1.本发明涉及智慧医疗、人工智能、机器人学、仪器科学、控制科学、计算机科学、传感器技术、人机交互技术等交叉领域,涉及一种穿戴式医疗行为协同监测的心肺复苏辅助系统及方法。
背景技术:
2.心肺复苏(cardiopulmonary resuscitation,cpr)是对心脏骤停和呼吸暂停患者实行救治的一种医学技术,是一项最重要最基本的急救措施。通过对病人实施正确规范的心肺复苏,能够大大提高心脏骤停患者抢救的成功率。
3.临床心肺复苏需要医生对患者病情状况进行判断,依据医生的判断,进行胸外按压、人工通气、除颤和给药等一系列紧急复杂的操作。在这些操作循环执行的过程中,仍然需要医生就患者的反应做出正确及时的判断,并正确有效的做出进一步治疗。所述的患者反应包括在r轮按下通气心肺复苏后心率、脉搏、血氧及体温等生理信息(r=1,2,3
…
)。然而,在实际的紧急的临床心肺复苏抢救中,仍然存在一定的问题,表现为不能及时规范地进行多人协同心肺复苏作业。例如,按压手法和姿势不正确,抢救者不难保证按压力量垂直作用于胸骨及正确位置;按压频率及按压深度不正确,充分回弹不足;心肺复苏整体操作流程不够熟练,容易出现手无足措,步骤混乱的情形;在人工通气过程中,气道开放的不够标准,压额托颌不够到位,导致气道不流畅。在心肺复苏紧张的时间内,更加需要抢救者多人协作完成,如何对多人协作的救治过程进行有效监测和辅助提醒,将挽救患者生命的心肺复苏以标准规范的方式实施,是本领域内需要解决的技术问题。
4.已有研究者认识到心肺复苏中存在的问题,提出对心肺复苏辅助系统装置的设计。针对按压频率、深度等问题,专利cn 204655469提出一种心肺复苏辅助装置及其系统,在施救者的手臂上安装惯性测量单元,解算出施救者进行胸外按压时手臂的按压幅度和频率,并给予施救者提醒,以获得正确的按压频率和按压深度,但是该系统存在无法对进行胸外按压施救者的手臂姿态、按压力方向,以及施救者位姿进行判断,存在感知数据模态单一,施救者手臂运动误判断几率大,运行可靠性不高等问题。此外,现有的心肺复苏辅助系统主要针对胸外按压动作的矫正,缺乏对多人协作心肺复苏的全局监测,无法完成具有严格时序和人员空间动态变化的紧急复杂操作的有效辅助。
5.鉴于以上,本专利提出一种穿戴式医疗行为协同监测的心肺复苏辅助系统及方法,能够通过对所有参与心肺复苏的多个医务人员进行实时的位置、动作和语音信息采集,并通过对采集的时空数据进行融合,使得系统可以监测参与心肺复苏的多个医务人员的医疗行为,构建心肺复苏医疗行为中的人机交互,实现心肺复苏过程中的实时全流程辅助,降低错误发生的概率,提高心肺复苏的效率和效果。
技术实现要素:
6.本发明面向的对象是参与心肺复苏多人协同场景中的多位施救者和患者,为解决
多人协作的心肺复苏缺乏全局监测、按压或通气等行为缺乏反馈矫正、紧急复杂且多人员动态变化的心肺复苏场景中缺乏有效辅助的问题,对多位施救者位置、肢体行为动作和语音信息进行监测,并基于监测的多模态数据对全流程心肺复苏的进展进行辅助。
7.为实现上述目的,本发明采取的技术方案是:
8.一种穿戴式医疗行为协同监测的心肺复苏辅助系统,所述的穿戴式医疗行为协同监测的心肺复苏辅助系统包括穿戴式节点、定位锚点和控制中心三个部分;
9.所述的穿戴式节点包括安装在医务人员左、右手臂的大臂和小臂上,以及患者胸部和腿部上的对应节点;
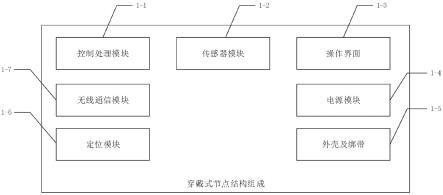
10.所述的穿戴式节点由控制处理模块、传感器模块、操作界面、电源模块、外壳及绑带、定位模块和无线通信模块组成:
11.所述的控制处理模块采用低功耗嵌入式微处理器,负责整个节点的逻辑控制、数据运算,并与无线通信模块、定位模块通信;
12.所述的传感器模块是由加速度计、陀螺仪、磁力计构成的惯性测量单元,能够测量节点所在的九轴惯性数据,包括线性加速度、角速度、磁场和姿态四元数;
13.所述的操作界面由按键和屏幕组成,用于输入节点的必要信息;
14.所述的电源模块由微型锂电池、电源变换模块和充电模块组成,负责整个节点系统的供电;
15.所述的外壳及绑带负责节点硬件的安装和固定在医生/患者的肢体上,外壳由模具注塑或3d打印加工,绑带将穿戴式节点固定在肢体目标位置;
16.所述的定位模块配合位置已知的分布在心肺复苏作业四周的定位锚点,构成无线定位网络系统,定位模块确定与各个锚点的相对距离,利用三角法定位算法,求解出定位模块的坐标;
17.所述的无线通信模块与无线通信协调器构成无线传感网络,用于传输节点的传感器数据和位置数据;
