1.本实用新型涉及智能扫地机基站技术领域,特别涉及一种智能扫地机器人基站及智能扫地机器人。
背景技术:
2.扫地机是一种能对地面进行自动吸尘的智能家用电器。一般采用刷扫和真空方式,依靠内置的程序,制定合理的清洁路线,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能,具备一定的智能,由于扫地机器人的尘袋的容积是有限的,如果尘袋装满没有及时清理时,扫地机器人无法继续将灰尘或垃圾收集至尘袋,导致扫地机无法有效完成清扫工作,影响用户使用体验,甚至还会影响扫地机器人硬件性能,因此,扫地机的尘袋的状态检测是保证扫地机器人正常工作的关键之一。
3.现有技术中对于扫地机进行尘袋更换时,需要人工手动将其取出更换,在出现人工忘记放尘袋的情况下,扫地机继续工作会导致扫地机的内部空间脏乱,进一步的导致风机堵塞,从而需要一个尘袋检测机构,市面上见到较多的是尘袋检测和翻盖检测分别采用两个不同的检测组件,此种方案可靠性不高,且走线复杂,不利于组装。
技术实现要素:
4.本实用新型公开了一种智能扫地机器人基站及智能扫地机器人,用于减少走线复杂,完成尘袋的检测的目的。
5.为达到上述目的,本实用新型提供以下技术方案:
6.第一方面,一种智能扫地机器人基站,包括基站本体、限位组件、检测组件、翻盖;所述翻盖转动安装于所述基站本体,用于与所述基站本体形成安装尘袋的容纳空间,所述翻盖朝向所述基站本体一侧设有底座以及与所述限位组件配合的第一限位部;
7.限位组件具有限位工位和避让工位,所述限位组件用于与所述尘袋配合以在所述限位工位和所述避让工位之间切换,当所述限位组件处于所述限位工位时,所述第一限位部可与所述限位组件接触以防所述翻盖扣合于所述基站本体,当所述限位组件处于所述避让工位时,所述翻盖可扣合于所述基站本体;当所述翻盖扣合于所述基站本体时,所述底座触发所述检测组件。
8.上述智能扫地机器人基站采用检测组件与限位组件联动的方式,利用限位组件两种不同的工位:限位工位与避让工位,在限位组件处于限位工位时,翻盖上的第一限位部与限位组件相干涉,使得翻盖无法扣合于基站本体,在尘袋安装后,会将限位组件切换至避让工位,使得翻盖能够扣合于基站本体,同时翻盖在扣合完毕后,其会触发检测组件,通过检测组件启动扫地机,本实用新型仅使用一个检测组件,完成同时对尘袋和翻盖的检测,走线简单,组装简单方便,同时杜绝了在人工更换尘袋后忘放尘袋时,扫地机在无尘袋安装的情况下启动而导致风机堵塞的问题。
9.可选地,所述限位组件包括弹性复位件、第一转轴、转动件,所述转动件通过所述
第一转轴转动连接在所述基站本体上;
10.所述转动件上具有第二限位部和驱动部,所述第二限位部用于与所述第一限位部配合,所述驱动部用于与所述尘袋配合以驱动所述限位组件由所述限位工位切换至所述避让工位;
11.可选地,所述弹性复位件用于始终给所述限位组件提供由所述避让工位切换至所述限位工位的驱动力。
12.可选地,所述第一转轴与所述转动件为一体结构,或者;
13.所述第一转轴与所述转动件可拆卸连接。
14.可选地,所述弹性复位件为扭簧,所述扭簧固定安装在所述第一转轴靠近所述检测组件的一端。
15.可选地,还包括传感组件,所述传感组件包括传感器以及与所述传感器连接的开关。
