1.本技术总体上涉及牙齿三维数字模型的融合方法。
背景技术:
2.随着计算机科学的不断发展,牙科专业人员越来越多地借助计算机技术来提高牙科诊疗的效率。在借助计算机的牙科诊疗中,常用到牙齿的三维数字模型。
3.目前,通过对患者进行口内扫描,或者通过对患者牙齿的印模或实体模型进行扫描,能够获得精度较高的患者牙冠的三维数字模型,但是这种方法无法获得患者牙根的信息。
4.利用断层扫描技术(computed tomography,简称ct)可以获得患者牙齿整体的三维数字模型(包括牙冠和牙根),但其精度不高。
5.一些诊疗项目(例如,牙齿正畸治疗)虽然需要用到完整牙齿的三维数字模型,但仅对牙冠部分有较高的精度要求,对牙根部分,只要求掌握其大致形体和位置即可。因此,出现了将高精度牙冠的三维数字模型和较低精度的牙根的三维数字模型进行融合,获得完整牙齿的三维数字模型的方案。
6.为了便于描述,以下将精度较高的表示牙冠的数字数据集称为目标牙冠,将精度较低的表示整体牙齿的数字数据集称为参考牙齿。
7.当前,主要有两种融合方法。第一种是直接拼接法,它是先将参考牙齿与目标牙冠进行配准,然后,基于配准的结果人工切除表示参考牙齿的牙冠部分得到参考牙齿的牙根部分,最后,将目标牙冠和参考牙齿的牙根部分进行拼接得到融合的结果。然而,该方法存在以下不足:其一,牙冠和牙根之间的过渡与真实情况差异较大;其二,人工切除牙冠较为耗时,并且结果一致性得不到保证。
8.第二种是网格变形法,它是先将参考牙齿与目标牙冠进行配准,然后,以目标牙冠作为控制点,对参考牙齿的三角网格数据进行非刚性网格形变,得到融合的结果。然而,该方法存在以下不足:由于牙冠部分是基于参考牙冠根据目标牙冠进行形变得到,其精度得不到保证。
9.鉴于以上,有必要提供一种新的产生牙齿三维数字模型的方法。
技术实现要素:
10.本技术的一方面提供了一种计算机执行的牙齿三维数字模型的融合方法,包括:获取表示第一牙齿牙冠的第一三维数字模型、表示所述第一牙齿整体的第二三维数字模型以及第一分割方案,所述第一分割方案将所述第二三维数字模型分割成分别与牙冠与牙根对应的第一部分和第二部分;将所述第一三维数字模型和所述第二三维数字模型的第一部分进行点云配准;基于所述点云配准的结果,计算出所述第二三维数字模型上与所述第一三维数字模型的边缘上的点最近的点的集合,并基于所述最近的点的集合删除所述第二三维数字模型与所述第一三维数字模型相对应的部分,得到所述第二三维数字模型的第三部
分;将所述第一三维数字模型和所述第二三维数字模型的第三部分进行曲面缝合,得到融合的三维数字模型;以及对所述融合的三维数字模型的缝合区域进行三角网格形变。
11.在一些实施方式中,采样稀疏迭代最近点方法进行所述点云配准。
12.在一些实施方式中,所述的基于计算机的牙齿三维数字模型的融合方法还可以包括:通过质心偏移,使所述第一三维数字模型和所述第二三维数字模型的第一部分的重心重合,所述点云配准是在所述质心偏移的基础上进行。
13.在一些实施方式中,所述的基于计算机的牙齿三维数字模型的融合方法还包括:删除所述第二三维数字模型的所述最近的点的集合的一环邻域,并基于删除所述一环邻域后的连通域数量以及这些连通域的面片数量,删除所述第二三维数字模型与所述第一三维数字模型相对应的部分。
14.在一些实施方式中,所述的基于计算机的牙齿三维数字模型的融合方法还可以包括:计算所述第一三维数字模型的边缘和所述第二数字模型的第三部分的边缘之间的最近点对集合,在所述曲面缝合中,基于所述最近点对集合进行子曲面划分。
15.在一些实施方式中,所述的基于计算机的牙齿三维数字模型的融合方法还可以包括:对由四个顶点构成的子曲面进行三角形剖分,进行所述三角形剖分时,采用最小内角较大的剖分方案。
16.在一些实施方式中,所述的基于计算机的牙齿三维数字模型的融合方法还可以包括:对由大于四个顶点构成的子曲面进行剖分,先剖分出一个由四个顶点构成的子曲面,并采用最小内角较大的剖分方案对其进行三角剖分,此时,所述子曲面剩余的部分在一个边缘上剩余第一顶点,在另一个边缘上剩余多个顶点,按所述多个顶点中每两个相邻的顶点与所述第一顶点构成一个三角形的方式对所述剩余部分进行三角形剖分。
