的利用效率以及回音壁模式温度传感器100的测量准确性;通过光波输入结构、光波输出结构分别对应覆盖多芯光纤110的任两根纤芯,能够实现光波输入结构、光波输出结构与多芯光纤110的高效耦合,提升多芯光纤110内的信息利用率,从而提升回音壁模式温度传感器100的测量稳定性;通过光波导123与微球133之间相互耦合,从而光线在光波导123外侧形成的倏逝波能够耦合入微球腔中并于微球腔中形成共振,进而激发微球腔的回音壁模式,因此能够实现对温度进行检测;通过微球133设置于微漏斗131内,能够便于微球133与微型结构的组装,同时微漏斗131也能够起到利用表面张力将液体吸至微球133外侧的效果,增加微球133与溶液体的接触面积,从而提升回音壁模式传感器的检测效率与检测准确性;由于多芯光纤110的长度通常能够根据传输距
离进行延长或缩短,从而回音壁模式温度传感器100能够进行远程监测,适用于更加丰富的应用场景。上述回音壁模式温度传感器100,具有空间需求小、测量准确性高、测量距离长等特点,能够适应空间狭小环境下的温度检测。
99.在一些实施例中,回音壁模式温度传感器100还包括微漏斗131,具体地,微漏斗131架设于微球底座130远离端面的一侧。从而微球133能够通过微漏斗131组装至微球底座130,应用模板辅助自组装的方法使得微球133能够更快地从无序状态进入有序状态,即微球133能够更快地与微球底座130实现组合,从而能够提升回音壁模式温度传感器100的组装效率。具体地,微球底座130设于微漏斗131与多芯光纤110的端面之间,用于固定微球133的位置,并且能够控制微球133内的微球腔与光波导123之间的耦合距离。
100.在一些实施例中,光波输入结构与光波输出结构均包括依次连接的微柱120、全反射棱镜121及微椎体122,微柱120的一端连接于纤芯,微椎体122的小端连接于光波导123的其中一端。其中,微柱120用于多芯光纤110中光信息的收集或反馈,全反射棱镜121用于对光信息进行全反射以调节光路的传递方向,微椎体122用于改变光信息的束径大小以实现光信息的会聚或发散。光信息的传递方向为:由多芯光纤110的其中一根纤芯,发射光信息至光波输入结构的微柱120,之后光信息经过全反射棱镜121改变传递方向后进入微椎体122,微椎体122将光信息会聚后耦合入光波导123中,光波导123外侧形成的倏逝波耦合入微球腔中形成共振反馈回光波导123中,光波导123将光信息耦合入光波输出结构的微椎体122,微椎体122将光信息进行发散后通过微柱120传至多芯光纤110的另一根纤芯中,从而实现光信息的输入与输出。由于光路传递的可逆性,本实施例的光波输入结构与光波输出结构可根据光信息的传播需求进行互换。在其他实施例中,光波输入结构、光波输出结构可为其他能够实现光路方向改变、聚焦光路功能的镜片或镜组。
101.在一些实施例中,全反射棱镜121的反射面与端面之间的夹角范围为30
°‑
60
°
,当夹角在此范围内时,通过微椎体122连接于全反射棱镜121的光波导123能够在微球133的周围并与微球133相互耦合。具体地,全反射棱镜121的反射面与端面之间的夹角可为:35
°
、40
°
、45
°
、50
°
或55
°
等。
102.在一些实施例中,全反射棱镜121的反射面设有金属薄膜。具体地,当回音壁模式温度传感器100需要测量的环境中的折射率与光波输入结构、光波输出结构中全反射棱镜121的折射率差距较小时,会影响光信息在全反射棱镜121的反射面处产生的全反射,会造成一定程度的能量与信息损失。通过在全反射棱镜121的反射面蒸镀金属薄膜,能够充分保证光信息在全反射棱镜121中的反射率,从而保证光信息在传递过程中的完整性与准确性。
103.具体地,金属薄膜为通过在全反射棱镜121的反射面进行真空环境的热蒸镀工艺形成。进一步地,若光波导123被金属覆盖,会影响光波导123与微球133之间的耦合效率,从而降低回音壁模式温度传感器100的实用性与测量效率。在一些实施例中,微漏斗131的外沿于多芯光纤110端面上的投影范围位于全反射棱镜121的反射面与光波导123分别在端面上的投影之间。从而,微漏斗131能够起到在制备过程中的蒸镀环节保护光波导123不被金属覆盖、同时金属能够覆盖于全反射棱镜121的反射面的作用,以确保回音壁模式温度传感器100的功能性完整。
104.在一些实施例中,金属薄膜所使用的材质为黄金,具有便于蒸镀、稳定性强、不易氧化等特点。在一些实施例中,金属薄膜的厚度范围为100nm-300nm,从而既能够保证蒸镀
