1.本技术涉及电力变换装置。
背景技术:
2.作为以往的电力变换装置,例如有如下述的专利文献1公开的电路结构的例子。在该以往技术中,为了逆变器的低损耗化,将逆变器的动作设为能够相互选择并切换使用2电平动作和3电平动作。
3.现有技术文献
4.专利文献
5.专利文献1:日本专利第5386640号公报
技术实现要素:
6.这样,在以往的逆变器装置中,为了仅使逆变器低损耗化,有以相互选择并切换为2电平动作和3电平动作的方式使逆变器动作的例子,但未充分考虑降低和与逆变器连接的负载(例如马达)的合计损耗。因此,存在即使能够降低逆变器的损耗,马达的例如高频铁损增加,作为装置整体的合计损耗增加这样的课题。
7.另外,在电动车辆行驶用的逆变器装置的情况下,为了延长行驶距离,在由被称为wltc(worldwide harmonized light duty driving test cycle,全球轻型车辆测试循环)的燃料效率基准定义的行驶模式中,需要降低逆变器以及马达的整体损耗。
8.在将该wltc的行驶模式映射到马达的转速和转矩的相互间的特性(以下称为nt特性)上时,在wltc的行驶模式中,逆变器和马达在低电流区域中动作的模式多,所以在该区域中优选通过进行3电平动作,降低逆变器的开关损耗和马达的高次谐波铁损这双方而使合计损耗最小化,并且实现逆变器的小型化。
9.进而,在以往的电力变换装置中,即使在进行2电平动作的情况下,仅通过3电平动作用的相互串联连接的电容器进行动作,所以存在电容器的尺寸变大,阻碍小型化这样的课题。
10.本技术公开用于解决上述课题的技术,其目的在于提供能够使逆变器和马达的合计损耗降低、并且实现逆变器的小型化的电力变换装置。
11.本技术公开的电力变换装置具备驱动马达的逆变器,第1电容器以及具有相互串联地连接的多个电容器的第2电容器都并联地连接于直流电源,在所述逆变器与所述第2电容器之间连接具有多个开关元件的开关电路,另一方面,所述电力变换装置具备控制所述逆变器以及所述开关电路的控制电路,所述控制电路执行如下控制:根据针对所述马达的转矩指令以及转速指令,切换所述开关电路,在3电平动作时从所述第2电容器对所述逆变器供给电流,在2电平动作时从所述第1电容器以及所述第2电容器这双方对所述逆变器供给电流。
12.根据本技术公开的电力变换装置,根据预先设定的逆变器的动作映射而控制逆变
器和马达,使得根据逆变器的直流电源的电压和马达的转矩及转速使逆变器和马达的合计损耗成为最小,所以能够使逆变器和马达的合计损耗降低。
13.另外,通过将3电平动作的区域限制为与影响电动车辆的行驶距离的wltc动作模式时相当的低电流区域,能够抑制电容器的尺寸增加、并且实现逆变器的小型化。
附图说明
14.图1是本技术的实施方式1所涉及的电力变换装置的结构图。
15.图2是说明本技术的实施方式1所涉及的3电平动作时的电流路径的图。
16.图3是说明本技术的实施方式1所涉及的3电平动作时的其他电流路径的图。
17.图4是说明本技术的实施方式1所涉及的3电平动作时的进一步其他电流路径的图。
18.图5是示出在本技术的实施方式1中与3电平动作时的电流路径的变化相伴的逆变器的开关电压和马达的相电流的变化的关系的波形图。
19.图6是示出在逆变器仅进行2电平动作的情况下必要的电容器的结构的电路图。
20.图7是示出在逆变器仅进行3电平动作的情况下必要的电容器的结构的电路图。
21.图8是示出在逆变器相互切换进行2电平动作和3电平动作的情况下必要的电容器的结构(与本技术相当)的电路图。
22.图9是示出在本技术的实施方式1中使逆变器进行2电平动作的情况下的马达的相电流的随时间变化的波形图。
23.图10是示出在本技术的实施方式1中使逆变器进行3电平动作的情况下的马达的相电流的随时间变化的波形图。
24.图11是说明在本技术的实施方式1中关于马达损耗在2电平动作时和3电平动作时的差异的图。
25.图12是说明在本技术的实施方式1中关于逆变器损耗在2电平动作时和3电平动作时的差异的图。
26.图13是示出在本技术的实施方式1中用于预先制作用于使将马达损耗以及逆变器损耗合起来的装置整体的合计损耗最小化的动作映射的处理过程的流程图。
27.图14是示出在本技术的实施方式1中根据图13的流程图制作的动作映射的一个例子的说明图。
28.图15是分别示意地示出在本技术的实施方式1中相对逆变器电流(横轴)的逆变器和马达的合计损耗(左纵轴)以及逆变器的尺寸(右纵轴)的关系的特性图。
29.图16是本技术的实施方式2所涉及的电力变换装置的结构图。
30.(符号说明)
31.1:直流电源;2a、2b:第2电容器;2c:第1电容器;3:逆变器;3a~3f:开关元件;4:开关电路;4a~4f:开关元件;5:马达;6:控制电路。
具体实施方式
32.实施方式1.
