一种特殊浮力均衡装置辅助auv艏部坐底的结构与方法
技术领域
1.本发明涉及的领域是auv的坐底方式,具体表现为一种不依赖地形的特殊浮力均衡装置辅助auv艏部坐底的结构与方法。
背景技术:
2.随着海洋科学的不断发展,自主水下航行器(autonomous underwater vehicle,auv)在海底科学调查和水下目标勘察方面发挥巨大作用。auv常用于海底长期定点观察以及海底探测等任务,因此,auv由水中下潜坐落至海底的技术一直是一项国内外值得研究的课题。但是,auv坐底的过程中,经常会受到海底地形起伏、坐落面积狭小等因素的影响。
3.目前国内外存在多种auv坐底的策略方法,但是很多坐底方法都需要大面积平稳的海底地形。例如《具有着陆坐底功能的水下自航行器系统控制与试验研究》中提到通过压载水舱注水实现坐底功能的欠驱动水下航行器,航行器到达目标坐底区域后,打开压载水舱注水阀门,水舱以较快速度注满水,此时航行器总体重力大于浮力开始自由下沉。除了注水坐底还有浮力调节坐底的方法,但是这些方法都是通过优化坐底方式来达到节能续航的目的,他们都需要坐底在大范围平坦的海底地形,不适合小范围平整的地形。本发明基于此,设计了一种特殊浮力均衡装置辅助auv艏部坐底的方法。此设计的auv利用特定的艏部结构,仅需要auv部分坐底即艏部坐底。其优点是可以在一些特殊的狭小的海底地形上坐底,不但减少了探测海底地形的能源损耗,延长auv坐底工作的时间,而且可选择的海底坐底区域更多,满足了在特殊情况下必须要在固定范围内坐底的需求。
技术实现要素:
4.本发明在基于已知海底深度和水下环境的条件下,设计了一种不依赖地形的特殊浮力均衡装置辅助auv艏部坐底的结构与方法。
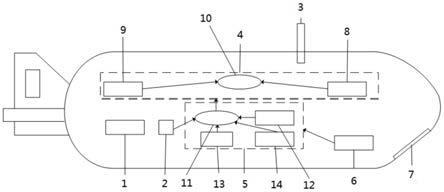
5.本发明的艏部坐底结构采用专利号为“201911152439.5”中提供的结构,在此基础上又增加两部分,可动态调整角度的测高声纳和艏部底部加固结构模块。其主要是由蓄电池、深度计、组合天线、浮力调节系统、综合采集与控制系统、测高声纳以及艏部加固结构模块组成。艏部安装可动态调节角度的测高声纳,用以实时检测艏部与海底的距离。在保证艏部呈流体型结构的前提下,将艏部底部设计成平面,便于坐底时与海底地形的接触,同时对艏部进行结构加固。(结构图如图1所示)
6.浮力调节系统由艏耐压油箱、艉耐压油箱、油囊、阀门组件、电机以及油泵组成,其中艏耐压油箱、艉耐压油箱安装于auv的中轴线上,艏耐压油箱位于艏舱中,艉耐压油箱位于艉舱中,油囊安装于auv载体的中轴线与艏、艉耐压油箱连接中线交点处,通过油路管道与阀门、油泵以及油箱相连接。浮力调节系统用于调节auv的浮力以及纵倾角,实现auv 的上浮下潜以及姿态调整。组合天线由无线电天线、北斗接收天线和升降机构组成,用于接收外来任务等信息。综合采集与控制系统由控制器、惯性导航系统、无线电台以及北斗卫星定位系统组成。综合采集与控制系统、测高声纳、浮力调节系统之间采用耐压防水电缆进行通
讯与供电,从而实现信息的传送。auv在水面时通过北斗卫星定位系统确定位置并将位置信息传送给惯性导航系统;下潜后,惯性导航系统以初始点的信息为基础,再根据航行器的变化推算出水下的状态,经过综合分析后输出auv的位置及姿态等信息给控制器。综合采集与控制系统会根据auv姿态变化调整浮力调节系统并规划出下潜轨迹,测高声纳可以反馈海底距离以便auv实时调整下潜方向。
7.本发明设计的测高声纳装置安装在艏部下方,当auv姿态保持水平状态时测高声纳与水平面保持垂直,保证声纳传播的声波始终朝向海底。当auv执行下潜任务时,航行器会呈倾斜状态,测高声纳开始探测海底距离,此时控制器根据舱体姿态角度的变化以及惯导系统的反馈调整扭矩电机,使得测高声纳时刻与水平面保持垂直状态,保证声纳传播的声波始终方向朝下。
8.本发明实现auv艏部坐底方法如下:
9.auv下潜之前,在水面上首先通过组合天线接收任务信息并利用北斗卫星定位系统自主航行至指定位置,并对水下情况进行探查。auv确定可以执行坐底任务之后,将组合天线收回至舱内,通过控制器控制油泵工作,将油囊与艉耐压油箱中的油全部注入艏耐压油箱中。这时油囊体积最小,auv受到的浮力最小。并且由于艉耐压油箱中的油逐渐注入到艏耐压油箱中,此时auv的重心逐渐调整到装置的艏舱中,auv的艏倾角逐渐变大,其姿态逐渐呈坐底时的倾斜状态。下潜时姿态的改变减少了迎水面积和阻力,从而实现auv无动力下潜。 auv下潜过程中,综合采集与控制系统实时监控下潜轨迹并进行微调,此时测高声纳会实时的反馈与海底的距离。当auv航行至目标坐底区域的上方时,调整浮力调节系统,将艏部耐压油箱中的部分油逐渐注入油囊,此时浮力逐渐变大,但仍呈负浮力状态,auv缓慢下沉,此时重心仍然在艏部,便于艏部坐底。综合采集与控制系统根据测高声纳反馈的海底距离调整下潜速度以实现重力坐底,通过艏部加固结构模块实现安全坐底,即auv艏部底部结构加固,用以保障与海底地形的接触。最终auv重力坐底,保持静默状态。