17.在一些实施方式中,采用laplace-beltrami调和形变算法进行所述三角形网格形变。
18.在一些实施方式中,所述的基于计算机的牙齿三维数字模型的融合方法还可以包括:基于所述第二三维数字模型的第三部分的边缘线,基于面片数量计算得到覆盖所述缝合区域的w环邻域,以及对所述w环邻域进行所述三角网格形变。
19.在一些实施方式中,所述的基于计算机的牙齿三维数字模型的融合方法还可以包括:在删除所述第二三维数字模型与所述第一三维数字模型相对应的部分之前,对所述第二三维数字模型进行平滑处理,所述平滑处理包括正向平滑和逆向平滑。
20.在一些实施方式中,所述的基于计算机的牙齿三维数字模型的融合方法还可以包括:在删除所述第二三维数字模型与所述第一三维数字模型相对应的部分之前,对所述第二三维数字模型进行简化处理,所述简化处理是基于所述第一三维数字模型的面片数量的自适应简化处理。
21.在一些实施方式中,所述第一三维数字模型是通过以下方式之一获得:口内扫描、扫描牙齿印模或实体模型,所述第二三维数字模型是通过计算机断层扫描技术获得。
附图说明
22.以下将结合附图及其详细描述对本技术的上述及其他特征作进一步说明。应当理解的是,这些附图仅示出了根据本技术的若干示例性的实施方式,因此不应被视为是对本
申请保护范围的限制。除非特别指出,附图不必是成比例的,并且其中类似的标号表示类似的部件。
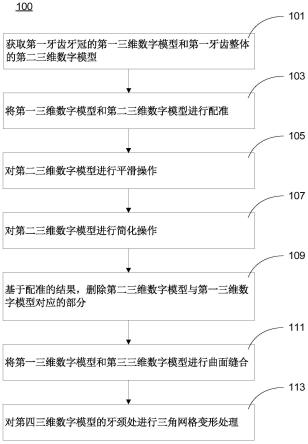
23.图1为本技术一个实施例中计算机实施的牙齿三维数字模型的融合方法的示意性流程图;
24.图2展示了本技术一个实施例中通过口内扫描获得的第一牙颌的三维数字模型;
25.图3展示了本技术一个实施例中通过计算机断层扫描获得的第一牙颌的三维数字模型;
26.图4a示意性地展示了一个例子中的一种三角形剖分方案;
27.图4b示意性地展示了图4a所示例子的另一种三角形剖分方案;以及
28.图5示意性地展示了一个例子中的三角形剖分方案。
具体实施方式
29.以下的详细描述引用了构成本说明书一部分的附图。说明书和附图所提及的示意性实施方式仅仅是出于说明性之目的,并非意图限制本技术的保护范围。在本技术的启示下,本领域技术人员能够理解,可以采用许多其他实施方式,并且可以对所描述实施方式做出各种改变,而不背离本技术的主旨和保护范围。应当理解的是,在此说明并图示的本技术的各个方面可以按照很多不同的配置来布置、替换、组合、分离和设计,这些不同配置都在本技术的保护范围之内。
30.本技术的一方面提供了一种牙齿三维数字模型的融合方法,用于将表示牙冠的第一三维数字模型和表示整体牙齿的第二三维数字模型的牙根部分进行融合,获得融合的表示整体牙齿的三维数字模型。其中,所述第一三维数字模型是以第一技术手段获得;所述第二三维数字模型是以不同于所述第一技术手段的第二技术手段获得。在一个例子中,与所述第二三维数字模型的牙冠部分相比,所述第一三维数字模型与真实牙冠的吻合度更高。
31.在一个实施例中,所述第一技术手段可以是口内扫描,或者扫描患者牙齿印模或实体模型。
32.在一个实施例中,所述第二技术手段可以是断层扫描,例如,锥束计算机断层扫描(cone beam computed tomography,简称cbct)。
33.请参图1,为本技术一个实施例中的产生牙齿三维数字模型的方法100的示意性流程图。
34.在101中,获取第一牙齿牙冠的第一三维数字模型和第一牙齿整体牙齿的第二三维数字模型。
35.获取牙冠的数字三维模型的方法有多种。在一个实施例中,可以对患者进行口内扫描,获得患者上颌和/或下颌所有牙冠的三维数字模型。在又一实施例中,可以扫描患者牙颌的实体模型,例如石膏模型,获得所述牙颌所有牙冠的三维数字模型。在又一实施例中,可以扫描患者牙颌的印模,获得所述牙颌所有牙冠的三维数字模型。将扫描获得的牙颌的三维数字模型进行分割即可获得各牙冠的三维数字模型。扫描获得牙颌的三维数字模型以及对其进行分割的技术已为业界所习知,此处不再进行详述。