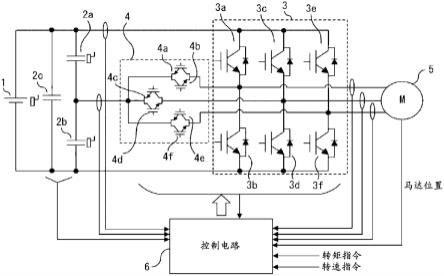
33.图1是本技术的实施方式1所涉及的电力变换装置的结构图。
34.该实施方式1的电力变换装置具备驱动马达5的3相用的逆变器3,并且相对直流电源1并联地连接有第1电容器2c以及相互串联地连接的一对电容器2a、2b(以下将这些电容器2a、2b称为第2电容器)。进而,对直流电源1连接逆变器3。
35.该逆变器3例如包括由igbt(insulated gate bipolar transistor,绝缘栅双极晶体管)与反并联地连接的二极管构成的6个开关元件3a~3f。
36.另外,在该逆变器3的3个交流输出端与第2电容器2a、2b的连接点之间连接有开关电路4,该开关电路4包括用一对对置的反向阻断的igbt构成的6个开关元件4a~4f。
37.具体而言,一对开关元件4a、4b与第2电容器2a、2b的中点和构成逆变器3的支路的一对开关元件3a、3b的中点连接,并且其他一对开关元件4c、4d与第2电容器2a、2b的中点和构成逆变器3的支路的一对开关元件3c、3d的中点连接,进而,其他一对开关元件4e、4f与第2电容器2a、2b的中点和构成逆变器3的支路的一对开关元件3e、3f的中点连接。另外,逆变器3的交流输出分别与马达5连接。
38.控制电路6为了关于2电平动作时和3电平动作时各自而计算将逆变器3和马达5的各损耗合起来的合计损耗,从未图示的设置于外部的传感器取入直流电源1的电压、第2电容器2a、2b的各电压以及流过的电流、逆变器3和开关电路4各自的温度等动作信息。另外,取入马达5的相电流以及旋转位置的信息,进而,取入从未图示的上位的控制器提供的转矩指令和转速指令的信息(nt特性的信息)。
39.然后,控制电路6根据如上所述取入的各种信息,为了以使逆变器3和马达5的合计损耗成为最小的方式选择并切换2电平动作和3电平动作,预先制作将用于根据逆变器3和马达5的动作状态降低损耗的逆变器3的载波频率的信息以及用于选择进行2电平动作还是进行3电平动作的区域定义在马达5的nt特性上的动作映射(参照后述图14),将该动作映射的信息登记到未图示的存储装置。
40.在对马达5进行驱动控制时,控制电路6参照该动作映射,根据马达5的转矩以及转速的指令值的信息、温度信息以及在第2电容器2a、2b中流过的电流的信息,决定逆变器3的载波频率以及进行2电平动作还是进行3电平动作,控制逆变器3以及开关电路4的动作。
41.图2~图4示出在使逆变器3进行3电平动作的情况下在第1、第2电容器2a~2c中流过的1相量的电流路径(在图中用粗实线表示)。另外,图5示出该情况下的逆变器3的开关电压和马达5的1相量的相电流的变化的关系。
42.在电流相位低而马达5的相电流小时,开关电路4成为接通而在第2电容器2a、2b中流过电流(图2、图3、以及图5的符号(a)、(b)所示的状态)。另一方面,在电流相位高而马达5的相电流大时,开关电路4成为断开而在第1电容器2c以及第2电容器2a、2b这双方中流过电流(图4、以及图5的符号(c)所示的状态)。
43.在根据向马达5的转矩指令和转速指令,针对逆变器3的马达相电流的指令值变大时,通过控制电路6的控制,逆变器3从3电平动作切换到2电平动作。在该情况下,开关电路4成为断开而在第1电容器2c以及第2电容器2a、2b这双方中流过电流。即,成为图4所示的电流路径。在切换到该2电平动作时,在各个电容器2a~2c中流过的电流理想的是以第1电容器2c的电容和第2电容器2a、2b的串联电容的电容比来分流。
44.一般而言,各个电容器2a~2c的尺寸与其电容值成比例,电容值影响马达5的转矩脉动或者逆变器3的耐电压,所以需要设为用于抑制电压脉动的电容值。另外,针对由于电
流脉动引起的电容器自身的发热,为了以成为容许温度以下的方式降低内部电阻,需要定义电容值。
