1.本技术涉及光学成像技术领域,具体涉及一种光学成像系统、取像模组及电子装置。
背景技术:
2.近年来,随着具有摄影功能的可携式电子产品的兴起,光学成像系统的需求日渐提高。一般光学成像系统的感光元件为感光耦合组件(charge coupled device,ccd)或互补性氧化金属半导体组件(complementary metal-oxide semiconductor sensor,cmossensor),随着半导体制程技术的精进,感光元件的像素尺寸得以缩小,光学成像系统逐渐往高像素领域发展,对成像品质的要求也日益增加。
3.传统搭载于可携式电子产品上的光学成像系统,多采用四片式透镜结构为主,随着智能手机(smart phone)与pda(personal digital assistant)等电子装置的盛行,光学成像系统在像素与成像品质上也获得了迅速攀升,但已知的四片式的光学成像系统无法满足更高阶的摄影系统,例如具有广角或长焦的功能。目前的五片式光学成像系统,在成像品质良好的基础上,可具有广角或长焦的单一功能,但光学成像系统的总长度不易缩短,有碍于小型化电子产品的应用。
技术实现要素:
4.鉴于以上内容,有必要提出一种光学成像系统、取像模组及电子装置,以解决上述问题。
5.本技术的一实施例提供了一种光学成像系统,由物侧到像侧依次包括:
6.第一透镜,所述第一透镜的像侧面在近光轴处为凹面;
7.第二透镜,具有负屈折力;
8.第三透镜,具有正屈折力,所述第三透镜的像侧面在近光轴处为凹面;
9.第四透镜,具有负屈折力;及
10.第五透镜,具有正屈折力;
11.所述光学成像系统满足以下条件式:
12.95
゜
/mm《fov/tl5《105/mm,1mm-1
《fno/tl4《1.5mm-1
;
13.其中,fov为所述光学成像系统的最大视场角,tl5为所述第五透镜的物侧面至成像面在光轴方向的距离,fno为所述光学成像系统的光圈数,tl4为所述第四透镜的物侧面至所述成像面在光轴方向的距离。
14.上述的光学成像系统通过紧凑的空间排布和合理的屈折力分配,实现了轻薄化及较短的总长,有利于小型化电子产品的应用;在满足上述条件时,可使入射光线在进入光学成像系统时其折射角度变化较为和缓,可有效避免光学成像系统像差的过度增生,并可降低杂散光的形成,成像质量较好,且具有较大焦距,可用于清楚拍摄远景,又具有大视场角,可清楚拍摄近景。
15.在一些实施例中,所述第四透镜的物侧面在近光轴处为凹面,所述第四透镜的像侧面在近光轴处为凸面。
16.在一些实施例中,所述第五透镜的像侧面在近光轴处为凹面,所述第五透镜的像侧面在近边缘处为凸面,所述第五透镜的物侧面和像侧面中的至少一者为非球面。
17.在一些实施例中,所述光学成像系统满足以下关系式:
18.1.5《imgh/f《2.0;
19.其中,imgh为所述光学成像系统的最大视场角所对应的像高的一半,f为所述光学成像系统的有效焦距。
20.在一些实施例中,所述光学成像系统满足以下关系式:
21.0.75《(v2 v3 v5)/(v1 v4)《1;
22.其中,v1为所述第一透镜的色散系数,v2为所述第二透镜的色散系数,v3为所述第三透镜的色散系数,v4为所述第四透镜的色散系数,v5为所述第五透镜的色散系数。
23.在一些实施例中,所述光学成像系统满足以下关系式:
24.3《tl1/f《3.5;
25.其中,tl1为所述第一透镜的物侧面至成像面在光轴方向的距离,f为所述光学成像系统的有效焦距。
26.在一些实施例中,所述光学成像系统满足以下条件式:
27.f/epd《2.5;
28.其中,f为所述光学成像系统的有效焦距,epd为所述光学成像系统的入瞳直径。
29.在一些实施例中,所述光学成像系统满足以下条件式:
30.2.4《v4/v5《3.0;
31.其中,v4为所述第四透镜的色散系数,v5为所述第五透镜的色散系数。
32.本技术的一实施例提供了一种取像模组,包括:
33.上述的光学成像系统;及
34.感光元件,所述感光元件设置在所述光学成像系统的像侧。
35.本技术的一实施例提供了一种电子装置,包括:
36.壳体;及
37.上述的取像模组,所述取像模组安装在所述壳体上。
附图说明
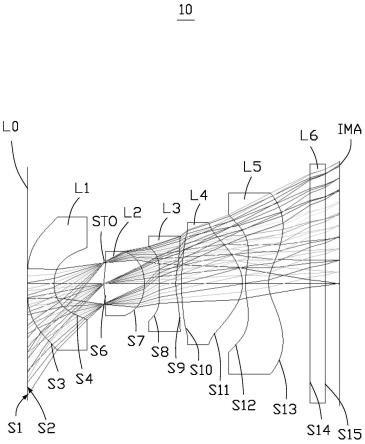
38.图1是本技术第一实施例的光学成像系统的结构图。
39.图2是本技术第一实施例的光学成像系统的场曲及畸变曲线图。
40.图3是本技术第二实施例的光学成像系统的结构图。
41.图4是本技术第二实施例的光学成像系统的场曲及畸变曲线图。