36.请参图2,展示了本技术一个例子中通过口内扫描获得的第一牙颌的三维数字模型。
37.在一个实施例中,可以利用计算机断层扫描技术获取整体牙齿的三维数字模型。利用计算机断层扫描技术所获得的原始数据包括颌骨与牙齿的信息,利用已有的技术能够对计算机断层扫描获得的原始数据进行处理,以剔除颌骨的信息,提取牙齿的信息,并将牙冠和牙根进行分割,后续将该分割称为第一分割方案。
38.请参图3,展示了本技术一个例子中通过cbct获得的第一牙颌的三维数字模型。
39.在103中,将所述第一三维数字模型和所述第二三维数字模型进行配准。
40.先将所述第一三维数字模型和第二三维数字模型进行配准,然后,基于配准的结果将所述第二三维数字模型与所述第一数字模型相对应的部分删除,最后将所述第一三维数字模型与所述第二三维数字模型的剩余部分进行融合。
41.为了便于说明,以下将根据第一分割方案对所述第二三维数字模型进行分割而获得的牙冠部分称为第一部分。
42.在一个实施例中,可以采用点云配准的方法将所述第一三维数字模型和所述第二三维数字模型的第一部分进行配准。
43.在一个实施例中,基于单颗牙进行配准,可能误差较大,因此,为保证配准精度,可基于多颗牙进行配准,例如,基于整个牙列(上颌牙列或下颌牙列)进行配准。
44.在一个实施例中,可以采用以下方法进行点云配准。
45.在一个实施例中,所述第一三维数字模型可以直接作为融合后的牙齿整体的三维数字模型的牙冠部分,若所述第二三维数字模型的三角网格密度(即单位面积三角网格数量)显著高于所述第一三维数字模型,为了提升配准的计算效率,提高收敛速度,可以对所述第二三维数字模型的牙冠部分进行点云降采样。
46.在一个实施例中,可以采样以下方法对所述第二三维数字模型进行点云降采样。
47.首先,建立一个包围所述第二三维数字模型第一部分的矩形体包围盒,然后,将该包围盒以所述第一三维数字模型的三角网格的平均边长l1进行切分,得到多个边长为l1的子立方体,在每一个子立方体内保留第一个搜索到的点,遍历所有子立方体后完成第二三维数字模型第一部分的点云降采样。
48.在完成所述第二三维数字模型第一部分的点云降采样之后,在进行点云配准之前,可以通过质心偏移的方式将所述第一三维数字模型和第二三维数字模型第一部分进行大致对准,以提升后续点云配准的精度和效率。在一个实施例中,可以先分别计算所述第一三维数字模型和第二三维数字模型第一部分的重心(即平均坐标),然后,可以将两者之一的重心偏移到另一个的重心,完成两者的大致对准。
49.在一个实施例中,可以采用稀疏迭代最近点方法(sparse iterative closest point,简称sicp)进行点云配准。在一个实施例中,可以以所述第一三维数字模型的点云为基准进行点云配准,更新所述第二三维数字模型第一部分的点云的位置。
50.在一个实施例中,sicp配准方法的条件可以如此设置:若配准次数小于k1,此时,计算所述第二三维数字模型第一部分的点云中每个点与所述第一三维数字模型的点云中最近点的距离d1,若d1>k2*l1,则认为该点异常并删除,完成所述第二三维数字模型第一部分的点云的一次更新;重复上述操作,直至配准次数大于等于k1,此时完成配准。
51.在一个实施例中,可以如此设置各参数:将k1设为3;将k2的初始值设为6,每迭代一次,k2的值递减2;将sicp配准方法的范数p的变化范围设为0.4~2;将迭代次数n的变化范
围设为30~100。可以理解,以上参数可以根据具体情况和需求进行调整。
52.可以理解,在基于多颗牙齿进行配准的实施例中,可以将多颗牙齿的三维数字模型作为一个整体进行以上的操作,例如,可以基于图2所示的三维数字模型与图3所述的三维数字模型进行配准。
53.所述第一三维数字模型所表示的牙冠的边缘是牙龈线,而所述第二三维数字模型第一部分是基于计算机断层扫描的平面分割获得,因此,两者的边缘可能存在较大差异。由于sicp配准方法不考虑差异较大的点,在这种情况下,它能够达到较高的配准精度。
54.在105中,对第二三维数字模型进行平滑操作。