18.所述的定位锚点有四个分别定位锚点一、定位锚点二、定位锚点三和定位锚点四,通过三角支架固定在心肺复苏作业场地四周,所述的定位锚点坐标位置均为已知;
19.所述的控制中心包括语音交互单元、控制处理单元和无线通信单元,所述语音交互单元由环型麦克风和扬声器构成,实现对医生语音信息的采集和双向语音交互,所述控制处理单元为可运行本系统的便携式计算机或工控机且有视觉交互界面,完成对穿戴式节点信息的感知和行为识别与推理;所述视觉交互界面用于显示控制处理单元需要展示的数据信息及图像界面;所述无线通信单元作为穿戴式节点网络中心,与各个节点进行通信,实现双向信息交互和控制。
20.作为本发明系统进一步改进,所述的操作界面输入节点的必要信息包括节点所在肢体位置和医生的身份信息。
21.作为本发明系统进一步改进,所述的穿戴式节点整体结构由绑带,外壳下壳,外壳上壳、薄膜锂电池和集成芯片电路板组成,所述的绑带为弹性绳,所述的绑带穿过外壳上盖的绑带固定槽,将节点穿戴在医生/患者肢体上;所述的外壳下壳与外壳上壳由模具或3d打印工艺加工,所述外壳下壳和外壳上壳由螺栓连接,所述薄膜锂电池循环充放电,通过电源端子连接到集成芯片电路板上,所述的集成芯片电路板和薄膜锂电池固定在外壳内。
22.作为本发明系统进一步改进,所述的是穿戴式节点内部集成芯片电路板的结构包括传感器模块、控制处理模块、无线通信模块、定位模块和电源模块,所述传感器模块焊接在集成芯片电路板的背面,集成电路的正面由控制处理模块、无线通信模块、定位模块、电源模块构成。
23.作为本发明系统进一步改进,所述定位锚点由吸盘盒、定位单元和电池组成,所述的定位单元和电池均安装在吸盘盒里面。
24.作为本发明系统进一步改进,所述穿戴式节包括医护穿戴式节点和患者穿戴式节点,所述医护穿戴式节点有4个,分别为医护穿戴式节点一、医护穿戴式节点二、医护穿戴式节点三和医护穿戴式节点四被穿戴在医生的手臂上,在心肺复苏作业的过程中,实时的测量对应手臂惯性数据姿态数据,通过无线通信网络传输给无线通信单元,所述患者穿戴式节点有3个分别为患者额头穿戴式节点、患者胸廓穿戴式节点和患者腿部穿戴式节点,所述的患者额头穿戴式节点固定在患者额头,患者在通气阶段压额抬颌的标准程度直接决定了通气的效果,固定在患者额头穿戴式节点能够测量患者头部的实时姿态,用于对通气作业的评估。
25.本发明提供穿戴式医疗行为协同监测的心肺复苏辅助系统的使用方式,具体步骤如下:
26.获得患者胸廓在按压下产生的按压深度及按压频率,施救者手臂的垂直角度、作用力方向相关信息;按照以下算法进行求解:
27.s1:当医生对患者做胸外按压时,佩戴于医生手臂的传感器节点输出的加速度数据呈现周期性变化,在忽略传感器噪声和零偏情况下,加速度计的输出模型为:
28.a=-ak gk29.其中,ak=[a
x
,ay,az]为载体加速度实际测量值,gk=[0,0,gz]为传感器坐标系下重力加速测量值;
[0030]
s2:在[tk,t
k 1
]时间段,对ak作一次积分,得到速度信息:
[0031][0032]
其中v(t
k 1
)是t
k 1
时刻的速度,
[0033]
s3:再对速度进行积分,得到[tk,t
k 1
]时段内的位移:
[0034][0035]
从而求解到相邻连续时刻内的速度v
δt
和位移x
δt
;
[0036]
s4:当按压深度及回弹深度达到最大值时,体现特征为v
δt
与ak取得最小值,ak在z轴上分量数值符号发生变化;按压阶段和回弹阶段,ak的导数符号发生变化;
[0037]
s5:根据所述特征,可以获得按压阶段时间持续t
p
和回弹阶段的持续时间tr,对位移x
δt
在t
p
和tr内作累加,即从医生手臂穿戴式节点侧,求解到按压深度、回弹深度和按压速度;
[0038]
s6:对患者胸骨上的传感器作如上算法解算,获得从另一维度的按压深度、回弹深度和按压频率等信息,将来自患者胸骨上的传感器数据解算结果将作为心肺复苏行为感知的先验,当进行心肺按压作业的医生做出与胸外按压无关的肢体动作时,系统能够对扰动作出抑制,降低误判的可能;
[0039]
s7:当心肺复苏医生未垂直手臂按压时,存在两种可能情况:(1)手肘关节弯曲(2)手肘关节未弯曲,手臂垂直倾斜角过大;
[0040]
s8:针对情况(1),此时手肘关节将发生角位移,通过对上臂与下臂节点惯性测量单元的姿态变换对该角位移进行观测;针对情况(2),在心肺复苏按压过程中,上臂和下臂的垂直倾斜角在阈值范围内是合理的,对垂直倾斜角进行阈值控制,保证按压力的方向的垂直;
[0041]