42.图5是本技术第三实施例的光学成像系统的结构图。
43.图6是本技术第三实施例的光学成像系统的场曲及畸变曲线图。
44.图7是本技术第四实施例的光学成像系统的结构图。
45.图8是本技术第四实施例的光学成像系统的场曲及畸变曲线图。
46.图9是本技术实施例的取像模组的结构示意图。
47.图10是本技术实施例的电子装置的结构示意图。
48.主要元件符号说明
49.取像模组
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
50.光学成像系统
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
51.第一透镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l1
52.第二透镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l2
53.第三透镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l3
54.第四透镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l4
55.第五透镜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l5
56.红外滤光片
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l6
57.光阑
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
sto
58.物侧面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
s3、s6、s8、s10、s12、s14
59.像侧面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
s4、s7、s9、s11、s13、s15
60.成像面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
ima
61.感光元件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
62.电子装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200
63.壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
210
具体实施方式
64.下面详细描述本技术的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本技术,而不能理解为对本技术的限制。
65.请参见图1,本技术的实施例提出了一种光学成像系统10,从物侧至像侧依次包括具有屈折力的第一透镜l1、具有负屈折力的第二透镜l2、具有正屈折力的第三透镜l3、具有负屈折力的第四透镜l4及具有正屈折力的第五透镜l5。
66.第一透镜l1具有物侧面s3及像侧面s4;第二透镜l2具有物侧面s6及像侧面s7;第三透镜l3具有物侧面s8及像侧面s9;第四透镜l4具有物侧面s10及像侧面s11;第四透镜l5具有物侧面s12及像侧面s13。在图1中,为了设计需要,还需要设置一虚拟面l0,虚拟面l0具有物侧面s1和像侧面s2。
67.其中,虚拟面l0的像侧面s2与第一透镜l1的物侧面s3相接。第一透镜l1的像侧面s4在近光轴处为凹面;第三透镜l3的像侧面s9在近光轴处为凹面;第四透镜l4的物侧面 s10在近光轴处为凹面,第四透镜l4的像侧面s11在近光轴处为凸面;第五透镜l5的像侧面s13在近光轴处为凹面,第五透镜l5的像侧面s13在近边缘处为凸面,第五透镜l5的物侧面s12和像侧面s13中的至少一者为非球面。
68.在一些实施例中,光学成像系统10满足以下条件式:
69.95
゜
/mm《fov/tl5《105/mm,1mm-1
《fno/tl4《1.5mm-1
;
70.其中,fov为光学成像系统10的最大视场角,tl5为第五透镜l5的物侧面s12至成像面ima在光轴方向的距离,fno为光学成像系统10的光圈数,tl4为第四透镜l4的物侧面s10至成像面ima在光轴方向的距离。