16.可选地,所述传感器朝向所述底座的一端设有用于安装所述开关的容纳槽,且所述开关至少部分探出所述容纳槽用于与所述传感器配合。
17.可选地,所述开关包括光电开关或霍尔检测开关或微动开关。
18.可选地,所述底座通过所述第二转轴转动连接在所述基站本体上,所述底座朝向所述基站本体的一端设有导向面。
19.可选地,所述基站本体内部设有安装所述尘袋的容纳空间,所述尘袋用于与所述驱动部配合,以使得所述限位组件由所述限位工位切换至所述避让工位。
20.可选地,所述第二限位部与所述驱动部形成开口朝向所述容纳空间的v形结构。
21.第二方面,本实用新型还提供一种智能扫地机器人,包括如前任一项所述的基站。
附图说明
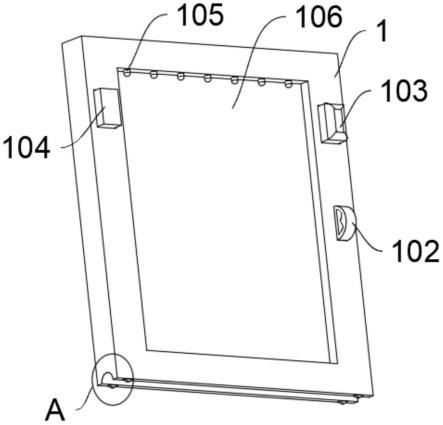
22.图1为本实用新型中未放置尘袋时整体结构示意图;
23.图2为本实用新型图1中a处放大示意图;
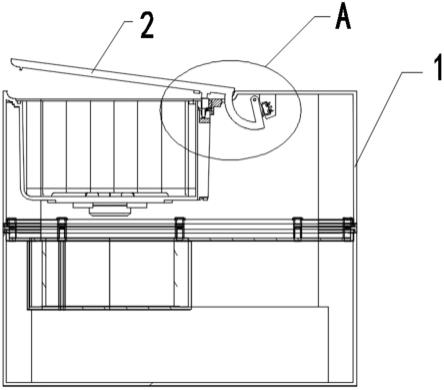
24.图3为本实用新型中放置尘袋后整体结构示意图;
25.图4为本实用新型图3中b处放大示意图;
26.图5为本实用新型中翻盖示意图;
27.图6为本实用新型中检测组件示意图;
28.图7为本实用新型中旋转组件示意图。
29.1-基站本体、2-翻盖、3-底座、4-第二转轴、5-第二限位部、6-驱动部、7
‑ꢀ
第一转轴、8-扭簧、9-尘袋、10-传感器、11-开关、12-第一限位部。
具体实施方式
30.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
31.如图1至图7所示,第一方面,本实用新型实施例提供了一种智能扫地机器人基站,
包括基站本体1、限位组件、检测组件、翻盖2;翻盖2转动安装于基站本体1,用于与基站本体1形成安装尘袋9的容纳空间,翻盖2朝向基站本体1一侧设有底座3以及与限位组件配合的第一限位部12;
32.限位组件具有限位工位和避让工位,限位组件用于与尘袋9配合以在限位工位和避让工位之间切换,当限位组件处于限位工位时,第一限位部12可与限位组件接触以防翻盖2扣合于基站本体1,当限位组件处于避让工位时,翻盖2可扣合于基站本体1;当翻盖2扣合于基站本体1时,底座3触发检测组件。
33.本方案采用检测组件与限位组件联动的方式,利用限位组件两种不同的工位:限位工位与避让工位,在限位组件处于限位工位时,翻盖2上的第一限位部12与限位组件相干涉,使得翻盖2无法扣合于基站本体1,在尘袋9安装后,会将限位组件切换至避让工位,使得翻盖2能够扣合于基站本体1,同时翻盖 2在扣合完毕后,其会触发检测组件,通过检测组件启动扫地机,本实用新型仅使用一个检测组件,完成同时对尘袋9和翻盖2的检测,走线简单,组装简单方便,同时杜绝了在人工更换尘袋9后忘放尘袋9时,扫地机在无尘袋9安装的情况下启动而导致风机堵塞的问题。
34.一种可能实现的方式中,参照图7,限位组件包括弹性复位件、第一转轴 7、转动件,转动件通过第一转轴7转动连接在基站本体1上,从而使得限位组件能够通过第一转轴7相对于基站本体1进行转动。
35.转动件上具有第二限位部5和驱动部6,第二限位部5用于与第一限位部12配合,驱动部6用于与尘袋9配合以驱动限位组件由限位工位切换至避让工位;