心肺复苏作业现场的所有穿戴式节点都会作为无线传感网络中的节点,并且每个穿戴式节点都有唯一的mac地址,以心肺复苏医生角色d1为例,角色确认方法如下:
[0042]
s1:在医生d1开始心肺复苏作业时,启动安装在其左、右手臂上的穿戴式节点,并通过按键/触摸屏选择自己的角色;
[0043]
s2:穿戴式节点将其自身的mac地址和医生d1确定的身份id进行数据绑定,并无线发送给控制中心;
[0044]
s3:控制中心将接收所有穿戴式节点上传的数据包,并从上传的数据中查找到与步骤s2中mac地址匹配的节点数据包,更新到医生d1的数据库中,完成穿戴式节点与医生d1的关联;
[0045]
重复上述步骤,实现参与心肺复苏作业的其他施救者的角色分配;
[0046]
当第j个穿戴式节点,j=1,2,3
…
m,m表示的是穿戴式节点数目,收到所有定位锚点发来的无线数据后,通过信号强度测算出距离d
ji
,i=1,2,3
…
n,n表示定位锚点的数目,n》=4,并基于以下算法进行定位:
[0047]
n个定位锚点布置在心肺复苏作业四周,定位过程中依次轮询选择其中的三个定位锚点am的坐标为(xm,ym),m=1,2,3,由于信号传播速度已知,根据信号传播时间,计算三个锚点到穿戴式节点j的距离分别为d
j1
,d
j2
,d
j3
,设穿戴式节点j的坐标为(x,y),则有以下方程组:
[0048][0049]
解方程组得到穿戴式节点的坐标:
[0050][0051]
轮询式从n个锚点中选出三个锚点,得到上面的方程组,并求解得到一组穿戴式节点j的坐标,共可得到c(n,3)组穿戴式节点j的坐标,以该c(n,3)组穿戴式节点j的坐标的平均值作为穿戴式节点j的最终坐标;
[0052]
对其他参与心肺复苏作业的医生双臂上的节点和患者身上的节点按照如上算法求解节点的坐标,即可求解参与心肺复苏医生和患者在作业空间中的实时位置;
[0053]
在所述的控制中心的控制处理单元中,需要基于控制中心的无线通信单元收到的传感器数据,进行医生/患者行为的感知,进而实现对心肺复苏作业的推理,控制中心将控制处理单元计算处理的结果可视化到视觉交互界面上,控制处理单元基于节点姿态四元数求解医生一节手臂的姿态的算法过程,该姿态更新算法的求解步骤如下:
[0054]
设心肺复苏作业过程中,就医生的右下臂姿态更新四元数分析:
[0055]
s1:在可视化交互界面上设计有参与心肺复苏作业医生的数字孪生人物模型,在心肺复苏作业开始前,数字孪生任务模型处于初始姿态呈现a字型展臂,获取在unity3d世界坐标系下的医生人物模型的质心姿态四元数q
body
和医生右下手臂的姿态四元数q
init
;
[0056]
s2:求解q
body
到q
init
的姿态变换四元数q
body_to_init
(world)得:
[0057][0058]
其中q
body
.inverse()表示四元数q
body
的逆四元数,下同;
[0059]
s3:判断医生右下手臂穿戴的传感器是否更新惯性测量单元的数据,若未更新,则等待惯性测量单元更新;
[0060]
s4:获取到无线通信单元更新的右下手臂惯性测量单元姿态四元数q
lastest
和姿态更新初始时刻的惯性测量单元姿态四元数q
base
,其中,q
lastest
每次循环都将被更新,q
base
仅在首次循环中更新;
[0061]
s5:求解世界坐标系下,q
lastest
到q
base
的姿态变换四元数:
[0062][0063]
s6:q
lastest_to_base
(world)描述的是一个姿态更新周期内,对应惯性测量单元姿态变化量的四元数,在q
lastest_to_base
(world)的姿态基上叠加是新姿态四元数q
body
,以获得以质心为姿态基的惯性测量单元姿态变化量:
[0064][0065]
s7:在q
lastest_to_base
(body)姿态基上叠加从质心到手臂姿态变换四元数
[0066]qbody_to_init
(world)得到右下手臂在世界坐标系下的更新后的姿态四元数:
[0067][0068]
s8:右下手臂姿态更新四元数求解完成,将该四元数作为目标值设置到医生数字孪生人物模型右下手臂作为目标姿态即可;
[0069]
重复上述求解步骤,将医生右下手臂所在节点替换为其他位置的所在节点的姿态四元数,即可求解其他节点所在肢体的目标姿态,重复以上算法,即可求解出医生在心肺复苏作业中,双臂连续作业的行为动作;
[0070]
