1.本实用新型涉及物流机器人技术领域,具体涉及一种可自动识别货号的物流机器人。
背景技术:
2.随着物流行业的飞速发展,物流系统也越来越智能化、数字化,物流机器人也广泛的引应用于物流系统中,物流机器是智能物流的基础,其不仅可以充分利用工作环境的空间,而且提高了货物的搬运能力,大大节约了装卸搬运过程中的作业时间。
3.但是现有的物流机器人在使用的时候仍然存在一定的缺陷,现有的物流机器人虽然能够将货物进行搬运,但是在使用的时候需要预先设定轨迹,操作麻烦,影响了货物的搬运效率,而且不能够精准识别货架的货号和货物的货号,容易出现货物不能被运送至指定货架的问题,因此我们有必要针对现有技术的不足而提供一种可自动识别货号的货流机器人。
技术实现要素:
4.为了克服现有技术中的不足,本实用新型提出一种可自动识别货号的物流机器人,其能够自动识别货物的货号和货架的货号,使得物流机器人能够将货物运输到指定货架位置。
5.为了实现上述目的,本实用新型的一种可自动识别货号的物流机器人,包括物流机构和扫描机构,扫描机构设置在物流机构上并随着物流机构一同移动;
6.物流机构包括底座、车架和置物板,底座内部设置驱动电机并驱动底部的主动轮转动,底座的外侧焊接车架,车架底部四角位置设置滚轮,车架的顶部水平设置置物板;
7.扫描机构包括支架、丝杆和第一扫描镜头,支架一端固定连接在底座上、另一端端部设置控制面板,支架底部的侧壁水平设置支撑座,支撑座上垂直设置丝杆,丝杆顶部穿过电机座,电机座上安装伺服电机,伺服电机的输出轴连接丝杆的顶端,丝杆上通过螺纹旋接滑座,滑座端部水平设置第一扫描镜头。
8.优选的,置物板水平设置在底座的正上方,并且置物板通过螺栓固定连接底座的上端面。
9.优选的,支架顶部侧壁水平连接连杆,连杆端部垂直设置第二扫描镜头,第二扫描镜头垂直向下正对置物板的中心。
10.优选的,支架的侧壁上垂直设置导向架,导向架上由上之下开设剖面呈“t”形结构的导轨,滑座的侧壁上也凸设呈“t”形结构的滑块,滑块伸入到导轨内并沿导轨上下滑动。
11.优选的,控制面板通过数据线连接小车、第一扫描镜头和第二扫描镜头。
12.本实用新型具有以下有益效果:
13.本实用新型提出的一种可自动识别货号的物流机器人,采用第一扫描镜头可以用于扫描并识别货架上的货架号,并可以通过第二扫描镜头来识别搬运货物的货号,使得物
流机器人能够将货物精准的配送到指定的货架位置,同时第一扫描镜头在伺服电机的驱动下上下活动调节位置,使得第一扫描镜头能够精准扫描到各个位置。
附图说明
14.下面结合附图对本实用新型作进一步描写和阐述。
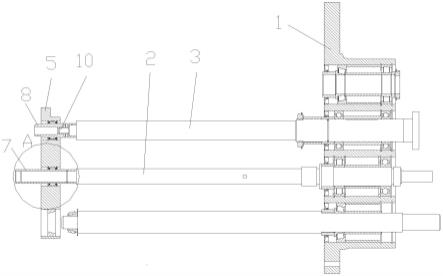
15.图1是本实用新型提出的一种可自动识别货号的物流机器人整体结构示意图。
16.图2是图1中物流机器人的物流机构结构示意图。
17.图3是图1中物流机器人的扫描机构结构示意图。
18.附图标记:1、物流机构;1-1、底座;1-2、主动轮;1-3、车架;1-4、滚轮;1-5、置物板;2、扫描机构;2-1、支架;2-2、丝杆;2-3、电机座;2-4、伺服电机;2-5、滑座;2-6、第一扫描镜头;2-7、滑块;2-8、导轨;2-9、控制面板;2-10、连杆;2-11、第二扫描镜头;2-12、支撑座。
具体实施方式
19.下面将结合附图、通过对本实用新型的优选实施方式的描述,更加清楚、完整地阐述本实用新型的技术方案。
20.本实用新型的一种可自动识别货号的物流机器人,如图1所示,包括物流机构1和扫描机构2,扫描机构2设置在物流机构1上并随着物流机构1一同移动。
21.本实施例中,物流机构1主要用于将货物运输至指定地点,扫描机构2主要用于扫描并识别货架上的货号,并将货号信息反馈,使得物流机构1能够将货物运输至指定地点。
