1.本技术涉及车辆相关技术领域,具体涉及一种辅助驾驶装置及车辆。
背景技术:
2.一些工程车辆广泛被使用于各种生产生活中。以城市自卸车为例,作为城市内的物流运输设备之一,主要用于各种物料的运输。
3.但是,由于外形庞大,城市自卸车等工程车辆往往存在较大视野盲区,驾驶员难以充分掌握车辆周围情况,对行车带来很大的安全隐患,容易导致交通事故的发生,进一步的,这些车辆的车厢内部携带的物料,若装载的时候没有捆扎结实,也可能在运输的过程中掉出车厢,进而引起交通事故的发生。
技术实现要素:
4.有鉴于此,本技术致力于提供一种辅助驾驶装置及车辆,以降低车辆发生交通事故的概率。
5.根据本技术实施例的第一方面,提供一种辅助驾驶装置,包括:
6.采集车辆四周影像以及车厢内部影像的影像采集装置;
7.与影像采集装置通信连接并将车辆四周影像拼接为全景图像的影像处理单元;
8.与影像处理单元连接,接收并显示全景图像和\或车厢内部影像的显示单元。
9.在一个实施例中,影像处理单元还与车辆的控制装置相连,接收控制装置发送的驾驶信号;
10.其中,驾驶信号用于控制影像处理单元向显示单元发送与驾驶信号对应的影像;
11.驾驶信号包括:停车信号、前行信号、左转信号、右转信号和倒车信号;
12.车辆四周影像包括:车辆前方的影像、车辆左方的影像、车辆右方的影像和车辆后方的影像;
13.前行信号与车辆前方的影像对应;左转信号与车辆左方的影像对应;右转信号与车辆右方的影像对应;倒车信号与车辆后方的影像对应停车信号与车厢内部的影像对应。
14.在一个实施例中,显示单元包括:第一子界面和第二子界面;第一子界面显示全景图像,第二子界面显示与驾驶信号对应的影像。
15.在一个实施例中,还包括:与影像处理单元通信连接的无线通信装置:
16.无线通信装置分别与影像处理单元以及预设的智能终端通信连接。
17.在一个实施例中,还包括:与影像处理单元通信连接的人机交互模块:
18.人机交互模块用于接收用户输入的目标影像显示指令,并将目标影像显示指令发送至影像处理单元;
19.其中,目标影像显示指令用于指示在车辆四周影像中指定目标图像,并控制影像处理单元发送目标图像至显示单元。
20.在一个实施例中,还与影像采集装置通信连接的行车记录仪器;
21.行车记录仪器用于存储影像采集装置采集的车辆四周影像以及车厢内部影像。
22.在一个实施例中,显示单元为触摸显示屏。
23.在一个实施例中,影像采集装置包括:
24.设置在车辆前方的第一摄像头,用于采集车辆前方的影像;
25.设置在车辆左方的第二摄像头,用于采集车辆左方的影像;
26.设置在车辆右方的第三摄像头,用于采集车辆右方的影像;
27.设置在车辆后方的第四摄像头,用于采集车辆后方的影像;
28.设置在车辆的车厢内部的第五摄像头,用于采集车厢内部的影像。
29.在一个实施例中,第一摄像头、第二摄像头、第三摄像头、第四摄像头和第五摄像头均为鱼眼摄像头。
30.根据本技术实施例的第二方面,提供一种车辆,该车辆安装有第一方面提供的任意一种辅助驾驶装置。
31.本技术的实施例所提供的一种辅助驾驶装置,包括:通过影像采集装置,采集车辆前方的影像、车辆后方的影像、车辆左方的影像、车辆右方的影像以及车厢内部的影像;之后通过影像处理单元对影像进行拼接处理,得到全景图像;通过显示单元,接收并显示全景图像,以使得司机可以实时监测车辆周围环境和车厢内部的情况,减小盲区,并及时了解车厢内的运输的物料的状态,提高驾驶的安全性,减少对行车带来很大的安全隐患,降低车辆发生交通事故的概率。
附图说明
32.通过结合附图对本技术实施例进行更详细的描述,本技术的上述以及其他目的、特征和优势将变得更加明显。附图用来提供对本技术实施例的进一步理解,并且构成说明书的一部分,与本技术实施例一起用于解释本技术,并不构成对本技术的限制。在附图中,相同的参考标号通常代表相同部件或步骤。
33.图1所示为本技术一个实施例提供的辅助驾驶装置的结构示意图。
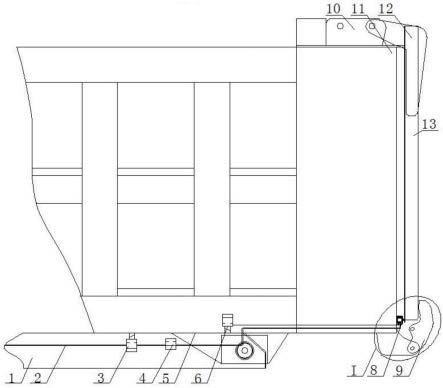
34.图2所示为本技术一个实施例提供的辅助驾驶装置的部分结构示意图。
35.图3所示为本技术一个实施例提供的辅助驾驶装置的显示单元示意图。
36.附图标记:
37.1-影像采集装置;
ꢀꢀꢀꢀꢀꢀꢀꢀ
11-第一摄像头;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12-第二摄像头;
