1.本实用新型涉及激光清洗技术领域,特别是涉及一种激光清洗笔。
背景技术:
2.发动机长时间工作后,在其燃烧室的内壁以及进排气支管的管壁上会出现大量积碳现象。当积碳量达到一定程度后,将一定程度地影响到发动机的性能以及使用寿命,因此需要定期地或不定期地对发动机进行清洗操作。传统的清洗方式一般是利用化学药剂和机械方法对发动机进行清洗。然而,在对发动机清洗操作前,需要将发动机拆机处理,然后再实施清洗操作,清洗效率较低,且当燃烧室和/或排气支管的管壁上颗粒积碳粘得很紧时,传统的清洗方式将难以使得被清洗物表面上的沉积物有效去除。
技术实现要素:
3.基于此,有必要克服现有技术的缺陷,提供一种激光清洗笔,它能够提高清洗效果,以及保证清洗效率。
4.其技术方案如下:一种激光清洗笔,所述激光清洗笔包括:
5.外壳;
6.激光头,所述激光头设置于所述外壳内,所述激光头用于发射激光;
7.棱镜,所述棱镜设置于所述外壳内并位于所述激光头的前方,所述棱镜上设有图案层,所述棱镜用于将所述激光整形处理得到整形光斑;以及
8.聚焦镜,所述聚焦镜设置于所述外壳内并位于所述棱镜的前方,所述聚焦镜用于将所述整形光斑聚焦处理得到聚焦光斑。
9.上述的激光清洗笔,具体例如用于清洗发动机的燃烧室以及排气支管的管壁过程中,外壳直接塞入到燃烧室内部或排气支管内部,激光头发射激光,激光经过棱镜整形处理得到整形光斑,整形光斑通过聚焦镜聚焦处理得到聚焦光斑,聚焦光斑打在被清洗物的壁面时,便能实现将被清洗物的壁面上积炭去掉,具有较好的清洗效果。如此可见,能实现小空间内随时进行激光清洗积炭,免拆,清洗效率较高,清洗效果较好,方便高效精准,解决了小空间内积碳无法清理的技术难点。
10.在其中一个实施例中,所述激光清洗笔还包括摄像头;所述摄像头直接地或间接地设置于所述外壳上,所述摄像头用于获取待清洗部位和/或所述待清洗部位所在环境的图像。
11.在其中一个实施例中,所述激光清洗笔还包括反射镜;所述反射镜设置于所述外壳的内部并位于所述聚焦镜的前方,所述反射镜设有反射面,所述反射面与所述激光头的激光发射方向呈夹角设置;所述外壳上形成有出光部,所述反射面反射的激光通过所述出光部向外射出。
12.在其中一个实施例中,所述激光清洗笔还包括摄像头;所述反射镜上设有安装孔,所述安装孔延伸到所述反射面,所述摄像头设置于所述安装孔并位于所述反射面上。
13.在其中一个实施例中,所述外壳包括转动壳体组件与固定壳体组件,所述转动壳体组件与所述固定壳体组件转动相连;所述激光清洗笔还包括传动元件与驱动机构;所述棱镜、所述聚焦镜、所述反射镜设置于所述转动壳体组件内,所述传动元件与所述转动壳体组件相连,所述传动元件能够带动所述转动壳体组件转动,所述传动元件还转动地设置于所述固定壳体组件内,所述传动元件与所述激光头相连,所述传动元件还能将所述激光头的激光导入到所述棱镜;所述驱动机构设置于所述固定壳体组件内,所述驱动机构用于驱动所述传动元件绕其中心轴线转动。
14.在其中一个实施例中,所述驱动机构包括固定地设置于所述固定壳体组件上的电机,与所述电机的转轴相连的第一齿轮,设置于所述传动元件上的第二齿轮;所述第一齿轮与所述第二齿轮相啮合。
15.在其中一个实施例中,所述激光清洗笔还包括控制板以及设置于所述固定壳体组件上的控制按键;所述控制按键、所述驱动机构、所述激光头均与所述控制板电性连接。
16.在其中一个实施例中,所述激光清洗笔还包括设置于所述固定壳体组件内部的电滑环,所述电滑环套设于所述传动元件的外部,所述摄像头设有连接导线,所述连接导线与所述电滑环电性连接;所述电滑环与所述控制板电性连接。
17.在其中一个实施例中,所述转动壳体组件包括第一转动壳与第二转动壳,所述第一转动壳的一端与所述第二转动壳相连,所述第一转动壳另一端与传动元件相连,所述第一转动壳设置于所述固定壳体组件的内部,所述棱镜与所述聚焦镜设置于所述第一转动壳内部;所述反射镜设置于所述第二转动壳内部,所述固定壳体组件的端部与所述第一转动壳或所述第二转动壳转动相连;所述激光清洗笔还包括设置于所述第二转动壳内部的定位块,所述定位块分别与所述反射镜以及所述第二转动壳相抵触,所述定位块能够将进入到所述第二转动壳内部的激光导入到所述反射镜。