语音交互模块实时的监听参与心肺复苏作业医生的语音信息,对关键语音信息进行信息提取,从而感知到整个心肺复苏的流程进展,当医生对某个步骤出现不清晰、不规范、遗漏相关情况时,语音交互系统能够实现及时的提示,指导医生参与心肺复苏作业,所述的语音交互模块按照以下步骤实现:
[0071]
s1:医生就病人情况进行判断,通过语音信息说出病人当前的情况;
[0072]
s2:语音交互模块的拾取医生的语音信号,对语音进行滤波、采样等语音信号的数字处理工作;
[0073]
s3:通过自动语音识别模块,完成对语音信号的识别,获得医生语音信息对应的文字内容。
[0074]
s4:系统通过前面s1-s3步骤,获取到病人描述信息“没有呼吸没有脉搏”;
[0075]
s5:通过前面步骤s1-s4,系统得到医生语音信息的文字化内容,需要对文字化内
容进行语义理解,将自然语言转化成本系统数据库中收录的可以被系统理解的语义信息;
[0076]
s6:获得所述的语义信息;
[0077]
s7:对话管理单元根据s6中的语义信息进行对话逻辑分析,与心肺复苏管理和推理单元s14进行信息交互,根据数据库中的心肺复苏流程标准等先验知识,完成对当前对话的推理,生成信息响应;同时,对话管理单元与对话历史单元s13,记录心肺复苏历史步骤,实现基于对话历史的心肺复苏流程记录;
[0078]
s8-s9:根据对话管理s7的输出,生成语义信息,自然语言响应s9能够理解语义信息,根据语义信息生成自然语言文本s10;
[0079]
s11-s12:语音合成实现将文本文字转化成语音,通过扬声器硬件播放给医生;
[0080]
对心肺复苏作业全流程行为进行建模,设计有限状态机描述心肺复苏作业标准流程的状态与步骤,以及响应来自医生的语音信息和系统监测到步骤缺漏与不规范的事件,前述的感知到的多位施救者行为数据、患者状态数据、从语音对话提取的心肺复苏作业过程数据将用于驱动该状态机进行状态切换、调度和流程记录,所述的有限状态机按照如下步骤进行调度和推理:
[0081]
s1:语音交互模块采集到医生的语音“患者没有反应了”;
[0082]
s2:等待监听是否有医生语音“没有呼吸没有脉搏”;
[0083]
s3:设定时间内未监听到医生就病人呼吸脉搏的状况的描述,触发系统语音提示“请判断患者脉搏情况”;
[0084]
s4:识别到s2中所述的医生语音,系统状态转换为紧急响应,启动心肺复苏作业协助系统,触发语音提示“呼叫救援取得除颤仪,并立即开始胸外按压”;
[0085]
s5:融合本发明中的穿戴式节点和控制处理中心,对胸外按压的作业规范进行实时的监测,主要监测指标为按压深度、按压频率和按压力的方向。当所述指标不达标时,触发相应的语音提示;
[0086]
s6:根据2015aha心肺复苏指南建议,本发明采用30:2(30次按压通气2次)的心肺复苏作业模式,在心肺复苏紧急的作业过程中,医生容易对按压次数计数失误,鉴于此,系统将融合穿戴式节点中的传感器,按压次数的指标与加速度呈直接相关,特别是加速度方向,当系统计数按压次数到达预设30次时,暂停对按压作业监测;
[0087]
s7:s6中所述的按压作业达到预设,触发系统进行语音提示“开始打开患者气道并给予两次人工通气”;
[0088]
s8:融合穿戴式节点和控制处理中心,对通气作业医生作业双臂行为进行监测,对患者额头的姿态进行监测,以获取适合的气道开度,对通气医生语音“通气完成”进行监测;
[0089]
s9:系统在预设的通气时间结束后,若未识别到“通气完成”语音信息,将提示医生“请说出通气是否完成”;
[0090]
s10:系统在协助同时,不断记录心肺复苏正在进行和已经完成的操作步骤,当胸外按压、通气、除颤作业达到一定次数后,患者仍然无法恢复自主循环,系统将给予参与多人协同心肺复苏作业的所有医生提示,并记录心肺复苏作业数据,退出系统;
[0091]
s11:与s6—s9并行执行的系统任务式对语音指令“除颤仪到”进行监测,在按压作业的过程中,识别到所述指令后,系统将提示“停止按压,开始示波”的语音指令;
[0092]
s12:医生基于波形进行判断,当出现室颤时,医生说出“室颤”,向系统报告,系统
将立即提醒“立即除颤,能量360j,开始充电”;
[0093]
s13:当系统收到医生语音信息“充电完成”,将触发语音提示“请大家患者,并给予除颤”;
[0094]
s14:系统识别医生语音信息“除颤完毕”,将提示医生“立即恢复按压”;
[0095]
s15:与步骤s6—s9及步骤s11—s14并行执行,当系统接收到医生语音信息“患者恢复自主循环时”,退出心肺复苏紧急状态,退出系统协助。
[0096]
采用本发明的技术方案将有以下有益效果:
[0097]