45.图6是示出在逆变器3仅进行2电平动作的情况下必要的电容器的结构,图7是示出在仅进行3电平动作的情况下必要的电容器的结构,图8是示出在如本技术那样相互切换进行2电平动作和3电平动作的情况下必要的电容器的结构的电路图。
46.在此,为简化说明,将为了在逆变器3中流过最大电流而所需的电容器电容设为4c。
47.在仅进行2电平动作的情况下,如图6所示,相对直流电源1并联连接第1电容器2c,所以第1电容器2c的电容是4c。另外,在仅进行3电平动作的情况下,如图7所示,相对直流电源1并联连接第2电容器2a、2b,所以各个电容器2a、2b的电容需要8c而合计成为16c。另外,在如本技术那样相互切换进行2电平动作和3电平动作的情况下,如图8所示,相对直流电源1并联连接第1电容器2c和第2电容器2a、2b,所以第1电容器2c的电容需要3.5c,第2电容器2a、2b各自的电容需要1c,而合计成为5.5c。
48.因此,在将为了流过最大电流而所需的电容器电容设为4c、并且假设为体积与电容成比例时,在3电平结构(图7)中,从2电平结构(图6)的尺寸的增加比是4.0倍,相对于此,在本技术的结构(图8)中,从2电平结构(图6)的尺寸的增加比成为1.375倍。即,即使设为能够相互切换2电平动作和3电平动作的本技术的结构,也能够抑制电容器的尺寸增加。
49.图9是示出使逆变器进行2电平动作的情况下的马达5的相电流im(2lv)的随时间变化的波形图,图10是示出使逆变器以3电平动作的情况下的马达5的相电流im(3lv)的随时间变化的波形图。此外,在这些图中,同时还示出基于逆变器3的开关电压的变化。
50.在比较2电平动作时的相电流im(2lv)和3电平动作时的(相电流im(3lv)的波形时,2电平动作的电流波形相比于以3电平动作时的电流波形失真。其理由在于,关于用于生成电流的电压,在2电平动作的情况下,相比于3电平动作的情况,以成倍的电压vsw(=2
×
vsw/2)控制电流。其结果,在2电平动作时,相比于3电平动作时,马达5的高次谐波铁损更大。另外,马达5的转速越高,该倾向越显著。即,在马达5的转速变高时,相电流的1个周期内的开关次数变少,所以失真变大,在2电平动作时,相比于3电平动作时,高次谐波铁损增加。
51.图11示出关于2电平动作时和3电平动作时的马达损耗,并且图12示出关于2电平动作时和3电平动作时的逆变器损耗。
52.在此,马达损耗包括与马达5的驱动相伴的铁损、铜损以及机械损耗,特别是与相电流变化相伴的高频铁损的影响大。另外,逆变器损耗包含和与逆变器的驱动相伴的各开关元件3a~3f的接通/断开相伴的开关损耗、导通损耗以及电压恢复的恢复损耗。
53.从这些图可知,关于马达损耗(图11),如上所述,相比于2电平动作时,在3电平动作时,马达5的高次谐波铁损变小而马达损耗降低。将该情况下的从2电平动作时切换到3电平动作时的情况下的损耗的降低量设为δpm(将纵轴朝下设为正)。
54.另一方面,关于逆变器损耗(图12),不能肯定地说相比于2电平动作时,在3电平动作时损耗降低,由于3电平动作时在逆变器3中流过的电流量以及构成追加的开关电路4的元件的特性,根据逆变器3的动作状态,通过从2电平动作时切换到3电平动作时,不仅有逆变器损耗减少的情况(图12的符号(a)所示的情况),还有反而增加的情况(图12的符号(b)所示的情况)。将该图12(b)的情况下的从2电平动作时切换到3电平动作时的情况下的损耗
的增加量设为δpinv(将纵轴朝下设为正)。
55.因此,为了使将马达损耗和逆变器损耗合起来的装置整体的损耗最小化,使将它们合计的合计损耗的降低效果δp(=δpm δpinv)成为最大即可。
56.图13是示出用于为了使将马达损耗以及逆变器损耗合起来的装置整体的合计损耗最小化而预先制作登记到控制电路6的动作映射的处理过程的流程图。
57.首先,对马达5设定必要的转矩和转速的指令值(步骤1),计算在该情况下的逆变器3和马达5中分别在2电平动作时和3电平动作时产生的损耗(步骤2、3)。用于计算的参数是直流电源的电压、相电流、载波频率、调制率、功率因数、温度。