71.在满足上述条件时,可使入射光线在进入光学成像系统10时其折射角度变化较为和缓,可有效避免光学成像系统10像差的过度增生,并可降低杂散光的形成,成像质量较好,且具有较大焦距,可用于清楚拍摄远景,又具有大视场角,可清楚拍摄近景。
72.在一些实施例中,光学成像系统10满足以下关系式:
73.1.5《imgh/f《2.0;
74.其中,imgh为光学成像系统10的最大视场角所对应的像高的一半,f为光学成像系统 10的焦距。如此,有助于提升光学成像系统10的望远特性。
75.在一些实施例中,光学成像系统10满足以下关系式:
76.0.75《(v2 v3 v5)/(v1 v4)《1;
77.其中,v1为第一透镜l1的色散系数,v2为第二透镜l2的色散系数,v3为第三透镜 l3的色散系数,v4为第四透镜l4的色散系数,v5为第五透镜l5的色散系数。如此,可在色差修正与像散修正之间取得良好平衡。
78.在一些实施例中,光学成像系统10满足以下关系式:
79.3《tl1/f《3.5;
80.其中,tl1为第一透镜l1的物侧面s3至成像面ima在光轴方向的距离,f为光学成像系统10的焦距。如此,可缩短光学成像系统10的总长度,同时令光学成像系统10具有望远特性。
81.在一些实施例中,光学成像系统10满足以下条件式:
82.f/epd《2.5;
83.其中,f为光学成像系统10的焦距,epd为光学成像系统10的入瞳直径。如此,f与 epd的比值能够得到合理配置,以控制光学成像系统10的进光量和光圈数,使光学成像系统 10具有大光圈的效果以及较远的景深范围,进而使光学成像系统10对无限远物体能够清晰成像的同时,对近处的物体也能够有优良的解像力,提高光学成像系统10的成像品质。
84.在一些实施例中,光学成像系统10满足以下条件式:
85.2.4《v4/v5《3.0;
86.其中,v4为第四透镜l4的色散系数,v5为第五透镜l5的色散系数。如此,有助于修正色差。
87.在一些实施例中,光学成像系统10还包括光阑sto。光阑sto可以设置在任意一个透镜的表面上,或设置在第一透镜l1之前,或设置在任意两个透镜之间,或设置在第四透镜 l4的像侧面s9。例如,在图1中,光阑sto设置在第二透镜l2的物侧面s6上,该光阑的种类可为耀光光阑(glare stop)或视场光阑(field stop)等,用以减少杂散光,有助于提升影像品质。
88.在一些实施例中,光学成像系统10还包括红外滤光片l6,红外滤光片l6具有物侧面 s14及像侧面s15。红外滤光片l6设置在第五透镜l5的像侧,以滤除例如可见光等其他波段的光线,而仅让红外光通过,以使光学成像系统10能够在昏暗的环境及其他特殊的应用场景下也能成像。
89.上述的光学成像系统10通过紧凑的空间排布和合理的屈折力分配,实现了轻薄化及较短的总长,有利于小型化电子产品的应用;在满足上述条件时,可使入射光线在进入光学成像系统10时其折射角度变化较为和缓,可有效避免光学成像系统像差10的过度增生,
并可降低杂散光的形成,成像质量较好,且具有较大焦距,可用于清楚拍摄远景,又具有大视场角,可清楚拍摄近景。
90.第一实施例
91.请参见图1,本实施例中的光学成像系统10中,从物侧至像侧包括具有屈折力的第一透镜l1、光阑sto、具有负屈折力的第二透镜l2、具有正屈折力的第三透镜l3、具有负屈折力的第四透镜l4、具有正屈折力的第五透镜l5及红外滤光片l6。
92.第一透镜l1的物侧面s3在近光轴处为凸面,第一透镜l1的像侧面s4在近光轴处为凹面。
93.第二透镜l2的物侧面s6在近光轴处为凸面,第二透镜l2的像侧面s7在近光轴处为凸面。
94.第三透镜l3的物侧面s8在近光轴处为凹面,第三透镜l3的像侧面s9在近光轴处为凹面。
95.第四透镜l4的物侧面s10在近光轴处为凹面,第四透镜l4的像侧面s11在近光轴处为凸面。
96.第五透镜l5的物侧面s12在近光轴处为凸面,第五透镜l5的像侧面s13在近光轴处为凹面。
97.当光学成像系统10用于成像时,被摄物发出或反射的光线从物侧方向进入光学成像系统 10,并依次穿过第一透镜l1、光阑sto、第二透镜l2、第三透镜l3、第四透镜l4、第五透镜l5及红外滤光片l6,最终汇聚到成像面ima上。
98.表格1示出了本实施例的光学成像系统的特性,焦距、折射率及阿贝数的参考波长为 558nm,y半径、厚度和焦距的单位均为毫米(mm)。
99.表格1
[0100][0101]
[0102]
其中,f为光学成像系统10的焦距,fno为光学成像系统10的光圈大小,fov为光学成像系统10的最大视场角。