(1)本发明面向医院心肺复苏医疗行为过程中存在的问题,提出一套综合的解决方法,能够对施救过程中,担任不同角色的施救者的医疗行为进行监督和指导,提高多人协同心肺复苏操作的准确度和效率。
[0098]
(2)本发明的系统融合来自患者、施救者的多维度传感器数据,实时分析推理多人协同施救的心肺复苏作业是否符合规范,流程是否标准,当存在错误或者遗漏时能够进行主动语音辅助和交互界面指引。
[0099]
(3)穿戴式节点的硬件资源简单小巧,不会对施救者的施救行为造成运动干扰,能够有效的测量出施救者/患者的位置和肢体动作姿态。并且穿戴式节点能够避免视觉方案场景固定、存在遮挡、对于光源要求高等问题。
[0100]
(4)本发明亦能够进行事后行为数据的分析,可以识别判断医疗行为中的不足,扩展医疗行为的效果评估反馈的信息维度。
附图说明
[0101]
图1为本发明的穿戴式节点组成示意图;
[0102]
图2为本发明的穿戴式节点结构组成示意图1;
[0103]
图3为本发明的穿戴式节点结构组成示意图2;
[0104]
图4为本发明的医疗行为姿态计算方法示意图;
[0105]
图5为本发明的医疗行为语音辅助系统示意图;
[0106]
图6为本发明的穿戴式心肺复苏辅助系统部署示意图(整体);
[0107]
图7为本发明的穿戴式心肺复苏辅助系统部署示意图(患者局部);
[0108]
图8为本发明的穿戴式医疗行为协同监测的心肺复苏辅助系统使用流程图。
[0109]
附件标记:
[0110]
1-1、控制处理模块;1-2、传感器模块;1-3、操作界面;1-4、电源模块;1-5、外壳及绑带;1-6、定位模块;1-7、无线通信模块;2-1、绑带;2-2-1、外壳下壳;2-2-2,外壳上壳;2-3、薄膜锂电池;2-4、集成芯片电路板;3-1、传感器模块;3-2、电源模块;3-3、集成电路的正面;4-1、语音交互单元;5-1-1、定位锚点一;5-1-2、定位锚点二;5-1-3、定位锚点三;5-1-4、定位锚点四;5-2、控制处理单元;5-3、无线通信单元;5-4-1、医护穿戴式节点一;5-4-2、医护穿戴式节点二;5-4-3、医护穿戴式节点三;5-4-4、医护穿戴式节点四;6-1、患者额头穿戴式节点;6-2、患者胸廓穿戴式节点;6-3、患者腿部穿戴式节点。
具体实施方式
[0111]
下面结合附图与具体实施方式对本发明作进一步详细描述:
[0112]
为使本发明目的、技术方案、优点更加清楚明白,下面结合实施例和附图,对本发明作进一步详细说明。
[0113]
参照图1,穿戴式节点的结构组成示意图,穿戴式节点由控制处理模块1-1、传感器模块1-2、操作界面1-3、电源模块1-4、外壳及绑带1-5、定位模块1-6、无线通信模块1-7组成。控制处理模块采用低功耗嵌入式微处理器,负责整个节点的逻辑控制、数据运算,并与无线通信模块、定位模块通信。
[0114]
传感器模块是由加速度计、陀螺仪、磁力计构成的惯性测量单元,能够测量节点所在的三轴惯性数据,包括线性加速度、角速度、磁场和姿态四元数。通过对这些数据的融合解算,可以获得患者胸廓在按压下产生的按压深度及按压频率,施救者手臂的垂直角度、作用力方向等信息;按照以下算法进行求解:
[0115]
s1:当医生对患者做胸外按压时,佩戴于医生手臂的传感器节点输出的加速度数据呈现周期性变化,在忽略传感器噪声和零偏情况下,加速度计的输出模型为:
[0116]
a=-ak gk[0117]
其中,ak=[a
x
,ay,az]为载体加速度实际测量值,gk=[0,0,gz]为传感器坐标系下重力加速测量值。
[0118]
s2:在[tk,t
k 1
]时间段,对ak作一次积分,得到速度信息:
[0119][0120]
其中v(t
k 1
)是t
k 1
时刻的速度,
[0121]
s3:再对速度进行积分,得到[tk,t
k 1
]时段内的位移:
[0122][0123]
从而求解到相邻连续时刻内的速度v
δt
和位移x
δt
;
[0124]
s4:当按压深度及回弹深度达到最大值时,体现特征为v
δt
与ak取得最小值,ak在z轴上分量数值符号发生变化;按压阶段和回弹阶段,ak的导数符号发生变化。
[0125]
s5:根据所述特征,可以获得按压阶段时间持续t
p
和回弹阶段的持续时间tr,对位移x
δt
在t
p
和tr内作累加,即从医生手臂穿戴式节点侧,求解到按压深度、回弹深度和按压速度。
[0126]