58.具体而言,关于逆变器损耗,使直流电源1的电压、马达5的相电流、调制率、载波频率、2电平动作时和3电平动作时各自的功率因数以及温度的各参数变化,而计算2电平动作时和3电平动作时各自的逆变器损耗(步骤2)。另外,关于马达损耗,使马达5的铜损、基波铁损、高频铁损、机械损耗以及温度的各参数变化,而计算2电平动作时和3电平动作时各自的马达损耗(步骤3)。
59.接下来,将使这些参数变化而得到的逆变器损耗以及马达损耗结合起来,计算逆变器3和马达5的合计损耗(步骤4)。接下来,求出合计损耗成为最小(换言之合计损耗的降低效果δp成为最大)的逆变器3的动作条件,将该逆变器3和马达5的合计损耗成为最小的动作条件映射到马达5的nt特性上,根据在wltc模式行驶时必要的转矩和转速的特性,限制执行3电平动作的区域(步骤5)。
60.即,预先制作将用于根据直流电源1的电压以及逆变器3和马达5的动作状态来降低合计损耗的逆变器3的载波频率的信息以及区分进行2电平动作的区域和进行3电平动作的区域的阈值shl的信息定义在马达5的nt特性上的动作映射(图14),并将该动作映射存储到控制电路6具备的未图示的存储装置等。
61.控制电路6在实际驱动马达5时,参照如上所述预先制作的动作映射,根据马达5的转矩以及转速的指令值的信息、温度信息以及在第2电容器2a、2b中流过的电流的信息,决定逆变器3的载波频率以及进行2电平动作还是进行3电平动作,控制逆变器3以及开关电路4的动作。在该进行2电平动作还是进行3电平动作的决定中,例如,在使逆变器3进行3电平动作的情况下的马达5的高次谐波铁损的降低量大于将逆变器3从2电平动作切换到3电平动作的情况下的逆变器3的损耗增加量的情况下,控制电路6决定使逆变器3进行3电平动作。
62.图14是示出根据上述图13的流程图所示的处理将用于选择进行2电平动作还是进行3电平动作的区域定义在表示马达5的转速n和转矩t的关系的nt特性上的动作映射的一个例子的说明图。
63.此外,图中的符号shl表示选择并切换3电平动作和2电平动作的阈值。另外,图中的符号tmax是示出针对马达5的转速n可取的最大转矩的曲线。
64.在此,在wltc模式中,向马达5的要求转矩成为阈值shl以下,所以选择3电平动作,但该区域比覆盖车辆的全部动作区域的逆变器3以及马达5的最大动作点低,处于低电流区域。
65.这样,在wltc模式行驶时进行3电平动作的理由在于,即便在nt特性上的全部区域中进行高效化,由于频度的关系而燃料效率的改善效果也少,反而在将3电平动作限定于对
燃料效率有效果的动作区域(利用电流的限制)、抑制追加的开关电路4、串联电容器2a、2b的尺寸增加时,更能实现合计损耗的降低化以及装置整体的小型化、低成本化。
66.另外,从图14可知,当马达5在同一转速下转矩增加而超过阈值shl时,从3电平动作切换到2电平动作。另外,在图中阈值shl被表示为大致水平的线,但在阈值shl为如右斜下那样的倾斜的线的情况下,当马达5在同一转矩下转速增加而超过阈值shl时,从3电平动作切换到2电平动作。另外,在图中阈值shl被表示为一条线,当然可以以使动作稳定的方式对阈值shl设置迟滞来设定动作状态,省略说明。
67.另外,关于载波频率,不论是3电平动作时的载波频率fx(3lv)、还是2电平动作时的载波频率fx(2lv),都在使马达5的转速n增加时载波频率也增加。即,3电平动作时的载波频率按照f1(3lv)
→
f2(3lv)
→
f3(3lv)增加。另外,2电平动作时的载波频率按照f1(2lv)
→
f2(2lv)
→
f3(2lv)增加。
