1.本实用新型涉及一种救生设备,尤其涉及一种智能双向交互式救生设备。
背景技术:
2.传统的遥控救生设备多采用单向的遥控控制方式,其操作方式为救援者在岸上手持遥控器,把遥控救生圈抛入水中后通过遥控器控制救生圈到落水者身边,落水者抓住救生圈后,再由救援者遥控操作救生圈回到岸边。
3.这种单向遥控的救援方式只是以救援者的控制为主,主要是目视,救援者和落水者之间缺乏有效的沟通手段,救援者一旦视线被遮挡,则不能进行有效的救援,同时在面对远距离激流环境下救援或者在风浪比较大的海上救援环境时由于单向控制方式,救援者本身的声音由于距离远,会受到激流或风浪的影响不能传输到被救援者耳中,不能和被救援者进行语音沟通。这也会对救援行动造成影响,贻误最佳的救援时机,导致救援的失败。从而对被救援者的生命安全造成影响。
4.有鉴于此,特提出本实用新型。
技术实现要素:
5.本实用新型的目的是提供了一种智能双向交互式救生设备,以解决现有技术中存在的上述技术问题。
6.本实用新型的目的是通过以下技术方案实现的:
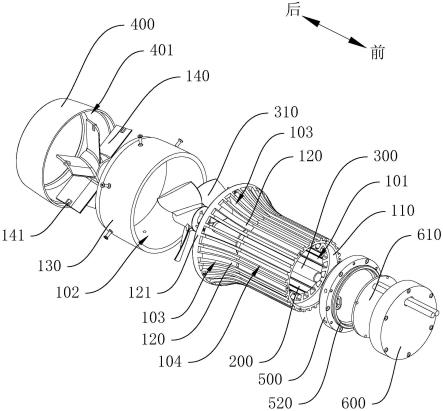
7.本实用新型的智能双向交互式救生设备,包括主体部分和远程遥控器,所述主体部分整体为一体成型设计,设备上安装有电池动力的推进器,电池为可拆卸结构,推进器内置于设备内部;
8.所述主体部分左右两侧呈对称结构,所述推进器包括左推进器和右推进器,分别位于主体部分两侧尾部,采用的是螺旋桨喷泵推进结构;
9.所述主体部分前端设计有硅胶防撞条,防撞条通过螺丝连接固定于设备最顶端,防撞条结构为箭头形状,贴合在设备顶端,并覆盖前端的全面面积;
10.所述主体部分安装有摄像头、双向对讲模块和无线传输模块,所述摄像头和双向对讲模块通过无线传输模块与所述远程遥控器无线连接,所述远程遥控器设有视频显示屏和双向对讲单元。
11.与现有技术相比,本实用新型所提供的智能双向交互式救生设备,用于水域救援领域,在面对复杂的救援环境时,在水域救援时建立起救援者和落水者之间的沟通桥梁,技术交互手段。实现救援者和落水者可以双向交互控制救生设备,同时也可以进行双向语音通话,视频传输,是一种具备可以让救援者与被救援者双向控制同时进行双向语音沟通的交互式水上救援利器。是智慧水域应用的一种创新型产品。
附图说明
12.图1为本实用新型实施例提供的智能双向交互式救生设备主视结构示意图;
13.图1-1为双向双向对讲模块及摄像头安装结构示意图;
14.图2为本实用新型实施例提供的智能双向交互式救生设备背面结构示意图;
15.图3为本实用新型实施例提供的智能双向交互式救生设备侧视结构示意图;
16.图4为本实用新型实施例提供的智能双向交互式救生设备俯视结构示意图;
17.图5为本实用新型实施例提供的智能双向交互式救生设备仰视结构示意图;
18.图6为本实用新型实施例提供的智能双向交互式救生设备立体结构示意图;
19.图中:
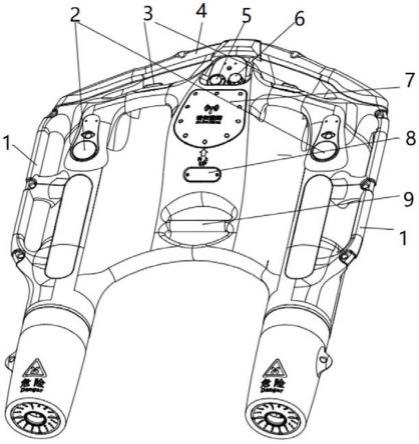
20.1、把手,2、示宽灯,3、控制按钮,3-1、左按钮,3-2、右按钮,4、防撞条,5、电源开关,6、充电座,7、上盖,8、铭牌,9、提手,10、喷口,11、进水口,12、电池盖,13、双向对讲模块,14、摄像头,15、照明灯。
具体实施方式
21.下面结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,这并不构成对本实用新型的限制。基于本实用新型的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型的保护范围。
