技术特征:
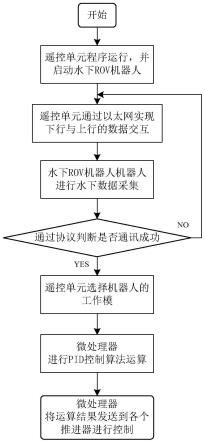
1.一种水下rov机器人的控制系统,其特征在于,包括:位于地面的水上控制系统和位于水下rov机器人的水下控制系统;所述水上控制系统包括遥控单元,用于接收工作模式的选择指令和所述水下控制系统采集的数据,向所述水下控制系统发送航姿控制指令;所述水下控制系统包括数据采集单元、微处理器和运动控制单元;所述数据采集单元实时采集的数据包括所述水下rov机器人的航姿数据和周围的图像;所述运动控制单元包括位于所述水下rov机器人不同方向位置的多个推进器;所述微处理器接收所述实时采集的数据以及所述航姿控制指令,对不同方向位置的推进器的推力值进行计算并发送至相应的推进器,控制所述位于水下rov机器人实现贴壁动作和多种运动动作。2.根据权利要求1所述的水下rov机器人的控制系统,其特征在于,所述水下控制系统还包括数据收发单元,所述数据收发单元与所述遥控单元通过网口的方式进行通讯,数据进行交互时打包为不同的报文帧,报文帧设置地址标识符及crc校验,通过判断地址标识符与crc校验进行数据处理,并依次的对数据进行发送及接收。3.根据权利要求1所述的水下rov机器人的控制系统,其特征在于,所述工作模式为自动工作模式时,所述遥控单元向所述微处理器发送航姿控制指令,所述微处理器采用串级pid的控制算法对运动控制单元进行双闭环控制;所述串级pid包括角度环pid控制器和角速度环pid控制器;所述角度环pid控制器根据期望角度与实际角度做差获得角度偏差值,然后根据角度闭环pid进行偏差调整获得期望角速度,将所述期望角速度传输到角速度pid控制器,形成角度环;角速度环pid控制器根据期望角速度结合水下rov机器人实时的实际角速度反馈值,输出推力值,并转换成pwm占空比控制相应的推进器,形成角速度环。4.根据权利要求3所述的水下rov机器人的控制系统,其特征在于,所述微处理器根据所述航姿控制指令执行姿态闭环控制过程:计算水下机器人俯仰角pid值、横滚角pid值,横滚角pid值、俯仰角pid值带有正负号;通过串级pid的控制算法计算水下rov机器人垂推推进器的pid输出值,进一步得到推力值,控制俯仰角、横滚角的推力方向;所述推力值施加到每个垂推推进器上。5.根据权利要求3所述的水下rov机器人的控制系统,其特征在于,所述微处理根据所述航姿控制指令执行深度闭环控制过程:计算水下机器人水深深度pid值,水深pid值带有正负号;通过串级pid的控制算法计算水下rov机器人垂推推进器的pid输出值,进一步得到推力值,控制垂直推力方向;所述推力值施加到每个垂推推进器上。6.根据权利要求3所述的水下rov机器人的控制系统,其特征在于,所述微处理根据所述航姿控制指令执行航向闭环控制过程:计算水下机器人航向角pid值,航向角pid值带有正负号;通过串级pid的控制算法计算水下rov机器人进退推进器的pid输出值,进一步得到推
力值,控制航向角的推力方向;所述推力值施加到前后每个进退推进器上。7.根据权利要求3所述的水下rov机器人的控制系统,其特征在于,所述微处理根据所述航姿控制指令执行自动贴壁控制过程:所述所述数据采集单元测量水下rov机器人到壁面的实际距离;根据所述实际距离计算横滚角pid值、俯仰角pid值、航向角pid值和水深pid值,俯仰角pid值、横滚角pid值、水深pid值、航向角pid值带有正负号;通过串级pid的控制算法计算相应推进器的pid输出值,进一步得到推力值,将所述推力值叠加到水下rov机器人侧推推进器中;随着壁面角度的不断变化,根据获得的实际距离进行实时的姿态及壁面贴合程度的调整。8.根据权利要求1所述的水下rov机器人的控制系统,其特征在于,所述工作模式为手动工作模式时,所述遥控单元计算出推进器的推力值并将推力值下发至所述微处理器,实现对水下rov机器人的姿态、定深、航向的控制。9.根据权利要求1所述的水下rov机器人的控制系统,其特征在于,所述航姿数据包括姿态、深度、距离、超短基线和速度的数据;所述航姿数据经过微处理器的融合算法处理后,发送至所述遥控单元进行显示及处理。10.根据权利要求1所述的水下rov机器人的控制系统,其特征在于,所述水上控制系统包括电源站,所述电源站中有光电转换器电力猫,用于将脐带缆中的光信号转换成电信号,为水下rov机器人供电的同时利用脐带缆通过电力载波实现网络通讯将数据回传到地面同时通过脐带缆的电力载波网络通讯将指令下发到水下rov机器人,实现水下与水上的信息交互。
技术总结
本发明提供了一种水下ROV机器人的控制系统,包括位于地面的水上控制系统和位于水下ROV机器人的水下控制系统;水上控制系统包括遥控单元,用于接收工作模式的选择指令和水下控制系统采集的数据,向水下控制系统发送航姿控制指令;水下控制系统包括数据采集单元、微处理器和运动控制单元;数据采集单元实时采集航姿数据和周围的图像;运动控制单元包括位于水下ROV机器人不同方向位置的多个推进器;微处理器接收实时采集的数据以及航姿控制指令,对不同方向位置的推进器的推力值进行计算,控制位于水下ROV机器人实现贴壁动作和多种运动动作。本发明能够大幅度的提高水下机器人的姿态稳定性、响应的速度性和位置的准确性。响应的速度性和位置的准确性。响应的速度性和位置的准确性。
技术研发人员:陈晓博 刘羽菁 李涛 车明
受保护的技术使用者:飞马滨(青岛)智能科技有限公司
技术研发日:2022.06.23
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。