22.如图2所示,物流机构1包括底座1-1、车架1-3和置物板1-5,底座1-1内部设置驱动电机并驱动底部的主动轮1-2转动,底座1-1的外侧焊接车架1-3,车架1-3底部四角位置设置滚轮1-4,车架1-3的顶部水平设置置物板1-5。
23.本实施例中,置物板1-5主要用于放置放置和运输货物,底座1-1内置驱动电机,驱动电机驱动主动轮1-2滚动,主动轮1-2驱动整个底座1-1移动,底座1-1带动车架1-3和置物板1-5移动运输货物,车架1-3和底部的滚轮1-4用于安装置物板1-5,并且保证置物板1-5的稳定性。
24.如图3所示,扫描机构2包括支架2-1、丝杆2-2和第一扫描镜头2-6,支架2-1一端固定连接在底座1-1上、另一端端部设置控制面板2-9,支架2-1底部的侧壁水平设置支撑座2-12,支撑座2-12上垂直设置丝杆2-2,丝杆2-2顶部穿过电机座2-3,电机座2-3上安装伺服电机2-4,伺服电机2-4的输出轴连接丝杆2-2的顶端,丝杆2-2上通过螺纹旋接滑座2-5,滑座2-5端部水平设置第一扫描镜头2-6。
25.本实施例中,第一扫描镜头2-6主要用于扫描货架上的货号,在扫描时,伺服电机2-4驱动丝杆2-2逆时针或顺时针转动,通过螺纹与丝杆2-2旋接的滑座2-5沿着丝杆2-2向上或向下移动调节位置,滑座2-5带动第一扫描镜头2-6上下移动调节位置,第一扫描镜头2-6对准货架上对应的货号编码扫描并识别,当识别到需要运输的货号时,物流机构1停止移动,并由该工位上的机械臂将货物搬运至指定货架上。
26.作为本实用新型的一种技术优化方案,置物板1-5水平设置在底座1-1的正上方,并且置物板1-5通过螺栓固定连接底座1-1的上端面。
27.通过采用上述技术方案,置物板1-5呈水平设置能够保证货物的稳定,并且置物板
1-5通过车架1-3和车架1-3底部的滚轮1-4支撑固定,能够保证整个物流机构1不仅能够运输更多的货物,而且能够保持平稳。
28.作为本实用新型的一种技术优化方案,支架2-1顶部侧壁水平连接连杆2-10,连杆2-10端部垂直设置第二扫描镜头2-11,第二扫描镜头2-11垂直向下正对置物板1-5的中心。
29.通过采用上述技术方案,从而可以利用第二扫描镜头2-11来扫描置物板1-5上货物的货号并记录,使得货物的货号与货架的货号能够对应,保证运输的精准性。
30.作为本实用新型的一种技术优化方案,支架2-1的侧壁上垂直设置导向架,导向架上由上之下开设剖面呈“t”形结构的导轨2-8,滑座2-5的侧壁上也凸设呈“t”形结构的滑块2-7,滑块2-7伸入到导轨2-8内并沿导轨2-8上下滑动。
31.通过采用上述技术方案,从而可以利用滑块2-7沿着导轨2-8滑动,使得整个滑座2-5能够在丝杆2-2的作用下,能够路沿着丝杆2-2垂直上下移动,保证滑座2-5上的第一扫描镜头2-6能够上下精准调节位置。
32.作为本实用新型的一种技术优化方案,控制面板2-9通过数据线连接小车、第一扫描镜头2-6和第二扫描镜头2-11。
33.通过采用上述技术方案,从而可以利用第一扫描镜头2-6来扫描货架的货号,利用第二扫描镜头2-11来扫描货物的货号,使得物流机器人能够将对应的货物送到指定的货架位置,方便该工位上的工业机器人将货物搬运至货架上。
34.上述具体实施方式仅仅对本实用新型的优选实施方式进行描述,而并非对本实用新型的保护范围进行限定。在不脱离本实用新型设计构思和精神范畴的前提下,本领域的普通技术人员根据本实用新型所提供的文字描述、附图对本实用新型的技术方案所作出的各种变形、替代和改进,均应属于本实用新型的保护范畴。本实用新型的保护范围由权利要求确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。