1.本发明涉及无人车技术领域,具体涉及一种无人车能量管理控制方法及系统。
背景技术:
2.近年来,随着无人车在园区安保、快递物流、治安巡逻、设备巡检和园区清洁等众多领域的广泛应用,无人车上所携带的设备数量也逐渐增多。在无人车供电系统中,如果某个或某几个设备出现用电异常,可能导致供电网络内的其他设备无法正常工作。随着设备用电量增大,无人车需要根据业务需求,主动关闭某些非必需设备,以降低整车功耗。传统分布式能量管理方式,需要在所有设备内部实现,且通过接口控制设备的运行模式,增加了工程实现和系统集成的复杂度。集中式能量管理方式能够降低设备和系统的耦合程度,简化工程实现和系统集成的复杂度。因此,目前亟需一种无人车能量管理方法,能够采用集中式管理的方式,对无人车进行高效管理,降低系统复杂度。
技术实现要素:
3.有鉴于此,本发明提供了一种无人车能量管理控制方法及系统,能够采用集中式管理的方式,提高设备和系统的耦合程度,简化工程实现,降低系统复杂度。
4.为实现上述目的,本发明的技术方案为:
5.一种无人车能量管理控制方法,无人车设置总控制器连接所有供电控制器,无人车的各类设备分别位于各个分支的电路上,每个分支上设置供电控制器和继电器,控制该分支的供电状态,具体步骤包括:
6.供电控制器采集所有的分支功率,将分支功率返回到总控制器;总控制器收到功率数据,对分支上的供电控制器发出指令。
7.当分支功率高于分配策略的设定功率时,断开该分支的继电器,将故障数据返回总控制器。
8.当分支功率低于设定功率时,该分支的供电控制器继续采集下一时刻的分支功率,并将分支功率返回到总控制器。
9.当总控制器向供电控制器发出打开指令,供电控制器闭合位于同一分支的继电器。
10.当总控制器向供电控制器发出关闭指令,供电控制器断开位于同一分支的继电器。
11.进一步的,分配策略根据无人车的用电需求和供电网络决定。
12.进一步的,用电需求包括用电等级、用电量和设备位置。
13.一种无人车能量管理控制系统,针对上述的方法,包括供电电源、继电器、供电控制器和总控制器。
14.根据设备需求,确定供电电源的功率和继电器的触点容量。
15.供电电源为整个系统提供电力;总控制器与每个分支的供电控制器连接,各个供
电控制器并联;供电控制器分别与位于同一分支的继电器连接,继电器与设备连接。
16.进一步的,系统还包括线缆和采样器。
17.进一步的,供电电源、继电器、线缆、供电控制器、总控制器和采样器的设备型号由供电网络决定。
18.有益效果:
19.1、本发明提供了一种无人车能量管理控制方法,能够对设备的用电状态进行控制和监测。当某一分支出现异常时,本发明方法能够自动切断该分支,避免对其他设备造成影响。
20.2、本发明提供了一种无人车能量管理控制系统,包括供电电源、继电器、供电控制器和总控制器。根据设备需求,确定供电电源的功率和继电器的触点容量。供电电源为整个系统提供电力;总控制器与每个分支的供电控制器连接,各个供电控制器并联;供电控制器分别与位于同一分支的继电器连接,继电器与设备连接。本发明系统降低了设备和系统的耦合度,简化了工程实施和系统集成的复杂度。
21.3、本发明提供的一种无人车能量管理控制方法,工程实现简单,前期通过设备用电需求整理,根据用电等级、用电量、设备位置进行分类,得到分配策略,在这种分配策略下,仅需在每个分支上设置供电控制器和继电器,通过指令控制即可实现对无人车整车的能量集中式管理,简化了工程实现,降低了系统复杂度。
附图说明
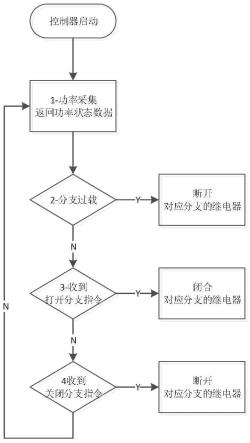
22.图1为本发明方法流程图。
23.图2为本发明实施例的系统结构图。
具体实施方式
24.下面结合附图并举实施例,对本发明进行详细描述。
25.如图1所示,本发明提出一种无人车能量管理及控制方法,无人车设置总控制器连接所有供电控制器,无人车的各类设备分别位于各个分支的电路上,每个分支上设置供电控制器和继电器,控制该分支的供电状态,具体步骤包括:
26.供电控制器采集所有的分支功率,将分支功率返回到总控制器;总控制器收到功率数据,对分支上的供电控制器发出指令。
27.当分支功率高于分配策略的设定功率时,断开该分支的继电器,将故障数据返回总控制器。分配策略根据无人车的用电需求和供电网络决定,包括用电等级、用电量和设备位置。
28.当分支功率低于设定功率时,该分支的供电控制器继续采集下一时刻的分支功率,并将分支功率返回到总控制器。
29.当总控制器向供电控制器发出打开指令,供电控制器闭合位于同一分支的继电器。
30.当总控制器向供电控制器发出关闭指令,供电控制器断开位于同一分支的继电器。