55.利用计算机断层扫描获得的所述第二三维数字模型可能存在一些瑕疵,因此,可以在融合之前对其进行平滑操作,以消除这些瑕疵。另一方面,平滑操作能够使其更逼近牙齿的真实形态。
56.在一个实施例中,可以采用正向平滑和逆向平滑的组合对所述第二三维数字模型进行平滑操作。正向平滑和逆向平滑的组合可以在一定程度上防止平滑后的三维数字模型内缩或膨胀。
57.在一个实施例中,可以采用拉普拉斯平滑算子进行平滑。以下方程式(1)表达了基于拉普拉斯平滑算子的正向平滑。
[0058]vip
=vi λ
p
d(v)
ꢀꢀꢀ
方程式(1)
[0059]
其中,vi代表当前顶点,λ
p
代表正向平滑的步长参数。在一个实施例中,λ
p
的取值范围可以为0.5~0.7,可以理解,该取值范围可以根据具体的情况进行调整。
[0060][0061]
其中,ni为当前顶点vi的一环邻域,n为一环邻域内顶点的个数,迭代正向平滑k3次。在一个实施例中,k3的取值范围可以是15~25。
[0062]
以下方程式(3)表达了基于拉普拉斯平滑算子的逆向平滑。
[0063]vir
=v
i-λrd(v)
ꢀꢀꢀ
方程式(3)
[0064]
其中,λr代表逆向平滑的步长参数,迭代逆向平滑k3次。在一个实施例中,λr的取值范围可以为0.25~0.35,可以理解,该取值范围可以根据具体的情况进行调整。
[0065]
经过大量实验,采用正向平滑和逆向平滑组合的方法能够在满足平滑效果的基础上保持原有网格的大小,将平均精度损失控制在0.03mm之内。对于口腔正畸行业,排牙分步的有效移动步长大致为0.2mm,该平滑方法的精度损失远小于移动步长,因此,能够很好地满足该应用。
[0066]
在本技术的启示下,可以理解,除了拉普拉斯平滑算子,还可以基于任何其他适用于曲面平滑的算法对所述第二三维数字模型进行平滑操作,例如,面片法向均值滤波算法,或基于加权均值滤波算法等。
[0067]
在107中,对经平滑的第二三维数字模型进行简化。
[0068]
在一个实施例中,所述第二三维数字模型的面片密度远高于所述第一三维数字模型。为了使融合后的三维数字模型拓扑自然,可以对所述经平滑的第二三维数字模型进行简化。
[0069]
在一个实施例中,对所述第二三维数字模型的简化可以是基于所述第一三维数字
模型的面片数量的自适应简化。
[0070]
在一个实施例中,自适应简化方法可以包括以下操作,它根据牙冠大小的分类采用不同的简化方法。
[0071]
首先,计算所述第二三维数字模型和所述第一三维数字模型的包围盒体积比值ratio1,并基于ratio1对所述牙冠进行分类,若ratio1>k4,那么,将该牙冠分类为“小牙冠”,否则将其分类为“正常牙冠”。
[0072]
如果所述牙冠是“正常牙冠”,那么,所述第二三维数字模型的面片数量等于所述第一三维数字模型的面片数量与atio1的乘积,如果所述牙冠是“小牙冠”,那么进行迭代简化,简化率可以设为80%。每次简化完,计算面片的平均边长l2,如果l
2-l1<minl,则停止简化,否则继续简化。
[0073]
在一个实施例中,k4可以设为5,minl可以设为0.2mm。
[0074]
根据实验对比,相比于设定固定的目标面片数量的方式,自适应简化能够使融合后牙冠和牙根的面片形态一致性更好,拓扑更自然。
[0075]
在109中,基于所述配准的结果,删除所述经平滑和简化的第二三维数字模型与所述第一三维数字模型相对应的部分(即牙冠部分)。
[0076]
在一个实施例中,可以基于以下方法进行删除。
[0077]
首先,基于所述配准的结果计算所述经平滑和简化的第二三维数字模型上与所述第一三维数字模型的边缘上的点最近的点的集合,并将这些最近的点的一环邻域面片(包括最近点两侧的面片)删除。
[0078]