18.在其中一个实施例中,所述固定壳体组件包括沿着所述激光头的激光发射方向依次设置的至少两个固定壳单体;和/或,所述固定壳体组件上远离于所述转动壳体组件的一端设有可拆卸的封堵头。
附图说明
19.构成本技术的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
20.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
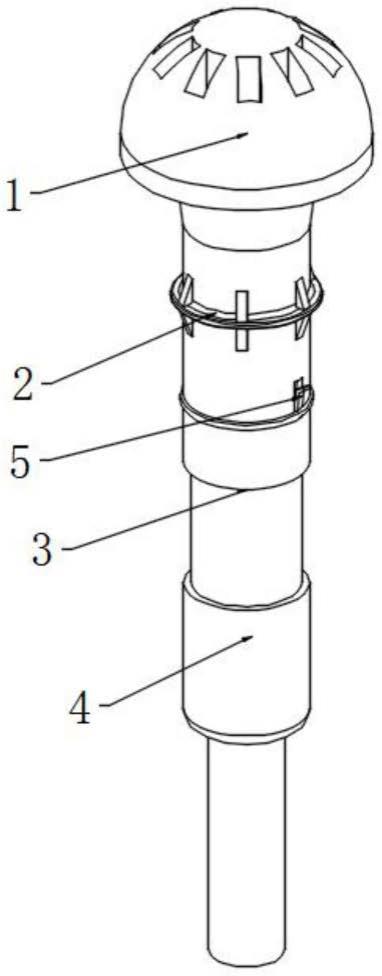
21.图1为本实用新型一实施例的激光清洗笔的一视角结构示意图;
22.图2为本实用新型一实施例的激光清洗笔的分解结构示意图;
23.图3为本实用新型一实施例的激光清洗笔的另一视角结构示意图;
24.图4为图3在a-a处的剖视结构示意图;
25.图5为图4在b处的放大结构示意图;
26.图6为图4在c处的放大结构示意图。
27.10、外壳;101、出光部;102、透光罩;11、转动壳体组件;111、第一转动壳;112、第二转动壳;12、固定壳体组件;121、固定壳单体;122、封堵头;20、激光头;30、棱镜;40、聚焦镜;50、摄像头;51、连接导线;60、反射镜;61、反射面;62、安装孔;70、传动元件;80、驱动机构;81、第一齿轮;82、第二齿轮;91、控制按键;92、电滑环;93、定位块。
具体实施方式
28.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施例的限制。
29.参阅图1与图2,图1示出了本实用新型一实施例的激光清洗笔的一视角结构示意图,图2示出了本实用新型一实施例的激光清洗笔的分解结构示意图。本实用新型一实施例提供的一种激光清洗笔,激光清洗笔包括:外壳10、激光头20、棱镜30以及聚焦镜40。激光头20设置于外壳10内,激光头20用于发射激光。棱镜30设置于外壳10内并位于激光头20的前方,棱镜30上设有图案层(图中未示意出),棱镜30用于将激光整形处理得到整形光斑。聚焦镜40设置于外壳10内并位于棱镜30的前方,聚焦镜40用于将整形光斑聚焦处理得到聚焦光斑。
30.上述的激光清洗笔,具体例如用于清洗发动机的燃烧室以及排气支管的管壁过程中,外壳10直接塞入到燃烧室内部或排气支管内部,激光头20发射激光,激光经过棱镜30整形处理得到整形光斑,整形光斑通过聚焦镜40聚焦处理得到聚焦光斑,聚焦光斑打在被清洗物的壁面时,便能实现将被清洗物的壁面上积炭去掉,具有较好的清洗效果。如此可见,能实现小空间内随时进行激光清洗积炭,免拆,清洗效率较高,清洗效果较好,方便高效精准,解决了小空间内积碳无法清理的技术难点。
31.需要说明的是,整形光斑的形状与图案层相关,也即根据图案层的镂空图案的形状来决定。当图案层的镂空图案例如为w形状、s形状、z形状、m形状等等规则形状或不规则形状时,所得到的整形光斑的形状相应为w形状、s形状、z形状、m形状等等规则形状或不规则形状。
32.还需要说明的是,棱镜30位于激光头20的前方指的是,以激光头20的激光发射方向作为参照,激光头20与棱镜30沿着激光发射方向依次设置。
33.同样地,聚焦镜40位于棱镜30的前方指的是,以激光头20的激光发射方向作为参照,棱镜30与聚焦镜40沿着激光发射方向依次设置。
34.请参阅图2、图4与图5,在一个实施例中,激光清洗笔还包括摄像头50。摄像头50直接地或间接地设置于外壳10上,摄像头50用于获取待清洗部位和/或待清洗部位所在环境的图像。如此,通过摄像头50能获取到待清洗部位和/或待清洗部位所在环境的图像,通过观察该图像,能得知清洗效果,以及根据该图像灵活地调整清洗操作,有利于保证清洗效果。