36.弹性复位件用于始终给限位组件提供由避让工位切换至限位工位的驱动力,利用弹性复位件自身弹性形变的效果,使得本实用新型中限位组价在由避让工位切换至限位工位时,其能够自行完成切换。
37.一种可能实现的方式中,参照图7,第一转轴7与转动件为一体结构;或者,第一转轴7与转动件可拆卸连接。
38.一种可能实现的方式中,继续参照图7,弹性复位件为扭簧8,扭簧8固定安装在第一转轴7靠近检测组件的一端,利用扭簧8恢复自身弹性形变的作用,将限位组件在避让工位状态结束后,自行切换至限位工位。
39.一种可能实现的方式中(图中未示出),至少一种弹性复位件为压簧,压簧的一端与驱动部6连接,另一端与基站本体1连接,通过压簧恢复自身弹性形变的作用下,将限位组件在避让工位状态结束后,自行切换至限位工位。
40.一种可能实现的方式中,参照图6,基站还包括传感组件,传感组件包括传感器10以及与传感器10连接的开关11。
41.一种可能实现的方式中(图中未示出),传感器10朝向底座3的一端设有用于安装开关11的容纳槽,且开关11至少部分探出容纳槽用于与传感器10 配合,进一步的减小了检测组件占据的空间,同时一部分突出于传感器10的外侧,能够使得底座更好的触发检测组件。
42.开关11包括光电开关或霍尔检测开关或微动开关,利用机械开关的方式,通过翻盖对其进行机械开闭,进一步的提高了本实用新型中传感器10工作的准确性。
43.一种可能实现的方式中,参照图5,底座3通过第二转轴4转动连接在基站本体1上,
底座3朝向基站本体1的一端设有导向面。
44.一种可能实现的方式中,参照图3,基站本体1内部设有安装尘袋9的容纳空间,尘袋9用于与驱动部6配合,以使得限位组件由限位工位切换至避让工位,从而本实用新型在尘袋9未安装完成时,翻盖2无法扣合至基站本体1 的上侧,进而杜绝了扫地机在无尘袋9安装的前提下,机器启动导致风机堵塞的问题。
45.一种可能实现的方式中,参照图7,第二限位部5与驱动部6形成开口朝向容纳空间的v形结构。
46.一种可能实现的方式中,本实用新型在具体使用时:人工手动将翻盖2打开,取出带更换的尘袋9,人工手动将尘袋9放入至基站本体1内部开设的容纳空间内部,尘袋9在放入的过程中,会与驱动部6配合使用,在第一转轴7 的作用下,驱动部6能够带动第二限位部5向靠近尘袋9的方向转动,使得限位组件切换至避让工位,此时第二限位部5不再与第一限位部12相互干涉阻碍,待到尘袋9完全安装至基站本体1的内部时,人工手动将翻盖2向靠近基站本体1的方向推动,使得翻盖2能够扣合至基站本体1的上侧,翻盖2在扣合完毕后,底座3与开关11相互接触并挤压,使得开关11闭合,进一步的通过开关11控制传感器10进行信号传递,启动扫地机,此时完成本实用新型中扫地机的启动过程。
47.当需要将本实用新型中的尘袋9进行取出更换时,人工打开翻盖,由基站本体1内部的容纳空间内部取出尘袋9,此时在扭簧8恢复自身弹性形变的作用,将限位组件在避让工位状态结束后,自行切换至限位工位,第二限位部5 干涉第一限位部12,此时翻盖2无法扣合至基站本体1的上侧。
48.第二方面,本实用新型还提供一种智能扫地机器人,包括如前任一种基站。
49.显然,本领域的技术人员可以对本实用新型实施例进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。