22.首先对本文中可能使用的术语进行如下说明:
23.术语“和/或”是表示两者任一或两者同时均可实现,例如,x和/或y表示既包括“x”或“y”的情况也包括“x和y”的三种情况。
24.术语“包括”、“包含”、“含有”、“具有”或其它类似语义的描述,应被解释为非排它性的包括。例如:包括某技术特征要素(如原料、组分、成分、载体、剂型、材料、尺寸、零件、部件、机构、装置、步骤、工序、方法、反应条件、加工条件、参数、算法、信号、数据、产品或制品等),应被解释为不仅包括明确列出的某技术特征要素,还可以包括未明确列出的本领域公知的其它技术特征要素。
25.术语“由
……
组成”表示排除任何未明确列出的技术特征要素。若将该术语用于权利要求中,则该术语将使权利要求成为封闭式,使其不包含除明确列出的技术特征要素以外的技术特征要素,但与其相关的常规杂质除外。如果该术语只是出现在权利要求的某子句中,那么其仅限定在该子句中明确列出的要素,其他子句中所记载的要素并不被排除在整体权利要求之外。
26.除另有明确的规定或限定外,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如:可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本文中的具体含义。
27.术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化描述,而不是明示或
暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本文的限制。
28.本实用新型实施例中未作详细描述的内容属于本领域专业技术人员公知的现有技术。本实用新型实施例中未注明具体条件者,按照本领域常规条件或制造商建议的条件进行。本实用新型实施例中所用试剂或仪器未注明生产厂商者,均为可以通过市售购买获得的常规产品。
29.本实用新型的
30.智能双向交互式救生设备,其特征在于,包括主体部分和远程遥控器,所述主体部分整体为一体成型设计,设备上安装有电池动力的推进器,电池为可拆卸结构,推进器内置于设备内部;
31.所述主体部分左右两侧呈对称结构,所述推进器包括左推进器和右推进器,分别位于主体部分两侧尾部,采用的是螺旋桨喷泵推进结构;
32.所述主体部分前端设计有硅胶防撞条,防撞条通过螺丝连接固定于设备最顶端,防撞条结构为箭头形状,贴合在设备顶端,并覆盖前端的全面面积;
33.所述主体部分安装有摄像头、双向对讲模块和无线传输模块,所述摄像头和双向对讲模块通过无线传输模块与所述远程遥控器无线连接,所述远程遥控器设有视频显示屏和双向对讲单元。
34.主体部分安装有控制模块和导航模块;
35.所述导航模块包括gps/北斗双模定位模块、指南针模块、信号接收单元和陀螺仪,所述导航模块与所述控制模块通过信号线连接;
36.所述控制模块与所述左推进器和右推进器通过控制线连接,并在主体部分的前部两侧左右延伸出的两个把手上分别有控制按钮。
37.所述导航模块设有一键返航单元、失联返航单元、航线自动修正单元、自动驾驶单元、倾覆自动翻转单元。
38.在救援者视线被遮挡时,需要被救援者面对危机需要自己操控救生设备时,救援者通过远程遥控器释放救生设备的控制权,落水者通过操作设备前端把手上的控制按钮实现对救生设备的操控,具体操控方式为:
39.两个按钮同时按下为救生设备前进,只按下左边的按钮时左边对应的推进器转动喷水从而实现救生设备向右的转向,同理只按下右边的按钮时右边对应的推进器转动喷水从而实现救生设备向左转向;
40.所述双向对讲模块实现双向对讲功能的方式:
41.摄像头画面通过无线传输模式传回到远程遥控器并显示,同时双向对讲模块的声音也通过无线传输传输到遥控器,从而实现视频和语音的回传,救援者和落水者可以实现双向的语音交互;
42.所述一键返航单元实现一键返航功能的方式:
43.在救生设备开机时gps或北斗定位模块会确定一个救生设备的初始位置的经纬度坐标信息,这个初始位置即为返航点,返航点的经纬度坐标信息会存储在控制模块内存芯片上;
44.救生设备在救援过程中行驶到远离返航点的任意位置时,当救援者在遥控器上触
发一键返航按钮时,遥控器此时为发射端,救生设备内部的遥控接收端会接收到遥控器发射端发射过来的返航信号,接收端把返航信号传递到救生设备的控制模块,控制模块会启动救生设备指南针模块确定方向,同时根据控制模块内部存储的初始位置的经纬度坐标信息确定返航位置坐标,控制模块根据方向信息和位置信息控制输出信号使推进器动作,从而控制救生设备向返航点前进,返航过程中指南针模块会根据当前坐标位置不断修正方向传递给控制模块,控制模块持续控制救生设备动力输出,一直到当前位置坐标和初始位置坐标重合,从而实现返航功能;
45.所述失联返航单元实现失联返航的方式:
46.救生设备在正常的行驶过程中遥控器发射端和救生设备的接收端不断的进行收发信号,当收发信号中断持续10秒后,控制模块会自动启动返航功能;
47.所述航线自动修正单元实现航向修正功能的方式:
48.航向修正功能为救生设备在行驶过程中一直会保持直线行驶不会出现航向偏离,救生设备航向修正功能启动时,遥控器会给救生设备接收模块发送信号,接收模块收到信号后传递给控制模块,控制模块启动指南针模块,指南针模块会确定当前设备方向为行驶方向,控制模块通过指南针反馈回来的方向信息不断的修正左右两个推进器的动力输出,从而保持直线行驶,实现航向修正功能;
49.所述自动驾驶单元实现自动驾驶功能的方式:
50.自动驾驶功能需要预先在遥控器app地图上预先设定自动行驶的路线规划,相当于预先给救生设备控制模块提供方向信息和坐标信息,然后自动驾驶开启后,指南针模块提供方向信息,gps/北斗模块提供坐标信息,救生设备控制模块按照地图上预先设定位置和方向信息控制左右两个推进器动力输出,并不断根据信息进行调整,从而实现自动行驶;
51.所述块倾覆自动翻转单元实现倾覆自动翻转的方式:
52.救生设备在行驶过程中,救生设备内部的陀螺仪会感知救生设备的姿态,当救生设备正面向上时,陀螺仪相当于没有信号输出,当救生设备姿态发生反转,比如被浪打翻时,此时救生设备反转180度,此时陀螺仪信号发生变化并输出给控制模块,控制模块会控制救生设备的左右两个推进器螺旋桨反转,此时推进器喷水口变成进水口,进水口变成喷水口,由螺旋桨反转产生的吸力会把救生设备的尾部的推进器拉入水面以下,此时救生设备会从背面向正面反转,直到救生设备背面和水面垂直后,陀螺仪停止信号输出,控制模块控制的左右两个推进器停止反转,救生设备背面利用旋转的惯性继续反转,从而实现倾覆自动反转功能。
53.主体部分下半部分空出的部分为趴附落水者的u型结构,左右两侧为安装推进器的位置,整体为圆柱形仓体,在圆柱形仓体正面方向上为反光贴条及标识的粘贴位置,其形状为跑道型,平面位置低于圆柱的表面,在圆柱体底部推进器喷口位置有危险警告标识;
54.推进器的电机及螺旋桨内置于所述圆柱形仓体内部,圆柱形仓体形成一个密闭空间,电机一端用螺丝固定于壳体内部,电机与螺旋桨之间用联轴器固定,螺旋桨外部有圆形喷口,另一端螺旋桨外部的喷口通过尾部固定于圆柱形仓体的尾部端面上,尾部端面用螺丝固定于壳体;
55.推进器外部设计有防水罩,防水罩用螺丝固定于圆柱形仓体表面。