38.13-第三摄像头;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14-第四摄像头;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15-第五摄像头;
39.2-影像处理单元;
ꢀꢀꢀꢀꢀꢀꢀꢀ
3-显示单元;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31-第一子界面;
40.32-第二子界面;
ꢀꢀꢀꢀꢀꢀꢀꢀ
4-无线通信装置;
ꢀꢀꢀꢀꢀꢀꢀ
5-智能终端;
41.6-人机交互模块;
ꢀꢀꢀꢀꢀꢀꢀ
7-行车记录仪器。
具体实施方式
42.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
43.申请概述
44.一些工程车辆广泛被使用于各种生产生活场景中。以城市自卸车为例,作为城市内的物流运输设备之一,主要用于各种物料的运输。但是,由于外形庞大,城市自卸车等工程车辆往往存在较大视野盲区,驾驶员难以充分掌握车辆周围情况,对行车带来很大的安全隐患,容易导致交通事故的发生,进一步的,这些车辆的车厢内部携带的物料,若装载的时候没有捆扎结实,也可能在运输的过程中掉出车厢,进而引起交通事故的发生。
45.为了解决上述问题,本技术实施例提供一种辅助驾驶装置,采集车辆四周影像以及车厢内部影像,将车辆四周影像拼接为全景图像,之后显示全景图像和\或车厢内部影像。如此,司机可以基于显示的图像快速的了解视野盲区和车厢内部的情况,基于显示的图像进行车辆的驾驶,充分掌握车辆周围情况和车厢内的情况,减少交通事故的发生的概率。
46.介绍了本技术的基本原理之后,下面将参考附图来具体介绍本技术的各种非限制性实施例。
47.示例性辅助驾驶装置
48.图1是本技术一个实施例提供的一种辅助驾驶装置的结构示意图。参照图1,辅助驾驶装置包括:采集车辆四周影像以及车厢内部影像的影像采集装置1;与影像采集装置1通信连接并将车辆四周影像拼接为全景图像的影像处理单元2;与影像处理单元2连接,接收并显示全景图像和\或车厢内部影像的显示单元3。
49.如此设置,通过影像采集装置1,采集车辆前方的影像、车辆后方的影像、车辆左方的影像、车辆右方的影像以及车厢内部的影像;之后通过影像处理单元2对影像进行拼接处理,得到全景图像;通过显示单元3,接收并显示全景图像,以使得司机可以实时监测车辆周围环境和车厢内部的情况,减小盲区,并及时了解车厢内的运输的物料的状态,提高驾驶的安全性,减少对行车带来很大的安全隐患,降低车辆发生交通事故的概率。
50.需要说明的是,将车辆四周影像拼接为全景图像为现有技术,具体可以参照现有技术中的全景倒车影像的实现方式。基于此本技术实施例不涉及程序的改进。
51.需要说明的是,在实际应用中,可以将显示单元3的显示界面分为多个子界面,分别显示全景图像和车厢内部影像;当然也可以将车厢内部影像整合在全景图像中车辆模型的车厢位置,基于上述两种方式均可以使得司机快速准确的了解车辆车厢内部和车辆盲区内的情况。
52.在一个实施例中,影像处理单元2还与车辆的控制装置相连,接收控制装置发送的驾驶信号;其中,驾驶信号用于控制影像处理单元2向显示单元3发送与驾驶信号对应的影像;
53.需要说明的是,车辆的控制装置可以为车辆的中控系统或车辆的转向系统。驾驶信号包括:停车信号、前行信号、左转信号、右转信号和倒车信号;车辆四周影像包括:车辆前方的影像、车辆左方的影像、车辆右方的影像和车辆后方的影像;前行信号与车辆前方的影像对应;左转信号与车辆左方的影像对应;右转信号与车辆右方的影像对应;倒车信号与车辆后方的影像对应停车信号与车厢内部的影像对应。
54.需要说明的是,基于驾驶信息确定显示的影像为现有技术,具体可以参照现有技术中的倒车影像的实现方式。例如现有的车辆一般被配置为在倒车时,车载显示屏自动显示车辆后方影像。基于此本技术实施例不涉及程序的改进。
55.如此,显示单元3可以基于车辆的驾驶情况,显示司机在当前驾驶情况下需要的影像,使得司机可以便捷的获取自己的关心的盲区内的影像,无需自己司机自己在多个影像中寻找自己关心的影像,以使得司机可以更加专注于车辆的驾驶,提高驾驶的安全性。