[0103]
表2
[0104][0105]
需要说明的是,光学成像系统10的透镜的表面可能是非球面,对于这些非球面的表面,非球面表面的非球面方程为:
[0106][0107]
其中,z表示透镜面中与z轴平行的高度,r表示从顶点起的径向距离,c表示顶点处表面的曲率,k表示圆锥常数,a4、a6、a8、a10、a12分别表示4阶、6阶、8阶、10阶、 12阶对应阶次的非球面系数。在本技术实施例中,第一透镜至第五透镜的物侧面和像侧面均为非球面,各非球面的表面对应的圆锥常数k和非球面系数如表格2所示。
[0108]
图2示出了本技术实施例的光学成像系统10的场曲和畸变曲线图,场曲和畸变的参考波长为455nm,场曲曲线表示子午像面弯曲和弧矢像面弯曲,其中弧失场曲和子午场曲的最大值均小于0.3mm,得到了较好的补偿;畸变曲线表示不同视场角对应的畸变大小值,其中最大畸变小于20%,畸变也得到了较好的校正。
[0109]
第二实施例
[0110]
请参见图3,本实施例中的光学成像系统10中,从物侧至像侧包括具有屈折力的第一透镜l1、光阑sto、具有负屈折力的第二透镜l2、具有正屈折力的第三透镜l3、具有负屈折力的第四透镜l4、具有正屈折力的第五透镜l5及红外滤光片l6。
[0111]
第一透镜l1的物侧面s3在近光轴处为凸面,第一透镜l1的像侧面s4在近光轴处为凹面。
[0112]
第二透镜l2的物侧面s6在近光轴处为凸面,第二透镜l2的像侧面s7在近光轴处为凸面。
[0113]
第三透镜l3的物侧面s8在近光轴处为凹面,第三透镜l3的像侧面s9在近光轴处为凹面。
[0114]
第四透镜l4的物侧面s10在近光轴处为凹面,第四透镜l4的像侧面s11在近光轴处为凸面。
[0115]
第五透镜l5的物侧面s12在近光轴处为凸面,第五透镜l5的像侧面s13在近光轴处为凹面。
[0116]
当光学成像系统10用于成像时,被摄物发出或反射的光线从物侧方向进入光学成像系统 10,并依次穿过第一透镜l1、光阑sto、第二透镜l2、第三透镜l3、第四透镜l4、第五透镜l5及红外滤光片l6,最终汇聚到成像面ima上。
[0117]
表格3示出了本实施例的光学成像系统的特性,焦距、折射率及阿贝数的参考波长为 558nm,y半径、厚度和焦距的单位均为毫米(mm)。
[0118]
表格3
[0119][0120][0121]
其中,f为光学成像系统10的有效焦距,fno为光学成像系统10的光圈大小,fov为光学成像系统10的最大视场角。
[0122]
表4
[0123][0124]
图4示出了本技术实施例的光学成像系统10的场曲和畸变曲线图,场曲和畸变的参考波长为455nm,场曲曲线表示子午像面弯曲和弧矢像面弯曲,其中弧失场曲和子午场曲的最大值均小于0.3mm,得到了较好的补偿;畸变曲线表示不同视场角对应的畸变大小值,其中最大畸变小于20%,畸变也得到了较好的校正。
[0125]
第三实施例
[0126]
请参阅图5,本实施例中的光学成像系统10中,从物侧至像侧包括具有屈折力的第一透镜l1、光阑sto、具有负屈折力的第二透镜l2、具有正屈折力的第三透镜l3、具有负屈折力的第四透镜l4、具有正屈折力的第五透镜l5及红外滤光片l6。
[0127]
第一透镜l1的物侧面s3在近光轴处为凸面,第一透镜l1的像侧面s4在近光轴处为凹面。
[0128]
第二透镜l2的物侧面s6在近光轴处为凸面,第二透镜l2的像侧面s7在近光轴处为凸面。
[0129]
第三透镜l3的物侧面s8在近光轴处为凹面,第三透镜l3的像侧面s9在近光轴处为凹面。
[0130]
第四透镜l4的物侧面s10在近光轴处为凹面,第四透镜l4的像侧面s11在近光轴处为凸面。
[0131]
第五透镜l5的物侧面s12在近光轴处为凸面,第五透镜l5的像侧面s13在近光轴处为凹面。
[0132]
当光学成像系统10用于成像时,被摄物发出或反射的光线从物侧方向进入光学成像系统 10,并依次穿过第一透镜l1、光阑sto、第二透镜l2、第三透镜l3、第四透镜l4、第五透镜l5及红外滤光片l6,最终汇聚到成像面ima上。
[0133]
表格5示出了本实施例的光学成像系统的特性,焦距、折射率及阿贝数的参考波长为 558nm,y半径、厚度和焦距的单位均为毫米(mm)。
[0134]
表格5
[0135][0136][0137]
其中,f为光学成像系统10的焦距,fno为光学成像系统10的光圈大小,fov为光学成像系统10的最大视场角。
[0138]
表6
[0139][0140]