10.本发明的有益效果:
11.1、下潜时通过控制器对浮力调节系统进行控制,从而对航行器的浮力及姿态进行调节,使浮力达到最小。并调整航行器姿态为倾斜状态,减小下潜时的迎水面积和阻力,从而极大地减少了下潜时间。同时利用重力大于浮力的方式下潜,大大节省了能源损耗。
12.2、测高声纳可以根据auv姿态角度的变化来动态调整角度,保证其始终向海底传播声波,提高了声纳的效率。其不但适用在auv主动进行角度调整的场合,而且当auv被动姿态发生改变时,依然可以动态调整角度,体现了测高声纳的高效性和灵活性。
13.3、auv坐底面积小,减小了对海底地形的依赖,节省了auv水下探测的时间与能源,并且auv对海底地形平稳面积的要求降低,可以选择的目标坐底区域增加,可以适应在特殊情况下必要的坐底工作。
附图说明
14.图1是本发明auv艏部坐底结构的组成示意图;
15.图2是测高声纳姿态调节控制框图;
16.图3是测高声纳结构解析图;
17.图4是本发明auv执行坐底任务的过程示意图;
18.图5是本发明auv执行坐底任务的工作流程图;
19.其中1为蓄电池、2为深度计、3为组合天线、4为浮力调节系统、5为综合采集与控制系统、6为测高声呐、7为艏部加固结构模块、8为艏耐压油箱、9为艉耐压油箱、10为油囊、 11为控制器、12为惯性导航系统、13为无线电台、14为北斗卫星定位系统、15为扭矩电机。
具体实施方式
20.结合图1,本发明的设计结构主要由蓄电池、深度计、组合天线、浮力调节系统、综合采集与控制系统、测高声纳以及艏部加固结构模块组成。其中浮力调节系统由艏耐压油箱、艉耐压油箱、油囊、阀门组件、电机以及油泵组成;综合采集与控制系统由控制器、惯性导航系统、无线电台以及北斗卫星定位系统组成;组合天线由无线电天线、北斗接收天线和升降机构组成。艏部安装可动态调整角度的测高声纳,用以实时检测艏部与海底的距离。在保证艏部呈流体型结构的前提下,将艏部底部设计成平面,便于坐底时与海底平面的接触,同时对艏部进行结构加固。
21.结合图2和图3,本发明设计一种安装在艏部下方的测高声纳。测高声纳探测一端传播声波,同时另一端连接扭矩电机。测高声纳开始探测海底距离,当auv出现倾斜时,综合采集与控制系统结合当前auv姿态角度以及惯导系统的反馈来调整扭矩电机的旋转,动态调整测高声纳的角度,使测高声纳始终保持与海底垂直的姿态,保证声纳传播的声波始终朝向海底。
22.结合图4和图5,本发明中auv执行坐底工作过程有以下具体步骤:
23.步骤一:首先对作业水域的深度以及水下环境信息进行探测,进行水面定位,判断是否满足下潜条件。
24.步骤二:auv的控制器通过组合天线接收远程控制中心发来的下潜经纬度位置、目标深度等参数;auv通过北斗卫星定位系统或惯性导航系统自主航行至指定下潜位置,并将组合天线收回到舱内。
25.步骤三:开始下潜,通过控制器控制油泵将油囊中的油全部充入艏耐压油箱中,具体的流程为油囊中的油充入到艏耐压油箱中,同时将艉耐压油箱中的油全部充入到艏耐压油箱中。此时auv的重心逐渐调整到艏部。减小auv所受浮力的同时调整auv下潜的姿态由水平变为倾斜状态。
26.步骤四:控制器根据auv角度变化调整扭矩电机,保证测高声纳传播的声波垂直朝向海底。综合采集与控制系统根据测高声纳与惯导系统反馈的位置信息规划下潜轨迹,并实时微调。
27.步骤五:到达坐底目标区域之后,将艏部耐压油箱中的部分油逐渐注入油囊,但仍呈负重力状态,此时auv减速下潜。艏部耐压油箱部分油注入油囊,重心仍然在艏部,保证auv 以艏部为重心,通过艏部加固结构模块实现安全坐底,即艏部结构经过加固,以保障舱体和海底地形顺利接触以及坐底。根据测高声纳实时反馈的海底距离,综合采集与控制系统调整 auv艏部坐底,开始坐底探测工作。
28.本发明提供了一种不依赖地形的特殊浮力均衡装置辅助auv艏部坐底的结构与方法。本发明在地形狭小,不足以常规坐底的海底地质条件下,通过以倾斜方式悬停,采用一种加固的艏部结构实现狭小海底的坐底行为。本发明设计了可动态调整角度的测高声纳,
用于探测海底距离。艏部底部结构设计成加固的平面,便于接触海底地形。通过浮力均衡装置的调节, auv艏部部分坐底。本发明设计的优点在于不需要大规模探查水底情况,对海底地形要求降低,所以此auv的坐底可以适应更多的海底区域,以满足在特殊情况下必须要在固定范围内坐底的需求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