56.在主体部分正面防撞条中间突起位置的下端,是固定双向对讲模块的两颗内置预
埋螺母及一个凹槽,凹槽为预留的引出线接口,预埋螺母下端有开关和充电接口,充电接口是防水设计;
57.开关和充电接口的下方为控制电路盒的上盖,上盖上半部分为方形有倒角,下半部分为圆形,控制电路及控制模块位于控制电路盒的上盖下方的仓体内,上盖四周有螺纹孔通过螺丝把上盖和设备主体固定连接成一体。
58.在控制电路盒的上盖的连接位置向左右延伸出两个把手到主体部分的两侧,左右两个控制按钮通过螺丝连接与把手之上,按钮为防水结构;
59.在把手靠近两侧的位置的下方是两个内置螺纹孔的位置,此位置安装左右两个照明灯,照明灯下方为菱形凹槽,凹槽内部有内置螺母和引出线接口;
60.左右两侧菱形凹槽的下边主体部分正面的两边设有两个圆形的示宽灯。
61.主体部分两侧边缘位置左右两边各有两个把手,在左右两边把手上下两侧及把手中间位置设有多个贯穿于设备主体的固定漂浮绳通孔;
62.主体部分正面中间位置设计有一个一体成型的用于救援者携带的凹槽式提手;
63.在提手的上方有个凹槽,是设备的铭牌位置,铭牌通过螺丝和设备本身的内置螺母连接为一体。
64.主体部分背面整体设计为三段式设计,两侧各有一个突起的子弹型弧面,中间有个梭子形突起的弧面,在中间弧面的下方有斜面延伸到设备的前后交界面;
65.主体部分背面两侧的中间位置为电池仓,电池放置于电池仓内,电池仓外面有电池盖,电池盖通过螺母与设备连接。
66.综上可见,本实用新型实施例的智能双向交互式救生设备,用于水域救援领域,在面对复杂的救援环境时,在水域救援时建立起救援者和落水者之间的沟通桥梁,技术交互手段。实现救援者和落水者可以双向交互控制救生设备,同时也可以进行双向语音通话,视频传输。
67.设备本身具备一键返航,失联返航,航向修正,自动驾驶,倾覆自动翻转等功能,是一种具备可以让救援者与被救援者双向控制同时进行双向语音沟通的交互式水上救援利器。是智慧水域应用的一种创新型产品。
68.不但救援者可以操控设备,在救援者视线被遮挡时,需要被救援者面对危机需要自己操控救生设备时可以自己操控,又或者需要救援者和被救援者在危急时刻可以进行双向语音沟通的救援环境时,一种具备可以让救援者与被救援者双向控制同时进行双向语音沟通的交互式水上救援设备就是非常有必要的。
69.主体部分整体为一体成型设计,设备上安装有电池动力的动力推进器。电池为可拆卸设计,推进器内置于设备内部。把设备抛入水中后,救援者可以采用远程遥控器控制设备的运行,同时被救援者也可以通过设备本身把手上的控制按钮进行控制。设备上安装有导航模块具有一键返航,失联返航,航线自动修正,自动驾驶,倾覆自动翻转等功能。设备安装4g摄像头进行视频回传。同时安装对讲模块救援者与被救援者可以进行双向通话沟通,是一种具备可以让救援者与被救援者双向控制同时进行双向语音沟通的交互式水上救援利器。
70.为了更加清晰地展现出本实用新型所提供的技术方案及所产生的技术效果,下面以具体实施例对本实用新型实施例所提供的进行详细描述。
71.实施例1
72.如图1至图6所示,设备主体本身为一体成型,左右两侧呈对称结构,推进器位于设备两侧尾部采用的是螺旋桨喷泵推进结构。
73.设备前端设计有硅胶防撞条,防撞条通过螺丝连接固定于设备最顶端,防撞条结构很好的贴合在设备顶端,并覆盖前端的全面面积。防撞条为箭头形状。
74.在设备正面防撞条中间突起位置的下端,是固定双向对讲模块的两颗内置预埋螺母及一个凹槽,凹槽的作用为预留的引出线接口,可以在需要的时候从设备本身引线出来。预埋螺母下端有开关和充电器接口。此接口是防水设计,防水等级达到ip67.