图6示出了本技术实施例的光学成像系统10的场曲和畸变曲线图,场曲和畸变的参考波长为455nm,场曲曲线表示子午像面弯曲和弧矢像面弯曲,其中弧失场曲和子午场曲的最大值均小于0.3mm,得到了较好的补偿;畸变曲线表示不同视场角对应的畸变大小值,其中最大畸变小于20%,畸变也得到了较好的校正。
[0141]
第四实施例
[0142]
请参阅图7,本实施例中的光学成像系统10中,从物侧至像侧包括具有屈折力的第一透镜l1、光阑sto、具有负屈折力的第二透镜l2、具有正屈折力的第三透镜l3、具有负屈折力的第四透镜l4、具有正屈折力的第五透镜l5及红外滤光片l6。
[0143]
第一透镜l1的物侧面s3在近光轴处为凸面,第一透镜l1的像侧面s4在近光轴处为凹面。
[0144]
第二透镜l2的物侧面s6在近光轴处为凸面,第二透镜l2的像侧面s7在近光轴处为凸面。
[0145]
第三透镜l3的物侧面s8在近光轴处为凹面,第三透镜l3的像侧面s9在近光轴处为凹面。
[0146]
第四透镜l4的物侧面s10在近光轴处为凹面,第四透镜l4的像侧面s11在近光轴处为凸面。
[0147]
第五透镜l5的物侧面s12在近光轴处为凸面,第五透镜l5的像侧面s13在近光轴处为凹面。
[0148]
当光学成像系统10用于成像时,被摄物发出或反射的光线从物侧方向进入光学成像系统 10,并依次穿过第一透镜l1、光阑sto、第二透镜l2、第三透镜l3、第四透镜l4、第五透镜l5及红外滤光片l6,最终汇聚到成像面ima上。
[0149]
表格7示出了本实施例的光学成像系统的特性,焦距、折射率及阿贝数的参考波长为 558nm,y半径、厚度和焦距的单位均为毫米(mm)。
[0150]
表格7
[0151][0152]
其中,f为光学成像系统10的有效焦距,fno为光学成像系统10的光圈大小,fov为光学成像系统10的最大视场角。
[0153]
表8
[0154][0155][0156]
图8示出了本技术实施例的光学成像系统10的场曲和畸变曲线图,场曲和畸变的参考波长为455nm,场曲曲线表示子午像面弯曲和弧矢像面弯曲,其中弧失场曲和子午场曲的最大值均小于0.3mm,得到了较好的补偿;畸变曲线表示不同视场角对应的畸变大小值,其中最大畸变小于20%,畸变也得到了较好的校正。
[0157]
表格9示出了第一实施例至第四实施例的光学成像系统中fov/tl5、fno/tl4、imgh/f、 (v2 v3 v5)/(v1 v4)、tl1/f、f/epd和v4/v5的值。
[0158]
表格9
[0159]
表达式fov/tl5fno/tl4imgh/f(v2 v3 v5)/(v1 v4)第一实施例98.381.1431.6840.866第二实施例101.5821.1401.7030.764第三实施例98.6691.1001.8300.902
第四实施例99.3671.1001.6860.902表达式tl1/ff/epdv4/v5 第一实施例3.4022.42.732 第二实施例3.2312.42.575 第三实施例3.4052.3662.483 第四实施例3.4262.3662.483 [0160]
请参见图9,本技术实施例的光学成像系统10可应用于本技术实施例的取像模组100。取像模组100包括感光元件20及上述任一实施例的光学成像系统10。感光元件20设置在光学成像系统10的像侧。
[0161]
感光元件20可以采用互补金属氧化物半导体(cmos,complementary metal oxidesemiconductor)影像感测器或者电荷耦合元件(ccd,charge-coupled device)。
[0162]
请参见图10,本技术实施例的取像模组100可应用于本技术实施例的电子装置200。电子装置200包括壳体210及取像模组100,取像模组100安装在壳体210上。
[0163]
本技术实施例的电子装置200包括但不限于为行车记录仪、智能手机、平板电脑、笔记本电脑、电子书籍阅读器、便携多媒体播放器(pmp)、便携电话机、视频电话机、数码静物相机、移动医疗装置、可穿戴式设备等支持成像的电子装置。
[0164]
最后应说明的是,以上实施例仅用以说明本技术的技术方案而非限制,尽管参照较佳实施例对本技术进行了详细说明,本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或等同替换,而不脱离本技术技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。