35.请参阅图2、图4与图5,在一个实施例中,激光清洗笔还包括反射镜60。反射镜60设置于外壳10的内部并位于聚焦镜40的前方,反射镜60设有反射面61,反射面61与激光头20
的激光发射方向呈夹角设置。外壳10上形成有出光部101,反射面61反射的激光通过出光部101向外射出。如此,聚焦镜40的聚焦光斑射向反射镜60后,通过反射镜60反射,反射镜60反射的聚焦光斑通过出光部101向外射出,向外射出的聚焦光斑接触到待清洗部位时便起到清洗作用。此外,当驱动外壳10绕其中心轴线(也即激光头20的激光发射方向,如图1中的箭头o所示)转动时,由于反射镜60反射出的聚焦光斑的射出方向与中心轴线呈夹角设置,这样经过出光部101向外射出的聚焦光斑呈环状,清洗范围较大。
36.在一个实施例中,反射镜60的反射面61上设有包括但不限于金层或银层,能对激光起到较好的反射作用。
37.在一个实施例中,出光部101包括但不限于为形成于外壳10的侧壁上的窗口或透明部,经过反射面61反射的激光通过窗口直接向外射出,或者通过透明部向外射出。
38.作为一个可选的方案,也可以省略掉反射镜60,并使出光部101设置于外壳10体的头部,即位于聚焦镜40的正前方。这样聚焦镜40的聚焦光斑直接通过位于其前方的出光部101向外射出。
39.在一个实施例中,反射面61与激光头20的激光发射方向间的夹角包括但不限于为15
°‑
180
°
。具体例如为15
°
、30
°
、45
°
、50
°
、55
°
、60
°
、75
°
、80
°
、90
°
、95
°
、100
°
、115
°
、130
°
、150
°
、180
°
等等。
40.请参阅图2、图4与图5,在一个实施例中,激光清洗笔还包括摄像头50。反射镜60上设有安装孔62。安装孔62延伸到反射面61,摄像头50设置于安装孔62并位于反射面61上。如此,摄像头50能够直接同步地获取到激光正在清洗的部位的图像,能观察到清洗部位的清洗效果。
41.在一个实施例中,摄像头50不限于设置于反射面61上,还可以是设置于反射镜60上的其它任意位置,可以根据实际需求灵活地调整与设置。具体例如,摄像头50朝向前方设置,并在外壳10的头部设置有透光罩102,摄像头50直接获取外壳10的正前方的图像。
42.请参阅图2、图4与图5,在一个实施例中,外壳10包括转动壳体组件11与固定壳体组件12。转动壳体组件11与固定壳体组件12转动相连。激光清洗笔还包括传动元件70与驱动机构80。棱镜30、聚焦镜40、反射镜60设置于转动壳体组件11内。传动元件70与转动壳体组件11相连,传动元件70能够带动转动壳体组件11转动,传动元件70还转动地设置于固定壳体组件12内,传动元件70与激光头20相连,传动元件70还能将激光头20的激光导入到棱镜30。此外,驱动机构80设置于固定壳体组件12内,驱动机构80用于驱动传动元件70绕其中心轴线转动。如此,一方面,传动元件70能实现将激光头20的激光导入到棱镜30;另一方面,在驱动机构80的驱动下,能实现驱动传动元件70转动,传动元件70转动时,能驱动转动壳体组件11转动,转动壳体组件11转动时,能相应调整出光部101的出光位置,无需人工来手动转动外壳10,自动化程度较高,清洗区域较大。
43.在一个实施例中,传动元件70例如为传动管,激光头20的激光通过传动管的管孔向前传输到棱镜30上。当然,传动元件70也可以设置成导光材质,激光头20的激光经传动元件70导向向前传输到棱镜30上。
44.请参阅图2、图4与图5,在一个实施例中,传动元件70既可以与激光头20两者转动相连,也可以是保持同步转动,在此不进行限定,可以根据实际需求灵活设置。
45.请参阅图2、图4与图6,在一个实施例中,驱动机构80包括固定地设置于固定壳体
组件12上的电机,与电机的转轴相连的第一齿轮81,设置于传动元件70上的第二齿轮82。第一齿轮81与第二齿轮82相啮合。如此,电机转动时,电机驱动第一齿轮81转动,第一齿轮81带动第二齿轮82转动,第二齿轮82带动传动元件70转动。