s6:对患者胸骨上的传感器作如上算法解算,获得从另一维度的按压深度、回弹深度和按压频率等信息,将来自患者胸骨上的传感器数据解算结果将作为心肺复苏行为感知的先验,当进行心肺按压作业的医生做出与胸外按压无关的肢体动作时,系统能够对扰动作出抑制,降低误判的可能。
[0127]
s7:当心肺复苏医生未垂直手臂按压时,存在两种可能情况:(1)手肘关节弯曲(2)手肘关节未弯曲,手臂垂直倾斜角过大。
[0128]
s8:针对情况(1),此时手肘关节将发生角位移,通过对上臂与下臂节点惯性测量单元的姿态变换对该角位移进行观测;针对情况(2),在心肺复苏按压过程中,上臂和下臂的垂直倾斜角在阈值范围内是合理的,对垂直倾斜角进行阈值控制,保证按压力的方向的垂直。
[0129]
操作界面由按键和屏幕组成,可以用于输入节点的必要信息,如节点所在肢体位置、医生的身份角色信息等,所述的身份角色包括但不限于心肺按压医生、通气医生、给药
医生、电击除颤医生和护士。
[0130]
为了实现对施救者不同角色的定向分析和协同指导,系统需要对参与心肺复苏医生进行角色分配。心肺复苏作业现场的所有穿戴式节点都会作为无线传感网络中的节点,并且每个穿戴式节点都有唯一的mac地址。以心肺复苏医生角色d1为例,本发明的角色确认方法如下:
[0131]
s1:在医生d1开始心肺复苏作业时,启动安装在其左、右手臂上的穿戴式节点,并通过按键/触摸屏选择自己的角色;
[0132]
s2:穿戴式节点将其自身的mac地址和医生d1确定的身份id进行数据绑定,并无线发送给控制中心;
[0133]
s3:控制中心将接收所有穿戴式节点上传的数据包,并从上传的数据中查找到与步骤s2中mac地址匹配的节点数据包,更新到医生d1的数据库中,完成穿戴式节点与医生d1的关联。
[0134]
重复上述步骤,实现参与心肺复苏作业的其他施救者的角色分配。
[0135]
电源模块由微型锂电池、电源变换模块和充电模块组成,负责整个节点系统的供电。外壳和绑带负责节点硬件的安装和固定在医生/患者的肢体上,外壳由模具注塑或3d打印加工,绑带可以便捷地将穿戴式节点固定在肢体目标位置。无线通信模块与无线通信协调器构成无线传感网络,用于传输节点的传感器数据和位置数据。
[0136]
定位模块配合位置已知的分布在心肺复苏作业四周的定位锚点,构成无线定位网络系统,所述的定位锚点包括多个,可以通过三脚架布置在医务人员心肺复苏作业的四周,能够和定位模块进行通信,当第j个穿戴式节点(j=1,2,3
…
m,m表示的是穿戴式节点数目)收到所有定位锚点发来的无线数据后,通过信号强度测算出距离d
ji
(i=1,2,3
…
n,n表示定位锚点的数目,n》=4),并基于以下算法进行定位:
[0137]
n个定位锚点布置在心肺复苏作业四周,定位过程中依次轮询选择其中的三个定位锚点am的坐标为(xm,ym),(m=1,2,3)。由于信号传播速度已知,根据信号传播时间,计算三个锚点到穿戴式节点j的距离分别为d
j1
,d
j2
,d
j3
,设穿戴式节点j的坐标为(x,y),则有以下方程组:
[0138][0139]
解方程组得到穿戴式节点的坐标:
[0140][0141]
理论上,只需要三个锚点即可完成对穿戴式节点j的定位,在本系统中,为了进一步提高精度,轮询式从n个锚点中选出三个锚点,得到上面的方程组,并求解得到一组穿戴式节点j的坐标,共可得到c(n,3)组穿戴式节点j的坐标,以该c(n,3)组穿戴式节点j的坐标的平均值作为穿戴式节点j的最终坐标。
[0142]
对其他参与心肺复苏作业的医生双臂上的节点和患者身上的节点按照如上算法求解节点的坐标,即可求解参与心肺复苏医生和患者在作业空间中的实时位置。
[0143]
参照图2和图3,所述的穿戴式节点整体结构由绑带2-1,外壳下壳2-2-1,外壳上壳2-2-2、薄膜锂电池2-3、集成芯片电路板2-4组成。所述的绑带2-1具有弹性,其穿过外壳上盖2-2-1的绑带固定槽,从而将节点穿戴在医生/患者肢体上;所述的外壳下壳2-2-1与外壳上壳2-2-2由模具或3d打印工艺加工,上壳下壳由螺栓连接。所述薄膜锂电池2-3体积微小,可以循环充放电,其通过电源端子连接到集成芯片电路板2-4上。所述的集成芯片电路板2-4和薄膜锂电池2-3固定在外壳内。图3所述的是穿戴式节点内部集成芯片电路板的结构,传感器模块3-1焊接在集成芯片电路板的背面,集成电路的正面3-3由控制处理模块、无线通信模块、定位模块、电源模块3-2构成。
[0144]
参照图4,在所述的控制中心的控制处理单元中,需要基于控制中心的无线通信单元收到的传感器数据,进行医生/患者行为的感知,进而实现对心肺复苏作业的推理。在前述的基础上,控制中心将控制处理单元计算处理的结果可视化到视觉交互界面上。图4描述的是控制处理单元基于节点姿态四元数求解医生一节手臂的姿态的算法过程。该姿态更新算法的求解步骤如下:
[0145]
设心肺复苏作业过程中,就医生的右下臂姿态更新四元数分析:
[0146]
s1:在可视化交互界面上设计有参与心肺复苏作业医生的数字孪生人物模型,在心肺复苏作业开始前,数字孪生任务模型处于初始姿态呈现a字型展臂,获取在unity3d世界坐标系下的医生人物模型的质心姿态四元数q
body
和医生右下手臂的姿态四元数q
init
;
[0147]
s2:求解q
body
到q
init
的姿态变换四元数q
body_to_init
(world)得:
[0148][0149]
其中q
body
.inverse()表示四元数q
body
的逆四元数,下同;
[0150]
s3:判断医生右下手臂穿戴的传感器是否更新惯性测量单元的数据,若未更新,则等待惯性测量单元更新;
[0151]
s4:获取到无线通信单元更新的右下手臂惯性测量单元姿态四元数q
lastest
和姿态更新初始时刻的惯性测量单元姿态四元数q
base
,其中,q
lastest
每次循环都将被更新,q
base
仅在首次循环中更新;
[0152]
s5:求解世界坐标系下,q
lastest
到q
base
的姿态变换四元数:
[0153][0154]
s6:q
lastest_to_base
(world)描述的是一个姿态更新周期内,对应惯性测量单元姿态变化量的四元数,在q
lastest_to_base
(world)的姿态基上叠加是新姿态四元数q
body
,以获得以质心为姿态基的惯性测量单元姿态变化量:
[0155][0156]
s7:在q
lastest_to_base
(body)姿态基上叠加从质心到手臂姿态变换四元数q
body_to_init
(world)得到右下手臂在世界坐标系下的更新后的姿态四元数:
[0157][0158]
s8:右下手臂姿态更新四元数求解完成,将该四元数作为目标值设置到医生数字孪生人物模型右下手臂作为目标姿态即可。
[0159]
重复上述求解步骤,将医生右下手臂所在节点替换为其他位置的所在节点的姿态四元数,即可求解其他节点所在肢体的目标姿态,重复以上算法,即可求解出医生在心肺复
苏作业中,双臂连续作业的行为动作。
[0160]
参照图5,为在所述的控制中心的控制处理单元中的语音交互模块结构示意图,语音交互模块实时的监听参与心肺复苏作业医生的语音信息,对关键语音信息进行信息提取,从而感知到整个心肺复苏的流程进展,当医生对某个步骤不清晰、不规范、遗漏等情况时,语音交互系统能够实现及时的提示,指导医生参与心肺复苏作业。基于以上,本发明设计了一套完整的心肺复苏辅助系统的语音交互模块,所述的语音交互模块按照以下步骤实现:
[0161]
s1:医生就病人情况进行判断,通过语音信息说出病人当前的情况;
[0162]
s2:语音交互模块的拾取医生的语音信号,对语音进行滤波、采样等语音信号的数字处理工作;
[0163]
s3:通过自动语音识别模块,完成对语音信号的识别,获得医生语音信息对应的文字内容。
[0164]
s4:系统通过前面s1-s3步骤,获取到病人描述信息“没有呼吸没有脉搏”;
[0165]
s5:通过前面步骤s1-s4,系统得到医生语音信息的文字化内容,需要对文字化内容进行语义理解,将自然语言转化成本系统数据库中收录的可以被系统理解的语义信息;
[0166]
s6:获得所述的语义信息;
[0167]
s7:对话管理单元根据s6中的语义信息进行对话逻辑分析,与心肺复苏管理和推理单元s14进行信息交互,根据数据库中的心肺复苏流程标准等先验知识,完成对当前对话的推理,生成信息响应;同时,对话管理单元与对话历史单元s13,记录心肺复苏历史步骤,实现基于对话历史的心肺复苏流程记录;
[0168]
s8-s9:根据对话管理s7的输出,生成语义信息,自然语言响应s9能够理解语义信息,根据语义信息生成自然语言文本s10;
[0169]
s11-s12:语音合成实现将文本文字转化成语音,通过扬声器硬件播放给医生。
[0170]
除了上述对话式语音交互外,当控制中心检测到医生的手臂姿态、按压频率和按压深度不正确,通气作业不规范无法达到较好的通气效果和其他异常非标准的心肺复苏作业时,语音交互模块会主动给予医生语音提示。
[0171]