31.同时,本发明提出一种无人车能量管理控制系统,针对上述方法,包括供电电源、
继电器、供电控制器和总控制器。
32.根据设备需求,确定供电电源的功率和继电器的触点容量。
33.供电电源为整个系统提供电力;总控制器与每个分支的供电控制器连接,各个供电控制器并联;供电控制器分别与位于同一分支的继电器连接,继电器与设备连接。系统还包括线缆和采样器。供电电源、继电器、线缆、供电控制器、总控制器和采样器的设备型号由供电网络决定。
34.下面结合一个实施例,对发明进一步解释。
35.本发明实施例中,无人车的车载设备及功率为:工控机(60w)、交换机(10w)、路由器(10w)、激光雷达(40w)、声波雷达(10w)、灯光(30w)、音响(50w)、显示屏(100w)和摄像头(20w)。
36.步骤一、设备用电需求整理,根据用电等级、用电量、设备位置进行分类,得到分配策略。
37.从用电等级看,工控机、交换机、路由器、激光雷达、声波雷达等设备与自动驾驶功能和行车安全直接相关,所以列为一类设备,由供电电源1供电;灯光、音响、显示屏、摄像头等设备属于无人车的辅助功能,不影响自动驾驶功能和行车安全,所以列为二类设备,由供电电源2供电。
38.从用电量和设备位置看,一类设备中,工控机功耗高于雷达,且工控机的供电至关重要,所以将一类设备分为三路,工控机、交换机、路由器一路,激光雷达和声波雷达各为一路;二类设备中,显示屏功耗最高且摄像头位置相对集中,所以将二类设备分为三路,显示屏为一路,灯光和音响为一路,摄像头为一路。
39.步骤二:根据设备用电需求,设计供电网络的主线和分支,确定供电电源的功率需求、继电器触点容量以及功率分配策略。
40.每一供电分支对应一个采样器和一个继电器,分别用于电流采样和分支开合。经过步骤一、二的整理,得到如图2所示的分布图。
41.对于供电电源1:
42.继电器11负载功率:60 60 10 10=140(w)。
43.继电器12负载功率:40 40 40=120(w)。
44.继电器13负载功率:10 10 10=30(w)。
45.考虑供电余量和继电器常用规格,确定设计功率:
46.继电器11设计功率:250w。
47.继电器12设计功率:200w。
48.继电器13设计功率:50w。
49.所以,供电电源1的设计功率为500w。
50.对于供电电源2:
51.继电器21负载功率:30 50=80(w)。
52.继电器22负载功率:100 100=200(w)。
53.继电器23负载功率:20 20 20=60(w)。
54.考虑供电余量和继电器常用规格,确定设计功率:
55.继电器21设计功率:100w。
56.继电器22设计功率:300w。
57.继电器23设计功率:100w。
58.所以,供电电源2的设计功率为500w。
59.对于分配策略,供电电源1优先于供电电源2,每个供电电源内部,优先级由高到低依次为:分支1,分支2和分支3;
60.步骤三:设备选型,根据供电网络设计,确定供电电源、继电器、线缆、控制器和采样器等相关设备的型号。
61.考虑到设计、采购、生产的实际情况,选型如下:
62.供电电源:wtg1401-9,输出功率:12v/500w。
63.继电器:zl-150hc,触点容量:14v/5150a。
64.线缆:qvr-105,0.5、1.0、2.5、4.0(mm2)。
65.采样器:jlk-17,电流采样范围:0-50a。
66.步骤四:根据功率分配策略,进行控制器程序设计,包括功率采集、继电器控制、通信指令和分配策略实现等。
67.控制器程序设计:
68.每隔50ms,读取6个采样器的电流值,计算实时功率。
69.通过通信接口发送功率状态数据。
70.将实时功率和设计功率对比,当实时功率高于设计功率时,先断开对应分支的继电器,然后通过通信接口发送故障状态数据。
71.通信接口实时接收指令:
72.当收到打开分支指令时,闭合对应分支的继电器,然后返回应答;
73.当收到断开分支指令时,断开对应分支的继电器,然后返回应答。
74.针对该系统,本实施例的步骤为:
75.步骤一、控制器按照设定的采样周期对所有分支进行功率采集,然后返回功率状态数据。
76.步骤二、当某分支功率高于分配策略的设定功率时,断开对应分支的继电器,然后返回故障状态数据。
77.步骤三、控制器收到打开分支指令时,闭合对应分支的继电器,然后返回执行完成应答。
78.步骤四、控制器收到关闭分支指令时,断开对应分支的继电器,然后返回执行完成应答。
79.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。