46.请参阅图2、图4与图6,在一个实施例中,激光清洗笔还包括控制板以及设置于固定壳体组件12上的控制按键91。控制按键91、驱动机构80、激光头20均与控制板电性连接。如此,通过操作控制按键91,将控制信号传递给控制板,控制板相应控制激光头20工作,以及控制驱动机构80工作。
47.在一个实施例中,在固定壳体组件12上例如设置有触控屏,触控屏与控制板电性连接。如此,通过触控屏来进行控制操作,实现控制激光头20工作,以及控制驱动机构80工作。
48.请参阅图2、图4与图6,在一个实施例中,激光清洗笔还包括设置于固定壳体组件12内部的电滑环92。电滑环92套设于传动元件70的外部,摄像头50设有连接导线51,连接导线51与电滑环92电性连接。电滑环92与控制板电性连接。如此,摄像头50通过电滑环92与控制板电性连接,电滑环92对于摄像头50的转动不会造成干涉,能保证摄像头50根据实际需求顺利地转动,拍摄图像不会因为发生转动而受到影响。
49.请参阅图2、图4与图5,在一个实施例中,转动壳体组件11包括第一转动壳111与第二转动壳112。第一转动壳111的一端与第二转动壳112相连,第一转动壳111另一端与传动元件70相连,第一转动壳111设置于固定壳体组件12的内部。棱镜30与聚焦镜40设置于第一转动壳111内部。反射镜60设置于第二转动壳112内部,固定壳体组件12的端部与第一转动壳111或第二转动壳112转动相连。此外,激光清洗笔还包括设置于第二转动壳112内部的定位块93,定位块93分别与反射镜60以及第二转动壳112相抵触,定位块93能够将进入到第二转动壳112内部的激光导入到反射镜60。
50.在一个实施例中,第一转动壳111例如为截面为圆形、方形或其它形状的套体。此外,第二转动壳112与第一转动壳111对接的位置设有透光口,这样激光通过透光口进入到第二转动壳112的内部。
51.需要说明的是,作为一个实例,定位块93为导光材料制成的结构件,还可以是设置有激光通过的通道。
52.请参阅图2与图4,在一个实施例中,固定壳体组件12包括沿着激光头20的激光发射方向依次设置的至少两个固定壳单体121。和/或,固定壳体组件12上远离于转动壳体组件11的一端设有可拆卸的封堵头122。
53.需要说明的是,固定壳单体121包括但不限于为轴向截面为圆形、方形、三角形、六边形等等形状的壳套。此外,相邻两个固定壳单体121的连接形式包括但不限于为螺纹配合连接、粘接、或者采用螺钉、销钉、铆钉、卡接件可拆卸相连等等。
54.需要说明的是,该“封堵头122”可以为“固定壳单体121的一部分”,即“封堵头122”与“固定壳单体121的其他部分”一体成型制造;也可以与“固定壳单体121的其他部分”可分离的一个独立的构件,即“封堵头122”可以独立制造,再与“固定壳单体121的其他部分”组合成一个整体。
55.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛
盾,都应当认为是本说明书记载的范围。
56.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
57.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
58.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
59.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
60.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
61.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。