75.开关和充电接口的下方为设备控制电路盒的上盖,上盖上半部分为方形有倒角,下半部分为圆形,设备控制电路及控制模块位于设备控制电路盒的上盖下方的仓体内。上盖四周有螺纹孔通过螺丝把上盖和设备主体固定连接成一体。
76.在开关电源和充电接口和设备上盖的连接位置向左右延伸出两个把手到设备的两侧。把手上有按压按钮。通过此按压按钮可以控制设备的前进和左右方向。操作方法为单独按下左边为向左前进,单独按下右边为向右前进,左右同时按下为直线前进。左右两个按钮通过螺丝连接与把手之上,按钮为防水设计。
77.在中间把手靠近两侧的位置的下方是两个内置螺纹孔的位置,此位置是左右两个照明灯的位置,照明灯的作用是夜间救援时提供照明。照明灯下方为引线口位置也是一个凹槽设计,此凹槽为菱形,凹槽内部有内置螺母。此凹槽的作用为方便安装其他设备时从设备本身引线出来。
78.左右两侧菱形凹槽的下边为两个圆形的示宽灯,分别位置设备正面整体的两边,夜间可以提供方向辨别。示宽灯光的颜色为左红右绿。
79.设备两侧边缘位置左右两边各有两个把手,方便落水者抓住救生设备。在左右两边把手上下两侧及把手中间位置设计有贯穿于设备主体的通孔。一边为四个,共有八个通孔,可以在通孔位置固定漂浮绳等容易被落水者轻松抓住的绳索。方便落水者抓牢。
80.设备整体下半部分空出的部分为u型,这样落水者可以通过此处把上半身趴在设备上面。左右两侧为推进器位置,整体为圆柱形,在圆柱形正面方向上为反光贴条及标识的粘贴位置。其形状为跑道型。平面位置低于圆柱的表面。在圆柱体底部推进器喷口位置有危险警告标识。
81.设备正面中间位置设计有一个和设备一体成型的凹槽式把手,这个把手的作用方便救援者携带。
82.在中间把手的上方有个凹槽,是设备的铭牌位置,铭牌通过螺丝和设备本身的内置螺母连接为一体。
83.设备背面整体设计为三段式设计。这样设计的目的为能有效的进行分水,使设备在运行过程中遇到的水的阻力变得更小,运行速度更快。两侧各有一个突起的弧面。两侧弧面为子弹型。中间有个突起弧面。中间弧面为梭子形,在中间弧面的下方有斜面延伸到设备的前后交界面,此处的斜面的意义在于在设备运行过程中可以有效的减少水流向上进行的喷流。
84.设备背面两侧的中间位置为电池仓,电池放置于电池仓内,电池仓外面有电池盖。电池盖通过螺母和设备连接,通过拆卸螺母可快速对电池进行更换。
85.设备背面两侧尾部为推进器。推进器电机及螺旋桨内置于设备两侧的圆柱形仓体内部,电机一端用螺丝固定于设备壳体内部,电机和螺旋桨之间用联轴器固定,螺旋桨外部有圆形喷口,另一端螺旋桨外部的喷口通过尾部固定于圆柱形仓体的尾部端面上,尾部端面用螺丝固定于设备壳体。
86.推进器外部设计有防水罩。防水杂物,水草等被吸入螺旋桨。防水罩用螺丝固定于圆柱形仓体表面。
87.圆柱形仓体形成一个密闭空间,电机运行螺旋桨转动时,水流经过防水罩进入圆形仓体内部,流经电机,经过螺旋桨从尾部喷口喷出,产生动力,流经电机的水流能有效的对电机及其控制电路进行散热冷却,不必单独再使用散热系统。
88.救援者本身可以通过遥控器操控救生设备,在救生设备前端安装有双向对讲模块,同时安装有摄像头,摄像头画面可以通过无线传输模式传回到遥控器并显示,同时对讲模块的声音也可以通过无线传输传输到遥控器,从而实现视频和语音的回传,救援者和落水者可以实现双向的语音交互。
89.该设备实现一键返航,失联返航,航向修正,自动驾驶,倾覆自动翻转等功能描述如下:
90.救生设备内部的控制模块包含有gps北斗定位模块,指南针模块,信号接收单元,
91.陀螺仪模块,其中gps北斗定位模块主要提供位置信息,指南针模块提供方向信息,信号接收单元提供信号接收,陀螺仪提供设备姿态信息。控制模块负责信号输出控制救生设备的左右推进器的动力输出实现左右转弯或前进动作。