接着,计算删除所述一环邻域后的第二三维数字模型上的连通域的数量。若连通域数量大于1,那么,追踪所述牙冠部分的连通域,并计算其面片数量与总面片数量的比值ratio2,若ratio2>r1且所述牙冠部分连通域面片数量大于k5,那么,说明所述牙冠部分被成功分割,删除所述牙冠部分的连通域,过程结束。在一个实施例中,r1可以取值0.1,k5可以在300~400的范围内取值,可以理解,k5的取值范围可以根据经平滑和简化后的第二三维数字模型的精度调整。若ratio2或所述牙冠部分连通域的面片数量不满足设定条件,或者连通域的数量小于等于1,那么,计算牙根部分连通域的面片数量与所述第二三维数字模型的总面片数量的比值ratio3,同时统计根据最近点删除一环邻域面片的次数m。若ratio3>r2(ratio3越小,说明删除的面片越多,r2相当于剩余面片数量的警戒线)且m<k6,则在现有三角网格的基础上更新最近点集合,继续上述操作。在一个实施例中,r2可以取值0.5,k6可以取值10。若ratio3<r2或m>k6(满足这两个条件的任何之一,说明删除面片数量过多,继续删除可能严重影响牙根形态特征,故一旦触发该条件,就停止删除操作),则删除牙冠部分的连通域,过程结束。
[0079]
将所述经简化和平滑的第二三维数字模型的所述牙冠部分删除后得到表示牙根的第三三维数字模型。
[0080]
在111中,将所述第三三维数字模型与所述第一三维数字模型的边缘进行曲面缝合。
[0081]
在一个实施例中,为了保证后续曲面缝合的平滑,可以在曲面缝合前对所述第三三维数字模型的边缘进行平滑处理。在一个实施例中,可以采用拉普拉斯平滑方法。在一个实施例中,其具体操作如下。
[0082]
获取第三三维数字模型边缘的点集p
re
,计算p
re
中顶点vi与相邻顶点v
i 1
和v
i-1
的夹角α,若则对vi作拉普拉斯平滑。在一个实施例中,拉普拉斯平滑可以下面方程式(4)表达。
[0083][0084]
其中,n=3,
[0085]
得到平滑后的顶点集p
re’,再次计算p
re’中各顶点与相邻顶点的夹角,若则对该顶点进行拉普拉斯平滑,以此循环,直至所有顶点均不满足若的条件。
[0086]
接着,将所述第一三维数字模型和第三三维数字模型边缘的顶点进行排序。在一个实施例中,可以先找出所述第一三维数字模型的边缘的点集pc与p
re’之间距离最小的一对点{pci,p
re
′
j},然后,以pci为起点,沿逆时针方向重新将pc排序,以p
re’j为起点,沿逆时针方向重新将p
re’排序。
[0087]
然后,可以基于排序后的点集划分子曲面。在一个实施例中,可以采用如下方法进行子曲面划分。
[0088]
先计算pc与p
re’中点的数量,数量少的定义为p
short
,数量多的定义为p
long
。
[0089]
接着,计算p
short
和p
long
的最近点对,其中,p
short
和p
long
的第一个点构成一个最近点对,p
short
和p
long
的最后一个点构成一个最近点对。
[0090]
然后,计算每一个最近点对p
long
中点的索引位置index与前一最近点对p
long
中点的索引位置index’的差值d,其中,不计算第一个最近点对和最后一个最近点对之间p
long
中点的索引位置差值。
[0091]
若d>sp
long
/2,则当前最近点对p
long
中点的索引位置替换为index’,其中,sp
long
为p
long
中点的数量。也就是说,由当前最近点对中的p
shor
t点和前一最近点对构成一个三角形,由后一最近点对中的p
short
点、当前最近点对中的p
short
点、当前最近点对中的p
long
点和前一最近点对中的p
long
点以及它们之间的p
long
点构成新的子曲面。
[0092]
每两个相邻的最近点对(4个点)以及它们之间的p
long
中的点构成一个子曲面,其中,第一个最近点对和最后一个最近点对构成一个子曲面。若相邻的子曲面之间存在相交,则先删除相交的线所对应的最近点对{pi
short
,pj
long
},接着,找到pi
short
的前一个点pil
short
和后一个点pi2
short
,并找到这两个点所对应的pj1
long
和pj2
long
。然后,计算pi
short
到pj1
long
和pj2
long
之间所有点的距离,取最小值所对应的点pj0
long
作为新的pj
long