68.进而,在比较3电平动作时的载波频率fx(3lv)和2电平动作时的载波频率fx(2lv)的情况下,不管马达5的转速n如何,设定成3电平动作时的载波频率fx(3lv)低于2电平动作时的载波频率fx(2lv)、即成为fx(2lv)》fx(3lv)。其原因为,在3电平动作时,限定于转矩t小的低电流区域而动作,所以逆变器损耗小,而且马达5的相电流的失真比2电平动作时的情况小(图10),所以能够相比于2电平动作时,降低高次谐波铁损,可靠地减少马达损耗,作为整体减小逆变器3和马达5的合计损耗。
69.此外,关于2电平动作时的载波频率,在降低逆变器3的开关频率时,开关损耗变少,但马达5的相电流的失真变大,马达5的高频铁损相反地增加。这样,载波频率成为对于逆变器3和马达5而言相反的参数,所以需要设定成确保马达5的控制性并且使逆变器3和马达5的合计损耗最小化。
70.图15是分别示意地示出相对在逆变器3中流过的电流iiv(横轴)的逆变器3和马达5的合计损耗lt(左纵轴)以及逆变器3的尺寸siz(或者成本)(右纵轴)的关系的特性图。
71.此处的逆变器3的尺寸siz是指,追加的开关电路4以及第2电容器2a、2b的尺寸以及驱动开关电路4的栅极驱动电路的尺寸。而且,在这些尺寸变大时,与其相伴地成本也增加。
72.为了设为能够切换2电平动作和3电平的动作的结构,需要针对进行2电平动作的结构的逆变器追加开关电路4、第2电容器2a、2b以及其栅极驱动电路这样的部件,并且在逆变器3中流过的电流iiv增加时,需要这些部件的耐电压,所以根据电流量而尺寸siz变大。
73.另一方面,关于损耗,在逆变器3的电流iiv变大时,关于逆变器3和马达5的合计损耗lt,如已与图12关联地说明的那样,通过从2电平动作时切换到3电平动作时,不仅有逆变器损耗减少而合计损耗降低的情况(图15中的符号lt1所示的线),还有反而逆变器损耗增加而合计损耗增加的情况(图6中的符号lt2所示的线)。
74.因此,在逆变器3的电流量比图中iiv0少的区域中,无需使逆变器3的尺寸siz不必要地增加而能够降低合计损耗lt。
75.如以上所述,本技术的实施方式1中的电力变换装置中将逆变器3设为能够选择并切换2电平动作和3电平动作的结构,利用在使逆变器3进行3电平动作的情况下存在将逆变器3的开关损耗和马达5的高次谐波铁损都能够降低的状态,预先制作以使逆变器3和马达5的合计损耗降低的方式将载波频率的信息以及区分进行2电平动作的区域和进行3电平动
作的区域的阈值shl的信息定义在马达5的nt特性上的动作映射并存储到控制电路6,根据该动作映射,使逆变器选择2电平动作和3电平动作,从而能够设定逆变器3和马达5的合计损耗成为最小的载波频率而动作。
76.另外,作为使成为车辆的燃料效率的指标的wltc模式行驶时的逆变器3和马达5的合计损耗最小化、并且为了2电平动作和3电平动作的切换成为可能而所需的部件,将第1电容器2c和相互串联连接的第2电容器2a、2b与直流电源1并联连接,从而能够抑制尺寸增加,能够实现逆变器3的小型化。
77.实施方式2.
78.在上述实施方式1的电力变换装置中,为了将逆变器3设为能够选择并切换2电平动作和3电平动作的结构,将附加到逆变器3的开关电路4设为使用反向阻断类型的igbt的结构。
79.相对于此,在该实施方式2中,如图16所示,将逆变器3以及开关电路4全部设为使用mos(metal-oxide-semiconductor,金属氧化物半导体)的结构,即使在采用该结构的情况下,也能够起到与实施方式1同样的作用、效果。
80.此外,本技术记载了各种例示性的实施方式,但在多个实施方式中记载的各种特征、方式以及功能不限于特定的实施方式的应用,能够单独或者以各种组合方式应用于实施方式。
81.因此,可在本技术公开的技术的范围内设想未例示的无数的变形例。例如,包括使至少一个构成要素变形的情况、追加的情况或者省略的情况、进而将至少一个构成要素抽出并与其他实施方式的构成要素组合的情况。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。