出金属薄膜的致密性,又能够节省金属原料的成本。具体地,金属薄膜的厚度可以为:125、150、175、200、225、250或275等(单位均为nm)。
105.在一些实施例中,回音壁模式温度传感器100还包括围设于微漏斗131外的微漏斗外壁132。通过将微漏斗外壁132围设在外周,便于微球133更加精准地与微球底座130进行连接。微漏斗外壁132的作用为将多芯光纤110端面的光波输入结构、光波输出结构、光波导123、微漏斗131、微球底座130进行包覆,从而能够提升回音壁模式温度传感器100的集成度与整体性。
106.在一些实施例中,光波导123与微球133之间的最短距离的范围为0.8um-1.2um,,从而光波导123外侧形成的倏逝波能够更有效地耦合入微球腔中,即能够保证光波导123与微球133的临界耦合,避免二者之间过耦合或欠耦合而影响光信息的传递,同时能够减少光信息的损耗,提升制备出的回音壁模式温度传感器100的品质因子。具体地,光波导123与微球133之间的最短距离可以为0.932、0.980、1.000、1.025或1.060等(单位均为um)。
107.在一些实施例中,微球133与端面之间的距离范围为4um-6um,能够防止纤芯中的光信号能量对微球腔内产生的共振起到影响,同时能够减小光信息的传播路径长度,具体地,微球133与端面之间的距离可以为4.5、5.0或5.5等(单位均为um)。
108.在一些实施例中,光波导123垂直于长度方向的截面为矩形,能够保证光信号在传递的过程中具有较高的光密度与均一性,同时能够减少光信号在光波导123中的损耗,从而提升光信号的传递效率。进一步地,光波导123与端面之间的距离范围为18um-20um,从而能够防止纤芯中的光信号能量对光波导123内的光信号产生干扰,提升回音壁模式温度传感器100的检测准确度。具体地,光波导123与端面之间的距离可以为:18.6、18.8、19.0、19.4或19.8等(单位均为um)。
109.在一些更为具体的实施例中:多芯光纤110的直径为124.5um,多芯光纤110中的纤芯直径为6um,每对纤芯之间的最远距离为70um;微柱120的长度、宽度、高度均为8um;全反射棱镜121与端面之间的夹角为45
°
,长度、宽度、高度均为8um;微椎体122的长度为20um;微球底座130靠近端面的一侧的外半径为23um,壁厚为3um,沿多芯光纤110长度方向的高度为11um;微漏斗131外沿的最大半径为44um,壁厚为2.5um,高度为43um;微漏斗外壁132的最大半径为47um,壁厚为2um,高度为50um;光波导123的长度为22um,宽度、高度均为1um,与端面之间的距离为19um;微球133内微球腔的直径为30um,折射率为1.59,与光波导123之间的距离为1.0um,与端面之间的最短距离为5um;金属薄膜的厚度为200nm。
110.在一些实施例中,使用回音壁模式温度传感器100进行温度检测时,所使用的光信号的波段为1520nm-1570nm。请参考图6,图6为一实施例的回音壁模式温度传感器100于不同温度中的光谱图。为表征其对温度的传感性能,通过将回音壁模式温度传感器100放在液体环境中,逐渐改变液体的温度,从图6中可以看出,随着温度的增加,微球腔内光信号的共振峰发生红移。在光信号的波长为1520nm-1570nm波段的光谱,可以看尖锐的共振峰即为回音壁模式。在光信号的波长为1535nm处,能够得到品质因子为2880,该共振峰为光波导123与微球133内的微球腔相互作用而成,光波导123与微球腔之间的距离为1um、微球腔的直径为30um。因此可以得出,本技术的回音壁模式温度传感器100能够对环境温度的变化做出光信号的回馈,同时对温度变化的敏感性较高,具有较高的测量精度。
111.请参考图7,图为一实施例的回音壁模式温度传感器100的灵敏度测试结果曲线
图。图7中,横坐标为不同温度,纵坐标为波长偏移量,由实验结果和拟合结果可以看出,温度和波长偏移量成线性关系
△
λ=-0.03164t 0.81957。由图中数据计算可得,本技术的回音壁模式温度传感器100对温度的检测灵敏度可达到31.64pm/℃,具有良好的温度感测效果。
112.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
113.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