92.一键返航功能实现方式:救生设备内部安装有gps/北斗双模定位模块及指南针模块,通过救生设备内部的控制模块电路接收gps或北斗信号,在救生设备开机时gps或北斗定位模块会确定一个救生设备的初始位置的经纬度坐标信息,这个初始位置即为返航点。返航点的经纬度坐标信息会存储在控制模块内存芯片上。救生设备在救援过程中行驶到远离返航点的任意位置时,当救援者在遥控器上触发一键返航按钮时,遥控器此时为发射端,救生设备内部的遥控接收端会接收到遥控器发射端发射过来的返航信号,接收端把返航信号传递到救生设备的控制模块,控制模块会启动救生设备指南针模块确定方向,同时根据控制模块内部存储的初始位置的经纬度坐标信息确定返航位置坐标,控制模块根据方向信息和位置信息控制输出信号使推进器动作,从而控制救生设备向返航点前进,返航过程中指南针模块会根据当前坐标位置不断修正方向传递给控制模块,控制模块持续控制救生设备动力输出,一直到当前位置坐标和初始位置坐标重合。从而实现返航功能。
93.失联返航实现方式:救生设备在正常的行驶过程中遥控器发射端和救生设备的接收端不断的进行收发信号。当收发信号中断持续10秒后,控制模块会自动启动返航功能,其返航过程原理和上述一键返航类似。只是两者的触发方式不一样,一键返航由遥控器主动发射信号触发返航,而失联返航由收发信号中断触发返航。
94.航向修正功能实现方式:航向修正功能为救生设备在行驶过程中一直会保持直线行驶不会出现航向偏离。救生设备航向修正功能启动时,遥控器会给救生设备接收模块发送信号,接收模块收到信号后传递给控制模块,控制模块启动指南针模块,指南针模块会确定当前设备方向为行驶方向,控制模块通过指南针反馈回来的方向信息不断的修正左右两个推进器的动力输出,从而保持直线行驶,实现航向修正功能。
95.自动驾驶功能实现方式:自动驾驶功能需要预先在遥控器app地图上预先设定自动行驶的路线规划,相当于预先给救生设备控制模块提供方向信息和坐标信息,然后自动驾驶开启后,指南针模块提供方向信息,gps/北斗模块提供坐标信息,救生设备控制模块按照地图上预先设定位置和方向信息控制左右两个推进器动力输出,并不断根据信息进行调整,从而实现自动行驶。
96.倾覆自动翻转实现方式:救生设备在行驶过程中,救生设备内部的陀螺仪模块会感知救生设备的姿态,当救生设备正面向上时,陀螺仪相当于没有信号输出,当救生设备姿态发生反转,比如被浪打翻时,此时救生设备反转180度。此时陀螺仪信号发生变化并输出给控制模块,控制模块会控制救生设备的左右两个推进器螺旋桨反转,此时推进器喷水口变成进水口,进水口变成喷水口,由螺旋桨反转产生的吸力会把救生设备的尾部的推进器拉入水面以下,此时救生设备会从背面向正面反转,直到救生设备背面和水面垂直后,陀螺仪停止信号输出,控制模块控制的左右两个推进器停止反转,救生设备背面利用旋转的惯性继续反转,从而实现倾覆自动反转功能。
97.在救援者视线被遮挡时,需要被救援者面对危机需要自己操控救生设备时,自己操控方法如下:
98.救生设备前端的两端把手上有控制按钮,救援者遥控救生设备到落水者身边时,可以通过遥控器释放救生设备的控制权,落水者通过操作设备前端把手上的控制按钮实现对救生设备的操控。具体操控方式为:两端把手上各有一个控制按钮,两个开关同时按下为救生设备前进,只按下左边的按钮时左边对应的推进器转动喷水从而实现救生设备向右的转向,同理只按下右边的按钮时右边对应的推进器转动喷水从而实现救生设备向左转向。通过以上操作实现救生设备的前进及左右转向。
99.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型披露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权利要求书的保护范围为准。本文背景技术部分公开的信息仅仅旨在加深对本实用新型的总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。