。重复上述操作,直到所有子曲面之间不存在相交的情况。
[0093]
接下来对子曲面进行三角剖分。在一个实施例中,可以采用以下方法基于三角形内角对子曲面进行剖分。
[0094]
首先,计算每一子曲面中属于p
long
的顶点的数量np。
[0095]
若np=1,则说明该子曲面为三角形,无需剖分。
[0096]
若np=2,则该子曲面将被剖分成两个三角形。这时,有两种剖分方法,分别如图4a和4b所示。计算这两种剖分方法的最小内角,采用最小内角较大的剖分方法。
[0097]
若np>2,先将该子曲面剖分成两个部分f1和f2,其中,f1由4个顶点构成,采用np
=2时的剖分方法对f1进行剖分。f2由np个顶点构成,其中,包括一个p
short
的顶点p
short
d和np-1个p
long
的顶点。此时,p
shortd
和所述np-1个p
long
的顶点中每两个相邻的顶点构成一个三角形,完成该子曲面的三角形剖分,如图5所示。
[0098]
完成曲面缝合后,可以对缝合区域的面片进行细化,在一个实施例中,可以设置一个边长阈值k7,若一个三角形网格的任一边长大于k7,则对其进行分割。在一个实施例中,k7可以在1.2~1.5mm的范围内取值。可以理解,k7的取值范围可以根据具体的情况和需求进行调整。
[0099]
此时,获得初步融合的第四三维数字模型,此时,其牙颈处的几何形态可能不够自然,另外,由于所述第一三维数字模型和第二三维数字模型精度不同,融合后,两者过渡处(即牙颈处)可能不够自然,因此,可以对该部分进行三角网格形变处理。
[0100]
在113中,对所述第四三维数字模型的牙颈处进行三角网格形变处理。
[0101]
在一个实施例中,可以所述经平滑的第三三维数字模型的边缘线为基准,对所述第四三维数字模型上的w环邻域(即牙颈区域)进行三角网格变形处理。在一个实施例中,所述w环邻域涵盖所述缝合的曲面。
[0102]
在一个实施例中,可以基于w环邻域的面片数量占所述第四三维数字模型总面片数量的比值以及其是否完全覆盖所述缝合区域,来确定w的数量。在一个实施例中,可以以所述第三三维数字模型的边缘线为基准,在所述第四三维数字模型上搜索一环邻域,若其面片数量与总面片数量的比值大于一个预定值,并且完全覆盖所述缝合区域,那么,停止搜索,否则在已搜索面片的基础上继续搜索一环邻域,依此类推直至满足上述条件。
[0103]
在一个实施例中,可以将所述第四三维数字模型在所述w环邻域以上的部分(靠牙冠的部分)的点作为第一控制点集,将所述w环邻域以下的部分(靠牙根的部分)的点作为第二控制点集,基于所述第一和第二控制点集,利用laplace-beltrami调和形变算法对所述w环邻域的面片进行形变,最后进行面片松弛,获得融合的表示整体牙齿的三维数字模型。
[0104]
在一个实施例中,本技术的牙齿三维数字模型融合方法可以由计算机自动执行,无需人为介入,能够大幅提高效率。
[0105]
尽管在此公开了本技术的多个方面和实施例,但在本技术的启发下,本技术的其他方面和实施例对于本领域技术人员而言也是显而易见的。在此公开的各个方面和实施例仅用于说明目的,而非限制目的。本技术的保护范围和主旨仅通过后附的权利要求书来确定。
[0106]
同样,各个图表可以示出所公开的方法和系统的示例性架构或其他配置,其有助于理解可包含在所公开的方法和系统中的特征和功能。要求保护的内容并不限于所示的示例性架构或配置,而所希望的特征可以用各种替代架构和配置来实现。除此之外,对于流程图、功能性描述和方法权利要求,这里所给出的方框顺序不应限于以同样的顺序实施以执行所述功能的各种实施例,除非在上下文中明确指出。
[0107]
除非另外明确指出,本文中所使用的术语和短语及其变体均应解释为开放式的,而不是限制性的。在一些实例中,诸如“一个或多个”、“至少”、“但不限于”这样的扩展性词汇和短语或者其他类似用语的出现不应理解为在可能没有这种扩展性用语的示例中意图或者需要表示缩窄的情况。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。