56.在一个实施例中,参照图2,影像采集装置1包括:设置在车辆前方的第一摄像头11,用于采集车辆前方的影像;设置在车辆左方的第二摄像头12,用于采集车辆左方的影像;设置在车辆右方的第三摄像头13,用于采集车辆右方的影像;设置在车辆后方的第四摄像头14,用于采集车辆后方的影像;设置在车辆的车厢内部的第五摄像头15,用于采集车厢内部的影像。具体的,第一摄像头11、第二摄像头12、第三摄像头13、第四摄像头14和第五摄像头15可以但不限于为鱼眼摄像头。
57.具体的,参照图3,显示单元3可以包括:第一子界面31和第二子界面32;第一子界面31显示全景图像,第二子界面32显示与驾驶信号对应的影像。其中,显示单元3可以设置在车辆的前面板,以便于司机查看显示单元3。
58.如此设置,可以同时显示司机在驾驶中关心的影像和全景图像,使得司机在关注自己的关心的影像时,还可以基于全景图像了解车辆的整体驾驶环境。需要说明的是,显示单元3可以包括多个子界面。具体的,子界面的数量可以基于实际需求确定。本技术实施例仅仅是实例性的以两个子界面(第一子界面和第二子界面)的情况进行说明。
59.以司机在进行右转为例进行说明:司机在右转车辆时,车辆的控制装置向影像处理单元2还与车辆的控制装置相连,接收控制装置发送的驾驶信号;其中,驾驶信号用于控制影像处理单元2向显示单元3发送与驾驶信号对应的影像(即与右转信号对应的车辆右方的影像);影像处理单元2接收信号后,基于信号进行向显示单元3发送车辆右方的影像。此时,像处理单元可以同时向显示单元3发送车辆右方的影像和全景图像,使得,显示单元3的第一子界面31显示全景图像,第二子界面32显示车辆右方的影像。如此,司机可以基于显示单元3,快读的查看全景图像和车辆右方的影像。
60.在一个实施例中,参照图2,辅助驾驶装置,还包括:与影像处理单元2通信连接的无线通信装置4:无线通信装置4分别与影像处理单元2以及预设的智能终端5通信连接。其中,预设的智能终端5可以是预设的服务器,也可以是预设的云端服务后台。如此设置可以实时将采集的影像发送至预设的智能终端5,以便于相关人员可以基于智能终端5查看车辆的驾驶状态。当前在实际应用中,发送至预设智能终端5的数据还可以包括车辆的驾驶信号,以及其它的从车辆中控系统获取的车辆信息,以便于相关人员可以确切的了解车辆的驾驶状态。
61.进一步的,智能终端5还可以对获取的信息进行存储,以便于后期的调用。
62.在一个实施例中,参照图2,辅助驾驶装置还包括:与影像处理单元2通信连接的人机交互模块6:人机交互模块6用于接收用户输入的目标影像显示指令,并将目标影像显示指令发送至影像处理单元2;其中,目标影像显示指令用于指示在车辆四周影像中指定目标图像,并控制影像处理单元2发送目标图像至显示单元3。
63.需要说明的是,在一些情况下,显示单元3显示的影像可能并不是司机实际期望的影像,此时,可以由司机通过人机交互模块6输入“目标影像显示指令”,通过“目标影像显示指令”控制影像处理单元2发送自己期望的影像(即:目标图像)至显示单元3,使得显示单元3可以显示自己期望的影像。具体的,人机交互模块6的具体设置方式有多种。例如:人机交
互模块6可以为遥控、触摸显示屏或者按钮。具体的,显示单元3也可以为显示屏。显示单元3和人机交互模块6可以整合为一块触控显示屏。
64.在一个实施例中,辅助驾驶装置还包括:与影像采集装置1通信连接的行车记录仪器7;行车记录仪器7用于存储影像采集装置1采集的车辆四周影像以及车厢内部影像。行车记录仪即记录车辆行驶途中的影像等相关资讯的仪器。安装行车记录仪后,能够记录车辆行驶全过程的视频图像,可为交通事故提供证据。
65.示例性车辆
66.本技术的实施例还提供一种车辆,该车辆:安装上述任一项辅助驾驶装置。如此设置,如此设置,通过影像采集装置1,采集车辆前方的影像、车辆后方的影像、车辆左方的影像、车辆右方的影像以及车厢内部的影像;之后通过影像处理单元2对影像进行拼接处理,得到全景图像;通过显示单元3,接收并显示全景图像,以使得司机可以实时监测车辆周围环境和车厢内部的情况,减小盲区,并及时了解车厢内的运输的物料的状态,提高驾驶的安全性,减少对行车带来很大的安全隐患,降低车辆发生交通事故的概率。
67.具体的,车辆可以为城市自卸车。
68.为了例示和描述的目的已经给出了以上描述。此外,此描述不意图将本技术的实施例限制到在此公开的形式。尽管以上已经讨论了多个示例方面和实施例,但是本领域技术人员将认识到其某些变型、修改、改变、添加和子组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。