参照图6和图7,图6描述了本发明系统部署示意图,定位锚点有四个分别定位锚点一5-1-1、定位锚点二5-1-2、定位锚点三5-1-3和定位锚点四5-1-4,通过三角支架固定在心肺复苏作业场地四周,所述的定位锚点坐标位置均为已知;控制中心主要设备为语音交互单元6-1、控制处理单元6-2和无线通信单元6-3;穿戴式节点有4个,分别为医护穿戴式节点一5-4-1、医护穿戴式节点二5-4-2、医护穿戴式节点三5-4-3和医护穿戴式节点四5-4-4被穿戴在医生的手臂上,在心肺复苏作业的过程中,实时的测量对应手臂惯性数据姿态数据,通过无线通信网络传输给无线通信单元5-3;图7描述的被施加心肺复苏作业的患者特征,患者额头、胸廓及腿部固定穿戴式节点分别为患者额头穿戴式节点6-1、患者胸廓穿戴式节点6-2和患者腿部穿戴式节点6-3,所述的患者额头穿戴式节点6-1固定在患者额头,患者在通气阶段压额抬颌的标准程度直接决定了通气的效果,固定在患者额头穿戴式节点6-1能够测量患者头部的实时姿态,用于对通气作业的评估。
[0172]
参照图8,所述为本发明辅助系统在参与心肺复苏作业过程中的使用流程示意图,本发明构建的系统是面向心肺复苏医疗行为中对多位参与者的协同监测及辅助,系统能够
参与到心肺复苏作业的全流程中,而非仅仅是对胸外按压或通气等单一任务进行监测和辅助。在前述的实施例中,对参与心肺复苏作业多位施救者的角色进行了分配和确定,计算患者和多位施救者的坐标位置、肢体行为动作、感知语音表达的意图等技术要点是为了实现对心肺复苏不同角色参与者的多模态协同监测;
[0173]
本发明对心肺复苏作业全流程行为进行建模,设计有限状态机描述心肺复苏作业标准流程的状态与步骤,以及响应来自医生的语音信息和系统监测到步骤缺漏与不规范的事件,前述的感知到的多位施救者行为数据、患者状态数据、从语音对话提取的心肺复苏作业过程数据将用于驱动该状态机进行状态切换、调度和流程记录,所述的有限状态机按照如下步骤进行调度和推理:
[0174]
s1:语音交互模块采集到医生的语音“患者没有反应了”;
[0175]
s2:等待监听是否有医生语音“没有呼吸没有脉搏”;
[0176]
s3:设定时间内未监听到医生就病人呼吸脉搏的状况的描述,触发系统语音提示“请判断患者脉搏情况”;
[0177]
s4:识别到s2中所述的医生语音,系统状态转换为紧急响应,启动心肺复苏作业协助系统,触发语音提示“呼叫救援取得除颤仪,并立即开始胸外按压”;
[0178]
s5:融合本发明中的穿戴式节点和控制处理中心,对胸外按压的作业规范进行实时的监测,主要监测指标为按压深度、按压频率和按压力的方向。当所述指标不达标时,触发相应的语音提示;
[0179]
s6:根据2015aha心肺复苏指南建议,本发明采用30:2(30次按压通气2次)的心肺复苏作业模式,在心肺复苏紧急的作业过程中,医生容易对按压次数计数失误,鉴于此,系统将融合穿戴式节点中的传感器,按压次数的指标与加速度呈直接相关,特别是加速度方向,当系统计数按压次数到达预设30次时,暂停对按压作业监测;
[0180]
s7:s6中所述的按压作业达到预设,触发系统进行语音提示“开始打开患者气道并给予两次人工通气”;
[0181]
s8:融合穿戴式节点和控制处理中心,对通气作业医生作业双臂行为进行监测,对患者额头的姿态进行监测,以获取适合的气道开度,对通气医生语音“通气完成”进行监测;
[0182]
s9:系统在预设的通气时间结束后,若未识别到“通气完成”语音信息,将提示医生“请说出通气是否完成”;
[0183]
s10:系统在协助同时,不断记录心肺复苏正在进行和已经完成的操作步骤,当胸外按压、通气、除颤作业达到一定次数后,患者仍然无法恢复自主循环,系统将给予参与多人协同心肺复苏作业的所有医生提示,并记录心肺复苏作业数据,退出系统;
[0184]
s11:与s6—s9并行执行的系统任务式对语音指令“除颤仪到”进行监测,在按压作业的过程中,识别到所述指令后,系统将提示“停止按压,开始示波”的语音指令;
[0185]
s12:医生基于波形进行判断,当出现室颤时,医生说出“室颤”,向系统报告,系统将立即提醒“立即除颤,能量360j,开始充电”;
[0186]
s13:当系统收到医生语音信息“充电完成”,将触发语音提示“请大家患者,并给予除颤”;
[0187]
s14:系统识别医生语音信息“除颤完毕”,将提示医生“立即恢复按压”;
[0188]
s15:与步骤s6—s9及步骤s11—s14并行执行,当系统接收到医生语音信息“患者
恢复自主循环时”,退出心肺复苏紧急状态,退出系统协助。
[0189]
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。